delving专题

【论文笔记】DiL-NeRF: Delving into Lidar for Neural Radiance Field on Street Scenes
原文链接:https://arxiv.org/abs/2405.00900 1. 引言 自动驾驶等应用领域需要逼真的仿真。传统的仿真流程需要手工创建3D资产并构成虚拟环境,但其人力和专业需求使其难以具有可放缩性。 NeRF有不错的仿真能力,但需要大范围覆盖的训练数据以学习潜在的几何、材料特性和光照。在自动驾驶场景中,数据覆盖很稀疏,且相机的轨迹共线。此外,路面纹理较少,进一步引入重建的模糊性
Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification
序:在ISVRC2015 on ImageNet2012 classification dataset 上,取得了4.94%的 top-5 test error,这是第一次超越了人的识别了率(5.1%). 文章提出了两个内容: (1) Parametric Rectified Linear Unit (PReLU) :使模型以接近0的额外计算代价和较小的过拟合风险训练模型。 (2) MSRA
![[深度学习论文笔记][Weight Initialization] Delving deep into rectifiers: Surpassing human-level performance](https://img-blog.csdn.net/20160920172827657?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQv/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center)
[深度学习论文笔记][Weight Initialization] Delving deep into rectifiers: Surpassing human-level performance
He, Kaiming, et al. “Delving deep into rectifiers: Surpassing human-level performance on imagenet classification.” Proceedings of the IEEE International Conference on Computer Vision. 2015. [Citations
《Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification》论文阅读笔记
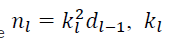
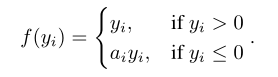
论文原文:http://arxiv.org/abs/1502.01852 论文主要讨论了以ReLU为激活函数的网络的缺陷并提出了改进的激活函数PReLU与新的Kaiming初始化方法 1. PReLU 前向传播 通道独立: f ( y i ) = max ( 0 , y i ) + a i min ( 0 , y i ) f\left(y_{i}\right)=\max \le
关于PRelu:Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification
前言 内容是经典激活函数PRelu的提出 内容 上图左为Relu,右图为PRelu,P相比传统Relu,在坐标系左边有数值。用公式解释: 当ai=0时,成为Relu;当ai是一个小且固定的数值,则变成Leaky Relu(ai=0.01),LRelu的motivation是为了防止零梯度,即坐标轴左侧有数值。但是在一些研究上,显示LRelu对于精度的影响微乎其微。 Prelu相比Rel