distribution专题

rosdep问题 pkg_resources.DistributionNotFound: The 'rosdistro=0.7.5' distribution
问题1 rosdep出现错误 pkg_resources.DistributionNotFound: The 'rosdistro>=0.7.5' distribution 解决方法 pip install rosdistro==0.7.5 -i https://pypi.tuna.tsinghua.edu.cn/simple 问题2 roscore出现错误 Invalid <par

【译】PCL官网教程翻译(22):全局对齐空间分布(GASD)描述符 - Globally Aligned Spatial Distribution (GASD) descriptors
英文原文查看 全局对齐空间分布(GASD)描述符 本文描述了全局对齐的空间分布(GASD)全局描述符,用于有效的目标识别和姿态估计。 GASD基于表示对象实例的整个点云的参考系的估计,该实例用于将其与正则坐标系对齐。然后,根据对齐后的点云的三维点在空间上的分布情况计算其描述符。这种描述符还可以扩展到整个对齐点云的颜色分布。将匹配点云的全局对齐变换用于目标姿态的计算。更多信息请参见GASD。

Introduction to the t Distribution (non-technical)
https://www.youtube.com/watch?v=Uv6nGIgZMVw
vue 中 dist文件夹静态是什么意思(distribution)
Vue打包为dist的命名并没有固定规定,dist是一个缩写词,代表distribution(分发、发布)的意思。在Vue项目中,将源代码经过编译、压缩等处理后打包为dist目录,是为了方便将项目部署到生产环境中。 具体来说,dist目录包含了经过压缩、优化、合并等处理后的HTML、CSS、JavaScript等静态资源文件。这些文件可以直接被浏览器加载和解析,以呈现最终的网页效果。 打包

长尾分布(Long-tailed Distribution)
长尾分布( L o n g − t a i l e d D i s t r i b u t i o n Long-tailed\ Distribution Long−tailed Distribution)是统计学和概率论中的一个重要概念,用于描述一组数据中尾部(即远离均值的部分)包含了相对较多极端值的情况。以下是对长尾分布的详细解释: 定义 长尾分布是重尾分布的一个子类型,其特点是分布的尾部
[Codeforces - Gym10081D (NEERC)] Distribution in Metagonia (构造+数的拆分)
Codeforces - Gym10081D (NEERC) 给定一个数,将其变成若干个数的和 如果这些数有因子,那么只能是 2或 3 并且这些数两两不能除尽 构造题 如果这个数为 1,那么答案就为 1 若不为 1,那么如果他是奇数 那么我减去最大的一个 3次幂转化为一个偶数, 再不断地提出 2,变成一个奇数,循环直到其变为 1 所以这个数 N=3a1+2b1(3a2

(论文翻译)ViM Out-Of-Distribution with Virtual-logit Matching(CVPR2022)
ViM: Out-Of-Distribution with Virtual-logit Matching(CVPR2022) 文章目录 ViM: Out-Of-Distribution with Virtual-logit Matching(CVPR2022)Abstract1.Introduction2.Related Work3.Motivation: The Missing Info
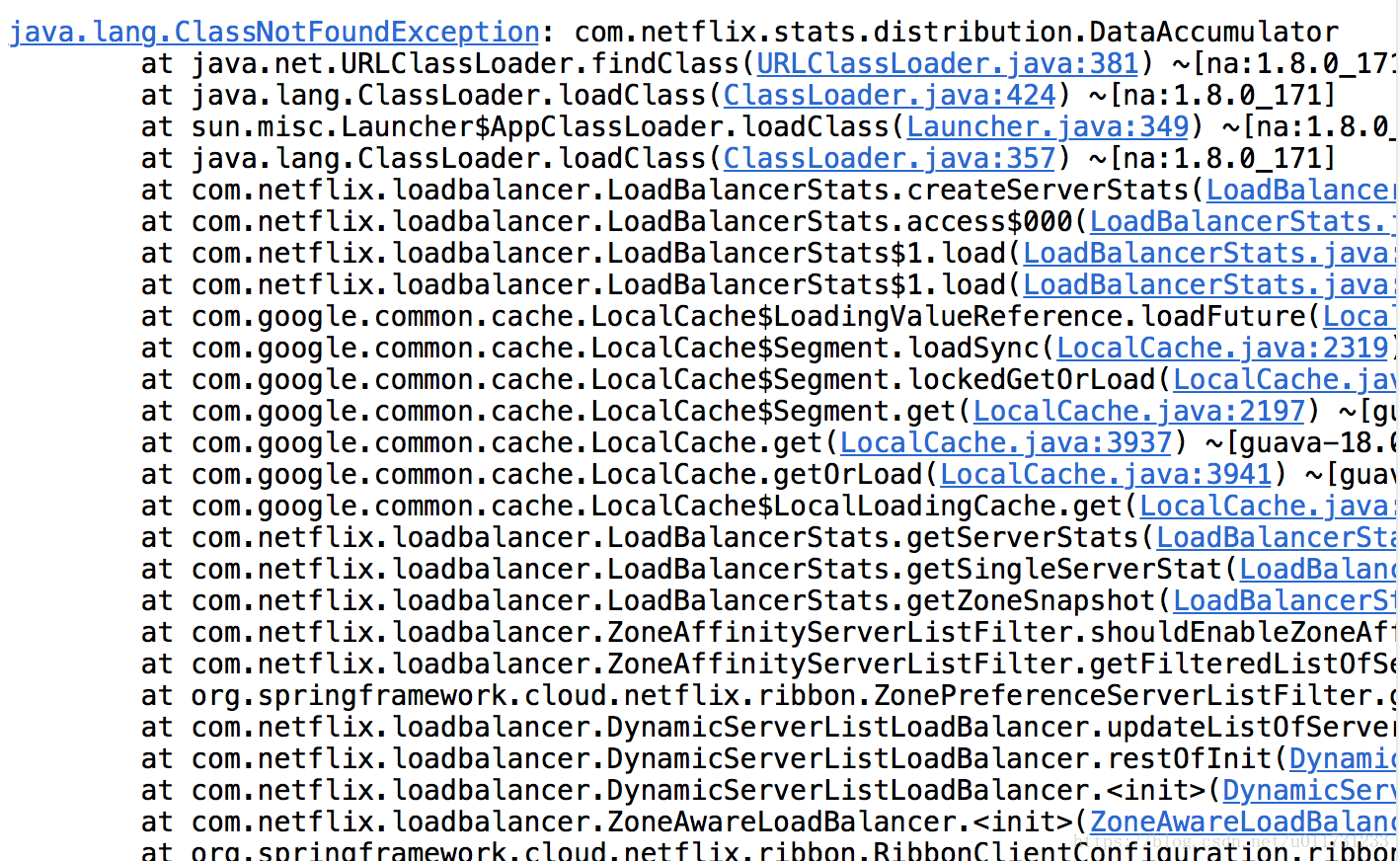
java.lang.NoClassDefFoundError: com/netflix/stats/distribution/DataAccumulator
SpringCloud微服务项目接口返回 后台控制台 缺少文件DataAccumulator,没在maven镜像中找到,已上传netflix-statics jar包

No matching distribution found for keras-nightly~=2.5.0.dev
安装pip install tensorflow==2.5.0的时候报错: No matching distribution found for keras-nightly~=2.5.0.dev 解决办法: pip install tensorflow-gpu==2.5.0 -i https://pypi.org/simple/
hdu 5291 Candy Distribution(dp)
题目链接:hdu 5291 Candy Distribution 每次先计算出dp[0],然后根据dp[0]的数值可以用o(1)的复杂度算出dp[1],以此类推。总体复杂度为o(200 * 80000),可以接受。 #include <cstdio>#include <cstring>#include <algorithm>using namespace std;cons
【Python】【报错解决】【无法安装socket库】No matching distribution found for socket
一、问题描述 如下图,笔者在做一个安全相关的项目时,遇到如下报错: No matching distribution found for socket 在尝试安装socket(套接字)库时报错,报错代码: pip install socket 二、原因及解决 报错原因:socket(套接字)库为Python的内置库,在笔者的Python 3.11环境中已经存在,无需再次安装。 成功运行的

Your account already has a valid iOS Distribution certificate!问题解决
- 出现下图提示的错误提供了两种解决方式,一个是把之前的发布证书导出来拿到你发布的mac上用,目前采用第二种方式处理直接删除之前的重新申请发布证书1.- 登陆发开发者中心,删除一个发布证书2.- 然后按照正常的发布证书申请流程就行申请3.- 最后回来Xcode提交打包文件 问题截图,其实上门已经有解决方案2种 1.- 登陆发开发者中心,删除一个发布证书 开发者账号发布证
PRML读书笔记(2)——Probability Distribution
2 Probability Distributions \qquad本章主要介绍了机器学习中常用的一些分布,以及分布的性质,包括:二元变量分布、多元变量分布、高斯分布、指数族以及非参方法(核密度方法以及最近邻方法)。 2.1 伯努利分布 \qquad设二元变量 x∈0,1 x∈{0,1}服从伯努利分布,则有伯努利分布: Bern[x|u]=ux(1−u)1−x Bern
Out-of-Distribution Detection with Semantic Mismatch under Masking
Out-of-Distribution Detection with Semantic Mismatch under Masking 摘要引言2 相关工作2.1 现有的OOD检测方法2.2基于重构的面向对象检测2.3利用外部OOD数据进行OOD检测2.4 开放集合识别 Mismatch under Masking) 摘要 本文提出了一种名为MoodCat的新型分布之外(O
经验分布(Empirical Distribution)的定义
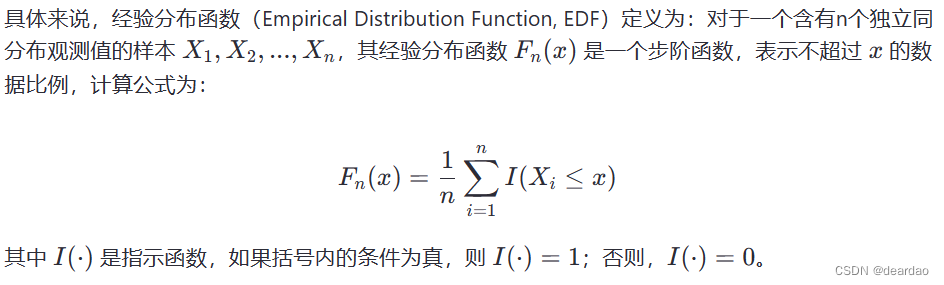
经验分布(Empirical Distribution)是指基于实际观测数据构建的分布,也称为样本分布或观察分布。在统计学中,当分析一个数据集时,可以通过观察数据点的频率或比例来估计数据的分布情况,而无需事先假设数据遵循某一特定类型的理论分布(如正态分布、泊松分布等)。 简而言之,经验分布直接反映了数据的实际分布特性,是数据本身特征的一种非参数描述,常用于探索性数据分析、检验假设、或作为理论分

Denoising diffusion models for out-of-distribution detection
Denoising diffusion models for out-of-distribution detection 摘要1 介绍2 相关工作2.1 基于生成得方法2.2 基于重构的方法 3 方法3.1.扩散模型3.2.多次重建3.3.相似性评估4实验4.1. Experimental details 4.2. Results for computer vision datasets4.
SaS稳定分布函数(symmetric D -stable distribution)
alpha为指数参数,beta为对称参数,gamma为尺度参数或分度参数(dispersion parameter),delta为本地参数 stblrnd(alpha,beta,gamma,delta,varargin)

von Mises-Fisher Distribution (代码解析)
torch.distribution 中包含了很多概率分布的实现,本文首先通过均匀分布来说明 Distribution 的具体用法, 然后再解释 von Mises-Fisher 分布的实现, 其公式推导见 von Mises-Fisher Distribution. 1. torch.distribution.Distribution 以下是 Uniform 的源码: class Unif
Digital Signage Broadcasting: Content Management and Distribution Techniques
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Digital Signage Broadcasting is a perfect introduction to this new world of opportunities for media pro
【概率论】5-3:超几何分布(The Hypergeomtric Distribution)
原文地址1:https://www.face2ai.com/Math-Probability-5-3-The-Hypergeomtirc-Distribution转载请标明出处 Abstract: 本文主要介绍超几何分布 Keywords: Hypergeomtirc Distribution,Finite Population Correction 超几何分布 实力这个东西是不能被完全表现出
【概率论】5-1:分布介绍(Special Distribution Introduction)
原文地址1:https://www.face2ai.com/Math-Probability-5-1-Special-Distributions转载请标明出处 Abstract: 本文介绍本章关于分布的内容提要 Keywords: Distribution 各分布介绍 这篇就是个介绍,会非常短,但是还是有点点信息在里面的比如,给了一个分布的家族分类。 我们知道一个随机变量的全部信息都在其分部里
Property Distribution Aizu - 0118
题目: タナカ氏が HW アールの果樹園を残して亡くなりました。果樹園は東西南北方向に H × W の区画に分けられ、区画ごとにリンゴ、カキ、ミカンが植えられています。タナカ氏はこんな遺言を残していました。 果樹園は区画単位でできるだけ多くの血縁者に分けること。ただし、ある区画の東西南北どれかの方向にとなりあう区画に同じ種類の果物が植えられていた場合は、区画の境界が分からないのでそれらは 1
No matching distribution found for yaml
错误信息: 直接pip install yaml了或者直接conda install yaml,导致报错: Could not find a version that satisfies the requirement yaml (from versions: ) No matching distribution found for yaml 错误原因: python3里面yaml的名字叫做py
VRP and related algorithms for logistics distribution综述的笔记
选了些自己感兴趣的。 车辆路径问题(VRP)是当今物流公司面临的最关键挑战之一。自1959年丹齐格和兰姆泽(1959年)介绍了卡车调度问题以来,研究人员一直在研究车辆路由和交付调度。它被认为是车辆路径问题(VRP)的范例,并且涉及从中央仓库到地理分散的客户的货物配送。 自那时以来,已经引入了影响该问题的几个因素,例如车辆容量的变化,与时间相关的限制,即由客户设置的时间窗口,以及涉
variational approximation posterior distribution (变分近似)
变分近似是一种数学方法,用来近似复杂系统中难以精确计算的概率分布。在统计和机器学习领域,我们经常会遇到需要估计后验分布的情况,后验分布是指在给定观测数据后,我们对未知量(比如模型的参数)的不确定性的概率描述。 想象你有一堆数据,你想根据这些数据来猜测某些你不知道的量(比如一个事件发生的概率)。在贝叶斯统计中,你会用到后验分布来表达你的猜测。但问题在于,对于很多复杂的模型,这个后验分布非常难以直接

Ghost Target Identification by Analysis of the Doppler Distribution in Automotive Scenarios
摘要 在汽车环境中,反射表面的存在是不可避免的。从目标车辆返回的电磁波可以在这些表面上反射,从而形成不存在的所谓重影目标。对于驾驶员辅助系统,重影目标可能会导致错误决策,因此,应检测并避免它们。本文提出了一个描述这些重影目标的模型,以及利用车辆的方向和运动状态将其与真实目标区分开来的过程 介绍 为了安全地操作驾驶员辅助系统,必须清楚地识别和表征目标参数,即目标车辆的方向和尺寸。真实目标在反射