d435专题

【眼在手外D435相机支架】
完整UR机械臂的GRCNN抓取网络教程参考以下博客: 【眼在手外D435相机支架】 0. 【机械臂视觉抓取从理论到实战】 GRCNN抓取网络学习1【Jacquard数据集等效制作】GRCNN抓取网络学习2【自制Jacquard数据集训练】GRCNN抓取网络学习3【自制Jacquard数据集模型调优】GRCNN抓取网络学习4【手眼标定】 1.前言 在眼在手外的相机标定过程中,我们需要将D4

Inter RealSense D435安装和使用教程(ubuntu 16.04)
参考链接:https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md 该博客只针对于ubuntu16.04-LTS,14.*或者18.*的系统请参考上面的链接。 Prerequisites: 1.更新ubuntu系统和稳定版本的内核 sudo apt-get update && sudo ap
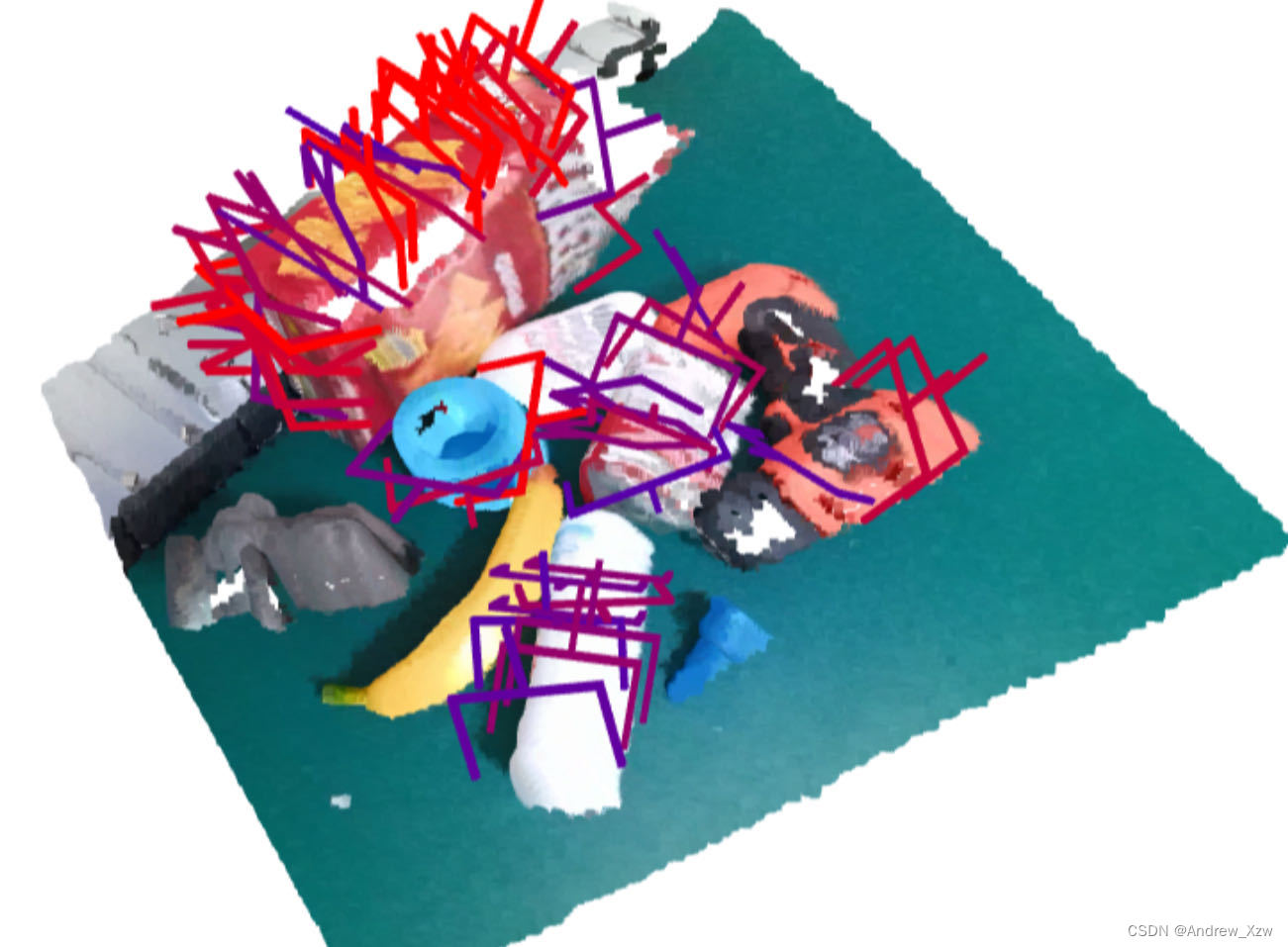
D435相机结合Yolo V8识别出目标物体,并转点云出抓取位姿。
最近项目上需要完成整个识别、定位、到最后的抓取流程。 分享一下,通过使用D435相机并结合Yolo V8识别出目标物体后,抠取出目标物体部分的有效深度图,最后将前景物体部分的RGB D435相机结合Yolo V8识别出目标物体,并转点云出抓取位姿 1、D435相机取流2、D435结合Yolo V8实时检测3、扣取指定物体的深度图3.1 扣取指定物体的mask3.2 根据mask扣取物体有效深度

D435相机内参标定(无法直接应用在相机上)
打开roscore和相机 输入 rostopic echo /camera/color/camera_info 从而得到相机的内参 cameraInfo包含D、K、R、P四个矩阵。 矩阵D是失真系数,包括(k1, k2, t1, t2, k3) 矩阵K是相机内参,即 矩阵R是一个3✖3的旋转矩阵,仅对双目相机有效,使左右极线平行。 矩阵P是投影矩阵,即,

realsense-d435结构
外观 摄像头 从左->右: 1,3:红外传感器(IR Stereo Cameral) 2:红外激光发射器(IR Projector) 4:RGB相机 物理结构拆分

opencv C++ dnn模块调用yolov5以及Intel RealSense D435深度相机联合使用进行目标检测
一、代码 #include <opencv2/opencv.hpp>#include <opencv2/dnn/dnn.hpp>#include <librealsense2/rs.hpp> // Include RealSense Cross Platform APIusing namespace cv;using namespace dnn;using namespace std;

RealSense D435 的开发日记(API 汇总)
🌞欢迎来到机器学习的世界 🌈博客主页:卿云阁 💌欢迎关注🎉点赞👍收藏⭐️留言📝 🌟本文由卿云阁原创! 🌠本阶段属于练气阶段,希望各位仙友顺利完成突破 📆首发时间:🌹2021年6月23日🌹 ✉️希望可以和大家一起完成进阶之路! 🙏作者水平很有限,如果发现错误,请留言轰炸哦!万分感谢! 目录 🍈 获得相机不同传感器之间的外参转换矩阵以及内参矩阵 🍉获取设备的传感器信息
UR10e+D435+ag95夹爪 gazebo 仿真记录(一)
学习仿真环境gazebo下利用UR10e机械臂搭建模拟平台,此博客用于记录搭建过程 搭建过程参考了很多博主的帖子和GitHub开源代码,对在此领域一起努力并且乐于分享的人表示感谢!!! 主要参考光头明明、总有一天全城的人都要高看我们和bug404_三位博主。最终自己功能包的主要参考了bug404_的ur_platform,感觉这个结构比较合理。 遵循尽量不改动GitHub下载的功能包原则方便

RealSense D435 输出世界坐标系的csv文件
第一篇博客,最近在实习,一直在做机器视觉的研究。今天简单的介绍一个RealsenseD435的应用。 RealsenseD435是一款深度摄像头,可以快读的输出深度图像。首先了解一下什么事世界坐标系,相机坐标系,和图像坐标系,这里给大家推荐一篇博客。https://blog.csdn.net/waeceo/article/details/50580607 在Viewer里我们可以很轻松地得到相
JAKA robot与D435相机连接使用及RVIZ仿真简单操作!
老规矩先创建一个新的虚拟机 这里就暂且叫做“m2"吧! 导入“Jaka_ros_driver_cpp”文件包 手眼标定整体流程导入包如下 handeye-calib: 基于ROS的手眼标定程序,支持眼在手上,眼在手外。提供完整文档。欢迎关注公众号鱼香ROS。 (gitee.com) ------------------------------------------------------