fins专题
基于FINS协议的OMRON PLC与上位机以太网通信的实现
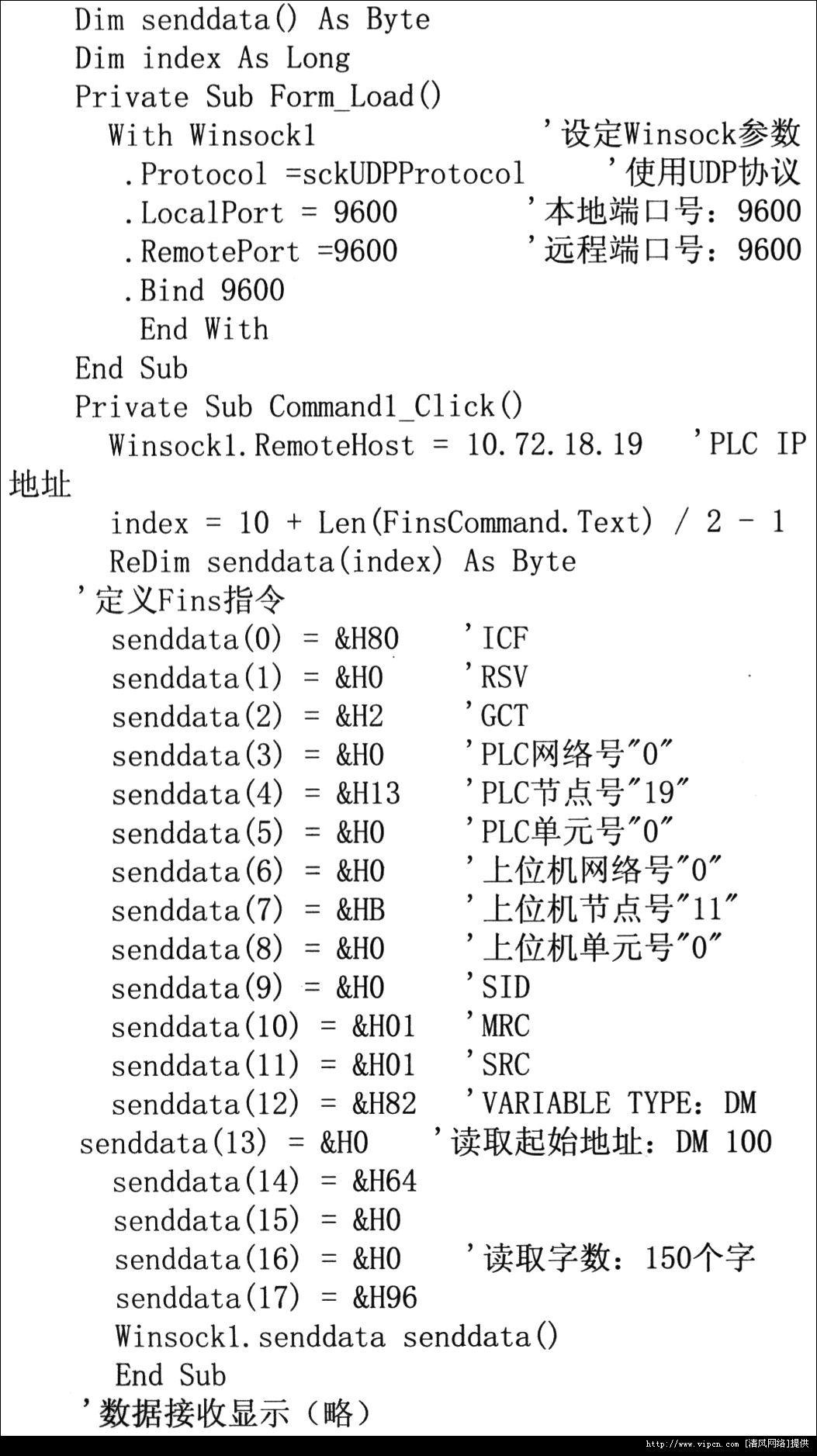
基于FINS协议的OMRON PLC与上位机以太网通信的实现[多图] 0 引言 在当代工业自动化控制系统中,可编程逻辑控制器(PLC)作为常用的现场控制设备,上位机作为数据采集及人机界面的一种已经得到广泛运用。过去,在工程项目开发中,PLC和上位机间的通信常采用RS-232C或者RS-485串行方式,这种要领很难满足数据量大、通信距离远、实时性要求高的控制系统。随着

工业互联网通讯协议—欧姆龙(Fins tcp)
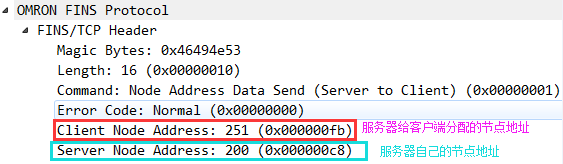
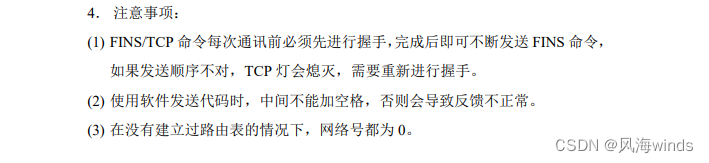
一、场景 近期公司要对欧姆龙CP系列设备的数据采集,于是就研究了下欧姆龙的Fins Tcp协议。 二、Fins Tcp 组成字节说明固定头446494E53 FINS对应的ASCII码的十六进制长度4后面剩余指令的长度命令4 握手固定为:00000000 读写固定为:00000002 错误码4 00000000:正常 00000001:头不是‘FINS’(ASCII code) 000000
![[激光原理与应用-80]:PLC通信协议之-OMRON欧姆龙FINS TCP通信协议详细解析](https://img-blog.csdnimg.cn/direct/1360691f0f6e48b5934d1c96f9f3775e.png)
[激光原理与应用-80]:PLC通信协议之-OMRON欧姆龙FINS TCP通信协议详细解析
目录 一、OMRON欧姆龙 PLC简介 1.1 OMRON欧姆龙 PLC 1.2 OMRON欧姆龙 PLC通信协议简介 1.3 通信架构 二、欧姆龙FINS协议简介 2.1 简介 2.2 协议分层 2.3 OMRON(欧姆龙)FINS协议的本质 2.4 OMRON(欧姆龙)FINS(Factory Interface Network Service)如何与外部软件通信 三、Fi

Omron-Fins协议
1. 协议概述 欧姆龙(Omron)是来自日本的知名电子和自控设备制造商,其中、小型PLC在国内市场有较高的占有率,有CJ、CM等系列。PLC可以支持Fins、Host link等协议进行通信。 支持以太网的欧姆龙PLC CPU、以太网通信模块根据型号的不同,一般都会支持FINS(Factory Interface Network Service)协议,一些模块也会支持Ethe

python实现FINS协议的TCP服务端(篇一)
python实现FINS协议的TCP服务端是一件稍微麻烦点的事情。它不像modbusTCP那样,可以使用现成的pymodbus模块去实现。但是,我们可以根据协议帧进行组包,自己去实现帧的格式,而这一切可以基于socket模块。本文为第一篇。 一、了解FINS协议 参考文档:FinsTCP协议报文详细分析 - 知乎 1、什么是FINS协议 FINS(Factory Interface Net

欧姆龙NJ1P2 Fins Udp通讯
NJ1P2 Tcp连接不成功,咨询客服说不支持Fins Tcp,所以改成Udp方式。 Udp连接: locateIp = IPAddress.Parse(txtLocateIP.Text); locatePoint = new IPEndPoint(locateIp, Convert.ToInt32(txtLocatePort.Text));
欧姆龙NJ1P2 Fins Udp通讯
NJ1P2 Tcp连接不成功,咨询客服说不支持Fins Tcp,所以改成Udp方式。 Udp连接: locateIp = IPAddress.Parse(txtLocateIP.Text); locatePoint = new IPEndPoint(locateIp, Convert.ToInt32(txtLocatePort.Text));
Epson机器人发送Fins TCP 命令读写欧姆龙PLC数据
一、硬件与需求 Epson机器人型号:T3-B401S,欧姆龙PLC型号:CJ2M-CPU35。现场调试时发现Epson这款机器人只支持Modbus做从机被访问,其他通讯方式需要另行购买硬件。 欧姆龙CJ2M系列PLC内置EtherNet/IP端口,但这里无法直接使用上。 评估后决定使用标准I/O的方式完成PLC对Epson机器人的控制
Epson机器人发送Fins TCP 命令读写欧姆龙PLC数据
一、硬件与需求 Epson机器人型号:T3-B401S,欧姆龙PLC型号:CJ2M-CPU35。现场调试时发现Epson这款机器人只支持Modbus做从机被访问,其他通讯方式需要另行购买硬件。 欧姆龙CJ2M系列PLC内置EtherNet/IP端口,但这里无法直接使用上。 评估后决定使用标准I/O的方式完成PLC对Epson机器人的控制

基于Fins协议使用python实现PC与PLC的通讯
首先,下载源代码。 流程图如图所示: 要使用fins协议与PLC通讯,要根据fins生成相应的握手帧,指令帧,根据协议读取返回帧。 第一步,要实现与PLC的握手,需要PC发送握手帧。 生成握手帧: def createHandshake(self, Ip):try:shakeHandsStr = '46494E530000000C0000000000000000000000' # 前面这些数
基于Fins协议使用python实现PC与PLC的通讯
首先,下载源代码。 流程图如图所示: 要使用fins协议与PLC通讯,要根据fins生成相应的握手帧,指令帧,根据协议读取返回帧。 第一步,要实现与PLC的握手,需要PC发送握手帧。 生成握手帧: def createHandshake(self, Ip):try:shakeHandsStr = '46494E530000000C0000000000000000000000' # 前面这些数
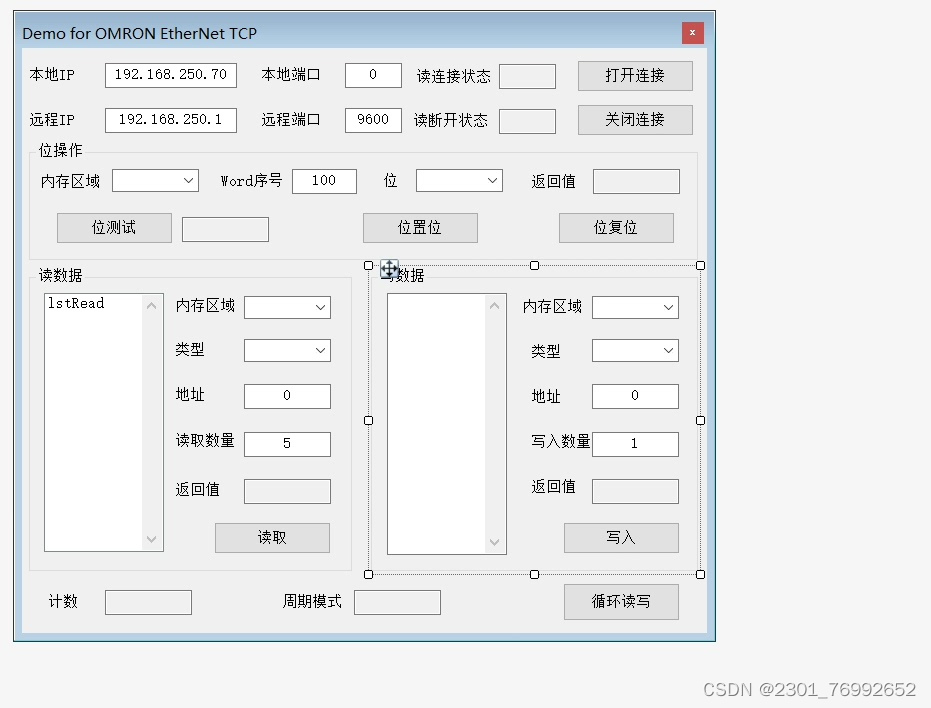
C#欧姆龙plc Fins Tcp通信案例上位机源码
C#欧姆龙plc Fins Tcp通信案例上位机源码,有c#和VB的Demo,c#上位机和欧姆龙plc通讯案例源码,调用动态链接库,可以实现上位机的数据连接,可以简单实现D区W区定时器计数器等数据区的读写,是一个非常好的学习案例 ID:515698644703164
C#欧姆龙plc Fins Tcp通信案例上位机源码
C#欧姆龙plc Fins Tcp通信案例上位机源码,有c#和VB的Demo,c#上位机和欧姆龙plc通讯案例源码,调用动态链接库,可以实现上位机的数据连接,可以简单实现D区W区定时器计数器等数据区的读写,是一个非常好的学习案例 ID:515698644703164