cudapcl专题

CUDAPCL ROR点云滤波
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 该方法的具体原理为输入的点云中每一个点设定一个范围(半径为r的圆),如果在该范围内没有达到某一个设定的点数值,则该数据点将会被删除,重复上述此过程直到最后一个数据点,即完成该滤波过程。 二、实现代码 ROR.cuh #ifndef ROR_GPU_CUH#define ROR_GPU_CU

CUDAPCL 点云体素下采样
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 体素下采样是指使用常规体素网格从输入点云创建均匀下采样的点云。它经常被用作许多点云处理任务的预处理步骤。该算法分为两步操作: (1)并行的将每个点分配到其所处的体素中。 (2)并行遍历所有体素,并求取每个体素中所有点的质心点。 二、实现代码 VoxelSample.cuh #ifndef VOXELS
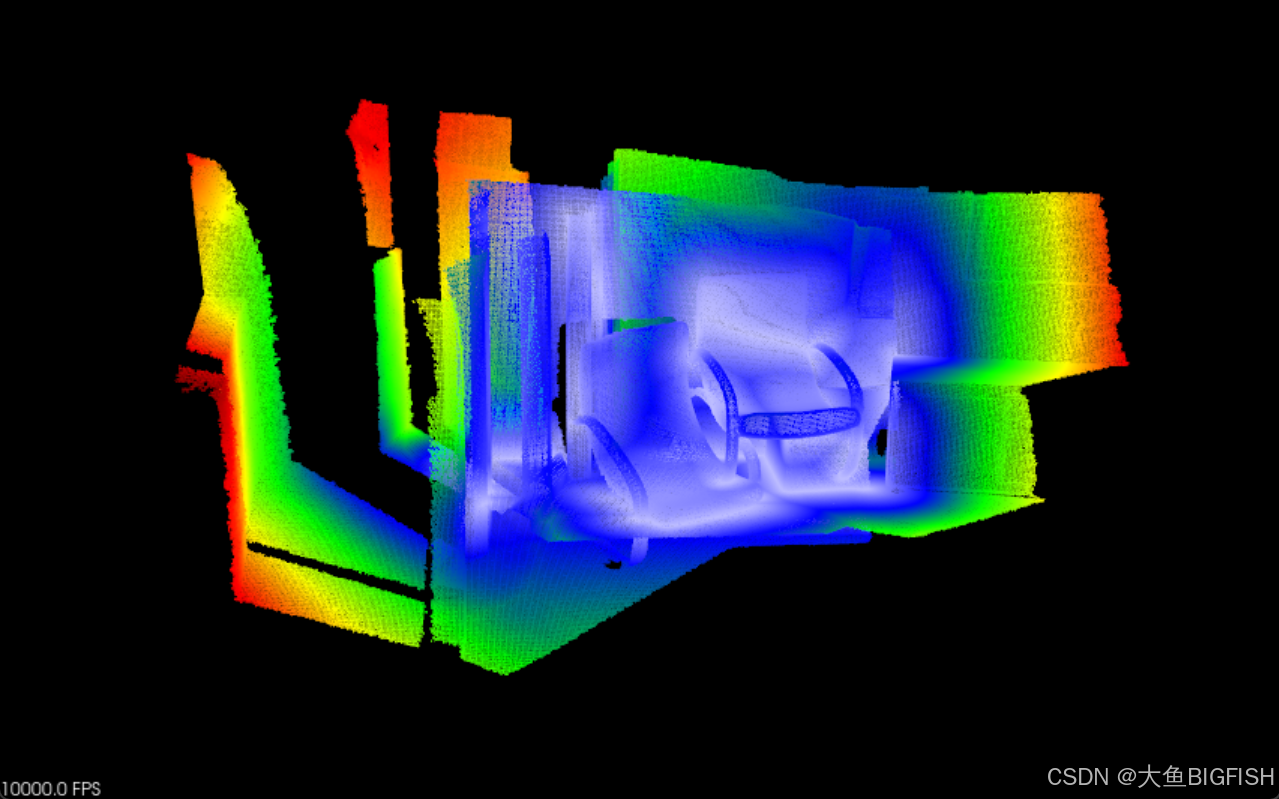
CUDAPCL 计算点云与点云之间的距离
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 这里使用CUDA实现一种计算计算点云与点云之间的欧式距离,其思路很简单,就是计算每个点到另一个点集之间的最小距离,最终保存结果到一个数组中,通过这种方式可以快速的计算出点云与点云之间的距离,这里充分利用CUDA的并行机制,并使用色带显示距离的远近关系。 二、实现代码 ComputeDistances.cuh