本文主要是介绍Epson机器人发送Fins TCP 命令读写欧姆龙PLC数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、硬件与需求
Epson机器人型号:T3-B401S,欧姆龙PLC型号:CJ2M-CPU35。现场调试时发现Epson这款机器人只支持Modbus做从机被访问,其他通讯方式需要另行购买硬件。
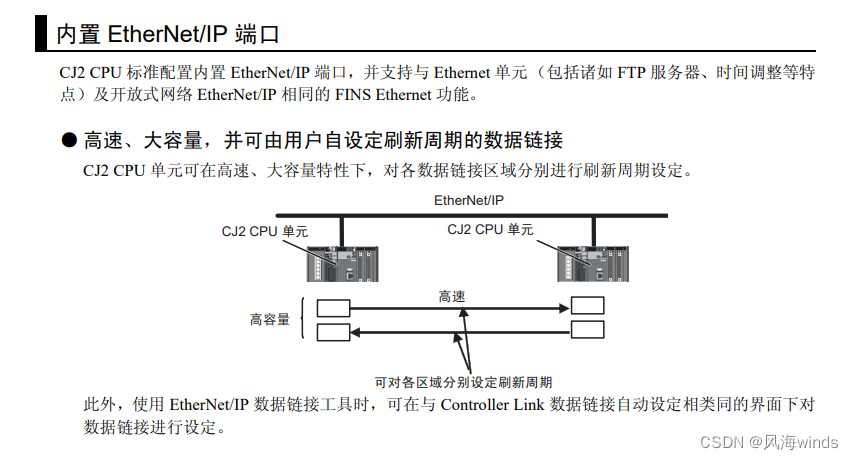
欧姆龙CJ2M系列PLC内置EtherNet/IP端口,但这里无法直接使用上。
评估后决定使用标准I/O的方式完成PLC对Epson机器人的控制和一些重要交互,例如机器人程序启停、机器人系统状态、取放料允许信号和取放料完成信号,而其他时效性低的数据例如产品换型等,则通过机器人侧发送FinsTCP报文读写PLC地址,从而实现数据交换。
二、设计程序
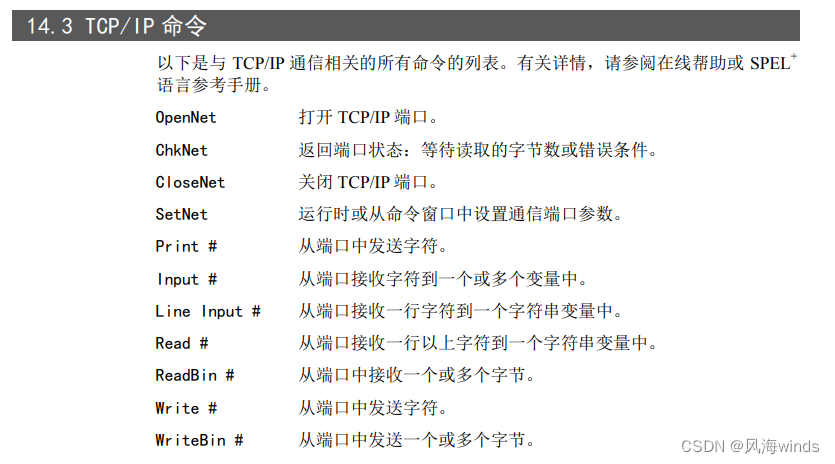
查阅Epson机器人手册,了解TCP/IP通信相关命令。
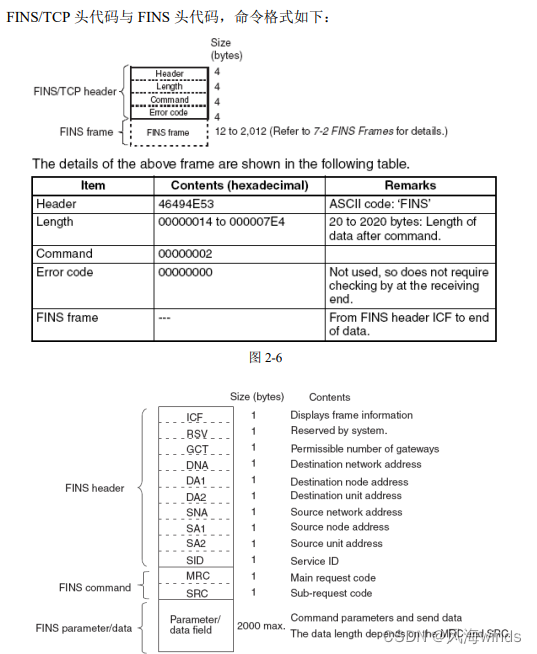
查阅欧姆龙通讯命令参考手册,了解Fins/TCP命令格式。也可直接参考他人博客的解说,更容易理解,例如我参考了这篇:《欧姆龙PLC的FinsTCP协议》(http://t.csdn.cn/qk6fY)。
建议将电脑与PLC用网线连接,然后参照手册中的数据格式,在网络调试助手中手动编辑发送一些报文,接着核对返回数据。对数据格式越熟悉,后面调试机器人中写的通讯程序时,越容易分析出错误原因。
#### 下面是我参照手册用调试助手发送和接收的数据,然后按照自己的理解尝试分析
#### 电脑IP:192.168.250.100
#### PLC_IP: 192.168.250.90
第一步发送握手命令:
TX: 46 49 4E 53 00 00 00 0C 00 00 00 00 00 00 00 00 00 00 00 64
RX: 46 49 4E 53 00 00 00 10 00 00 00 01 00 00 00 00 00 00 00 64 00 00 00 5A
以HEX发送:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 0C +命令码00 00 00 00 +错误码00 00 00 00) +Fins数据(主机地址00 00 00 64)
以HEX接收:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 10 +命令码00 00 00 01 +错误码00 00 00 00)+Fins数据(主机地址00 00 00 64 +从机地址00 00 00 5A)
第二步读取PLC地址DM300内的数据:
TX: 46 49 4E 53 00 00 00 1A 00 00 00 02 00 00 00 00 80 00 02 00 5A 00 00 64 00 00 01 01 82 01 2C 00 00 01
RX: 46 49 4E 53 00 00 00 18 00 00 00 02 00 00 00 00 C0 00 02 00 64 00 00 5A 00 00 01 01 00 00 00 7B
以HEX发送:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 1A +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定80 00 02 +目标地址00 5A 00 +源地址00 64 00 +固定00) +读功能码01 01 +访问存储区82 + 访问起始地址01 2C +固定00 +访问数量 00 01)
以HEX接收:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 18 +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定C0 00 02 +目标地址00 64 00 +源地址00 5A 00 +固定00) +返回功能码01 01 +固定00 00 + 数据00 78)
第三步向PLC地址DM300写入数据321:
TX: 46 49 4E 53 00 00 00 1C 00 00 00 02 00 00 00 00 80 00 02 00 5A 00 00 64 00 00 01 02 82 01 2C 00 00 01 01 41
RX: 46 49 4E 53 00 00 00 16 00 00 00 02 00 00 00 00 C0 00 02 00 64 00 00 5A 00 00 01 02 00 00
以HEX发送:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 1C +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定80 00 02 +目标地址00 5A 00 +源地址00 64 00 +固定00) +写功能码01 02 +访问存储区82 + 访问起始地址01 2C +固定00 +访问数量 00 01 +数据01 41)
以HEX接收:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 16 +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定C0 00 02 +目标地址00 64 00 +源地址00 5A 00 +固定00) +返回功能码01 02 +正常结束00 00)到这里,准备工作已经完成的差不多了,开始设计程序。框架如下:
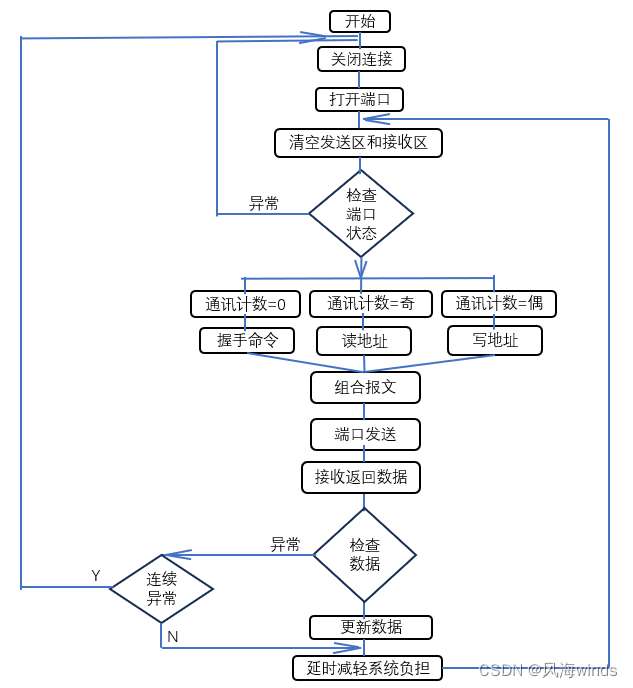
三、编写代码
以下附上我写的尝试实现Omron_FinsTCP的Epson机器人程序。
'######## 程序说明 ########
'尝试构建FinsTcp协议与Omron PLC通讯,固定读取DM300+5个字和写入DM310+5个字
'######## 程序开始 ########
'#### 声明变量 ####
UByte RDM_Data(10) '保存读取到的数据,分成高低字节,便于其他程序中使用
UByte WDM_Data(10) '缓存要发送的数据,分成高低字节,便于其他程序中更改
UByte SendDataByte(50) '允许最大发送256byte数据,本程序只写5个字地址,所以最多发送44byte数据
UByte RcevDataByte(50) '允许最大接收256byte数据,本程序只读5个字地址,所以最多接收40byte数据
UShort CountCom '用于统计通讯次数(0~65535)
UShort CountErr '用于统计通讯失败次数(不允许超过3次)
UByte i '用于批量删改数组内的数据
UByte j '用于批量打印数组内的数据
UByte Epson_ip4 'Epson机器人的网络节点(IP第四位)
UByte Omron_ip4 'Omron PLC的网络节点(IP第四位)
UShort RDM_StartAddL, RDM_StartAddH '读取DM区的起始地址,拆成两个字节
UShort WDM_StartAddL, WDM_StartAddH '写入DM区的起始地址,拆成两个字节
UByte RDM_number '读取DM区的地址数量
UByte WDM_number '写入DM区的地址数量
Function main'#### 通讯设置 ####'机器人的IP为192.168.250.97(客户端),PLC的IP为192.168.250.90(服务器)'SetNet #208, "192.168.250.90", 9600, CR, NONE, 0 '设置TCP/IP端口参数,只执行一次Epson_ip4 = 97 '以下97用十六进制0x61表示Omron_ip4 = 90 '以下90用十六进制0x5A表示RDM_StartAddH = &H01 '本程序中需要读DM300+5个字,所以起始地址为300(0x012C)RDM_StartAddL = &H2CWDM_StartAddH = &H01 '本程序中需要写DM310+5个字,所以起始地址为310(0x0136)WDM_StartAddL = &H36RDM_number = 5 '本程序中读5个字WDM_number = 5 '本程序中写5个字'#### 重新连接 ####Tag_ResetNet:Print "开始连接"CloseNet #208 '关闭208端口Wait 1 '延时1sCountCom = 0 '清空通讯相关计数CountErr = 0OpenNet #208 As Client '打开端口WaitNet #208 '等待208网络端口连接成功Print "连接成功"'#### 清空接收区 ####Tag_ClearRecv:i = 0Do While i < 50RcevDataByte(i) = 0 '清空接收区数据SendDataByte(i) = 0 '清空发送区数据i = i + 1Loop'#### 检测端口 ####Tag_CheckNet:If ChkNet(208) = -3 ThenPrint "网络异常"GoTo Tag_ResetNETEndIf'#### 发送FinsTCP代码Tag_SendMessages:If CountCom = 0 Then '第一次请先握手Print "握手 ="'以HEX发送:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 0C +命令码00 00 00 00 +错误码00 00 00 00) +Fins数据(主机地址00 00 00 61)SendDataByte(0) = &H46; SendDataByte(1) = &H49; SendDataByte(2) = &H4E; SendDataByte(3) = &H53 'FINS标识SendDataByte(4) = &H00; SendDataByte(5) = &H00; SendDataByte(6) = &H00; SendDataByte(7) = &H0C '报文长度SendDataByte(8) = &H00; SendDataByte(9) = &H00; SendDataByte(10) = &H00; SendDataByte(11) = &H00 '握手命令码SendDataByte(12) = &H00; SendDataByte(13) = &H00; SendDataByte(14) = &H00; SendDataByte(15) = &H00 '错误码SendDataByte(16) = &H00; SendDataByte(17) = &H00; SendDataByte(18) = &H00; SendDataByte(19) = Epson_ip4 '主机网络节点WriteBin #208, SendDataByte(), 20 '指定端口以bin类型发送20字节数据'若正常以HEX接收:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 10 +命令码00 00 00 01 +错误码00 00 00 00)+Fins数据(主机地址00 00 00 61 +从机地址00 00 00 5A)i = 24 '如果通讯正常会返回24字节的数据j = 0 '跳转到握手结果校验ElseIf CountCom Mod 2 = 1 Then '奇数次通讯为读地址代码,读DM300+5Print "读地址"'以HEX发送:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 1A +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定80 00 02 +目标地址00 5A 00 +源地址00 61 00 +固定00) +读功能码01 01 +访问存储区82 + 访问起始地址01 2C +固定00 +访问数量 00 05)SendDataByte(0) = &H46; SendDataByte(1) = &H49; SendDataByte(2) = &H4E; SendDataByte(3) = &H53 'FINS标识SendDataByte(4) = &H00; SendDataByte(5) = &H00; SendDataByte(6) = &H00; SendDataByte(7) = &H1A '报文长度SendDataByte(8) = &H00; SendDataByte(9) = &H00; SendDataByte(10) = &H00; SendDataByte(11) = &H02 '数据命令码SendDataByte(12) = &H00; SendDataByte(13) = &H00; SendDataByte(14) = &H00; SendDataByte(15) = &H00 '错误码SendDataByte(16) = &H80; SendDataByte(17) = &H00; SendDataByte(18) = &H02; SendDataByte(19) = &H00 'Fins头SendDataByte(20) = Omron_ip4; SendDataByte(21) = &H00; SendDataByte(22) = &H00; SendDataByte(23) = Epson_ip4 '目标地址和源地址SendDataByte(24) = &H00; SendDataByte(25) = &H00; SendDataByte(26) = &H01; SendDataByte(27) = &H01 '读功能码SendDataByte(28) = &H82; SendDataByte(29) = RDM_StartAddH; SendDataByte(30) = RDM_StartAddL; SendDataByte(31) = &H00 '访问DM区+起始地址SendDataByte(32) = &H00; SendDataByte(33) = RDM_number '访问地址数量WriteBin #208, SendDataByte(), 34 '指定端口以bin类型发送34字节数据'若正常以HEX接收:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 20 +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定C0 00 02 +目标地址00 61 00 +源地址00 5A 00 +固定00) +返回功能码01 01 +固定00 00 + 数据1 +数据2 +数据3 +数据4 +数据5)i = 30 + (RDM_number * 2) '如果通讯正常会返回(固定头部30+RDM_number * 2)个字节的数据j = 1 '跳转到读地址结果校验Else '偶数次通讯为写地址代码,写DM310+5Print "写地址"'以HEX发送:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 24 +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定80 00 02 +目标地址00 5A 00 +源地址00 61 00 +固定00) +写功能码01 02 +访问存储区82 + 访问起始地址01 36 +固定00 +访问数量 00 05 +数据1 +数据2 +数据3 +数据4 +数据5)SendDataByte(0) = &H46; SendDataByte(1) = &H49; SendDataByte(2) = &H4E; SendDataByte(3) = &H53 'FINS标识SendDataByte(4) = &H00; SendDataByte(5) = &H00; SendDataByte(6) = &H00; SendDataByte(7) = 26 + WDM_number * 2 '报文长度SendDataByte(8) = &H00; SendDataByte(9) = &H00; SendDataByte(10) = &H00; SendDataByte(11) = &H02 '数据命令码SendDataByte(12) = &H00; SendDataByte(13) = &H00; SendDataByte(14) = &H00; SendDataByte(15) = &H00 '错误码SendDataByte(16) = &H80; SendDataByte(17) = &H00; SendDataByte(18) = &H02; SendDataByte(19) = &H00 'Fins头SendDataByte(20) = Omron_ip4; SendDataByte(21) = &H00; SendDataByte(22) = &H00; SendDataByte(23) = Epson_ip4 '目标地址和源地址SendDataByte(24) = &H00; SendDataByte(25) = &H00; SendDataByte(26) = &H01; SendDataByte(27) = &H02 '写功能码SendDataByte(28) = &H82; SendDataByte(29) = WDM_StartAddH; SendDataByte(30) = WDM_StartAddL; SendDataByte(31) = &H00 '访问DM区+起始地址SendDataByte(32) = &H00; SendDataByte(33) = WDM_number '访问地址数量i = 0j = 34 '固定FinsTcp写代码发送数据的头部字节数Do While i < (WDM_number * 2) '写入数据的字节数,(WDM_number * 2)SendDataByte(j) = WDM_Data(i)i = i + 1j = j + 1Loop'Print "写地址发送字节数j = ", jWriteBin #208, SendDataByte(), j '指定端口以bin类型发送44字节数据,j = (34 + WDM_number * 2)'若正常以HEX接收:FinsTCP头(FINS标识46 49 4E 53 +报文长度00 00 00 16 +命令码00 00 00 02 +错误码00 00 00 00) +Fins数据(Fins头(固定C0 00 02 +目标地址00 61 00 +源地址00 5A 00 +固定00) +返回功能码01 02 +正常结束00 00)i = 30 '如果通讯正常会返回30字节的数据j = 2 '跳转到写地址结果校验EndIf'#### 解析返回数据 ####Tag_ParsingRcvDatas:Wait 0.1 '延时0.1s,减轻系统负担'Print "接收字节数i =", iReadBin #208, RcevDataByte(), i '以bin类型读取指定端口接收到的i字节数据'Print "返回数据 = ", RcevDataByte(7), RcevDataByte(20), RcevDataByte(23), RcevDataByte(27)'Print "CountCom = ", CountComIf j = 0 And RcevDataByte(7) = (24 - 8) And RcevDataByte(19) = Epson_ip4 And RcevDataByte(23) = Omron_ip4 Then '核对返回数据长度和主从机IPPrint "握手成功"CountErr = 0ElseIf j = 1 And RcevDataByte(7) = (i - 8) And RcevDataByte(20) = Epson_ip4 And RcevDataByte(23) = Omron_ip4 And RcevDataByte(27) = &H01 Then '核对返回数据长度、主从机IP和读功能码CountErr = 0i = 0j = 30 '固定FinsTcp读代码返回数据的头部字节数Do While i < (WDM_number * 2) '有效数据的字节数RDM_Data(i) = RcevDataByte(j) '将接收到的有效数据保存到RDM_Data(),方便其他程序使用i = i + 1j = j + 1LoopPrint "地址读取=", RDM_Data(0), RDM_Data(1), RDM_Data(2), RDM_Data(3), RDM_Data(4), RDM_Data(5), RDM_Data(6), RDM_Data(7), RDM_Data(8), RDM_Data(9)ElseIf j = 2 And RcevDataByte(7) = (30 - 8) And RcevDataByte(20) = Epson_ip4 And RcevDataByte(23) = Omron_ip4 And RcevDataByte(27) = &H02 Then '核对返回数据长度、主从机IP和写功能码CountErr = 0Print "地址写入=", WDM_Data(0), WDM_Data(1), WDM_Data(2), WDM_Data(3), WDM_Data(4), WDM_Data(5), WDM_Data(6), WDM_Data(7), WDM_Data(8), WDM_Data(9)ElseCountErr = CountErr + 1Print "返回数据异常CountErr =", CountErrEndIf'#### 通讯测试,成功后请删除本段 ####'##把读取到的数据又发送出去 '(Epson) RDM_Data <--- DM300 (Omron)WDM_Data(0) = RDM_Data(0) ' || WDM_Data(1) = RDM_Data(1) ' WDM_Data ----> DM310WDM_Data(2) = RDM_Data(2)WDM_Data(3) = RDM_Data(3)WDM_Data(4) = RDM_Data(4)WDM_Data(5) = RDM_Data(5)WDM_Data(6) = RDM_Data(6)WDM_Data(7) = RDM_Data(7)WDM_Data(8) = RDM_Data(8)WDM_Data(9) = RDM_Data(9)'#### 单次通讯结束 ####If CountErr < 3 ThenIf CountCom < 65535 Then 'Epson数据溢出会报错CountCom = CountCom + 1 '通讯次数自增1ElseCountCom = 1EndIfGoTo Tag_CheckNet '跳转至网络检查ElseGoTo Tag_ResetNET '跳转至网络重启EndIf
Fend四、编译、运行与调试
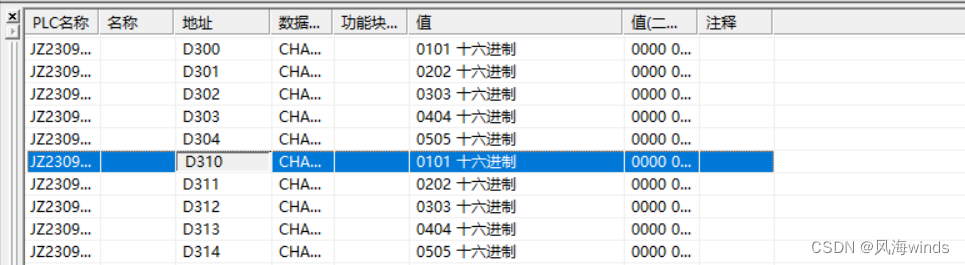
为了测试通讯成功后能否正常读写PLC地址,所以在机器人程序中添加了一段代码,不断把读取到的数值写入到另一组地址(将读取到的D300~D304中的值写入到D310~311地址),这样方便在PLC侧查看与更改数据,测试如下:
测试一:PLC 地址内的数据:
Epson机器人侧读取和写入的数据: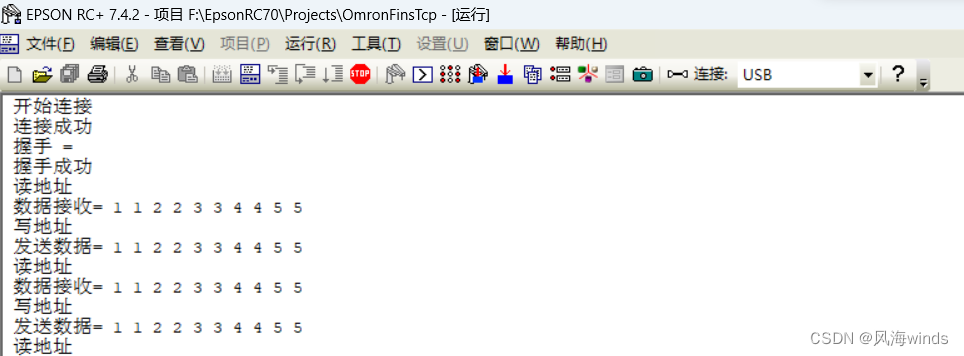
测试二:PLC 地址内的数据: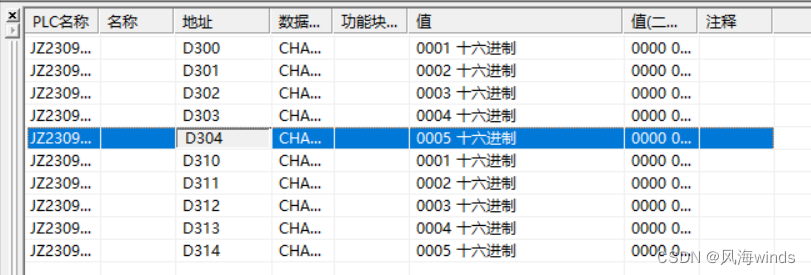
Epson机器人侧读取和写入的数据:
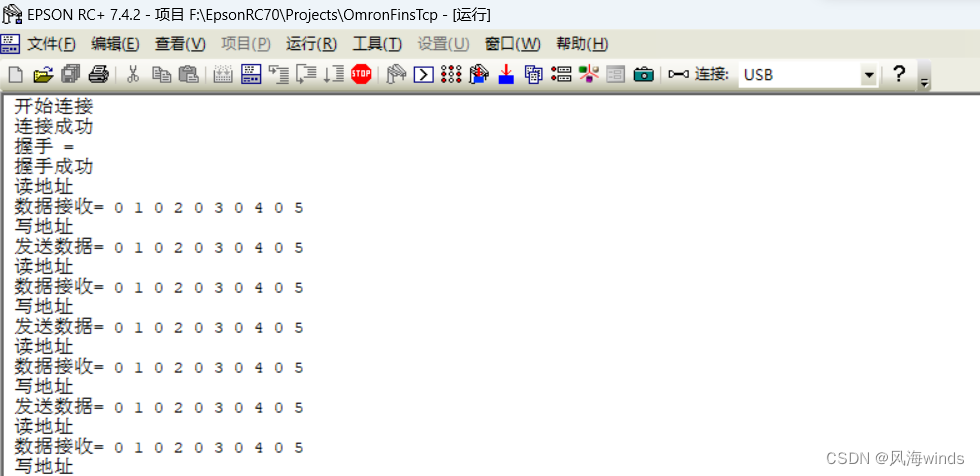
需要注意的是,由于发送和接收数据的长度单位为byte,所以D300~D304共5个字的数据被拆分成高低字节保存在一个byte类型的数组中,即占用RDM_Data(0)~RDM_Data(9),共10个元素,且存放顺序是先高字节后低字节。
五、其他说明
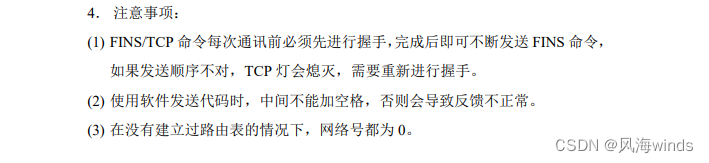
1、注意事项:
2、上面程序还有BUG,目前有已知两个:一是通讯过程中拔掉网线,机器人程序在执行读端口指令(ReadBin #)时,会报错并直接终止程序;二是程序设计成数据异常超过3次便重启端口,但实际测试中程序会在执行关闭端口(CloseNet #)、打开端口(OpenNet #)或等待端口(WaitNet #)这三个命令中的某一个时假死,我觉得更可能是等待端口那个指令,也许异常超过3次时不重启端口,直接重新握手会更好。
3、由于项目上精简机器人与PLC的交互数量后,机器人的标准IO足够用(最多支持24bit的输入、16bit的输出),所以后期程序全部改走标准IO交互了,没用到上面的通讯程序,故没再继续优化与测试。
这篇关于Epson机器人发送Fins TCP 命令读写欧姆龙PLC数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




