本文主要是介绍CUDAPCL 计算点云与点云之间的距离,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、简介
- 二、实现代码
- 三、实现效果
- 参考资料
一、简介
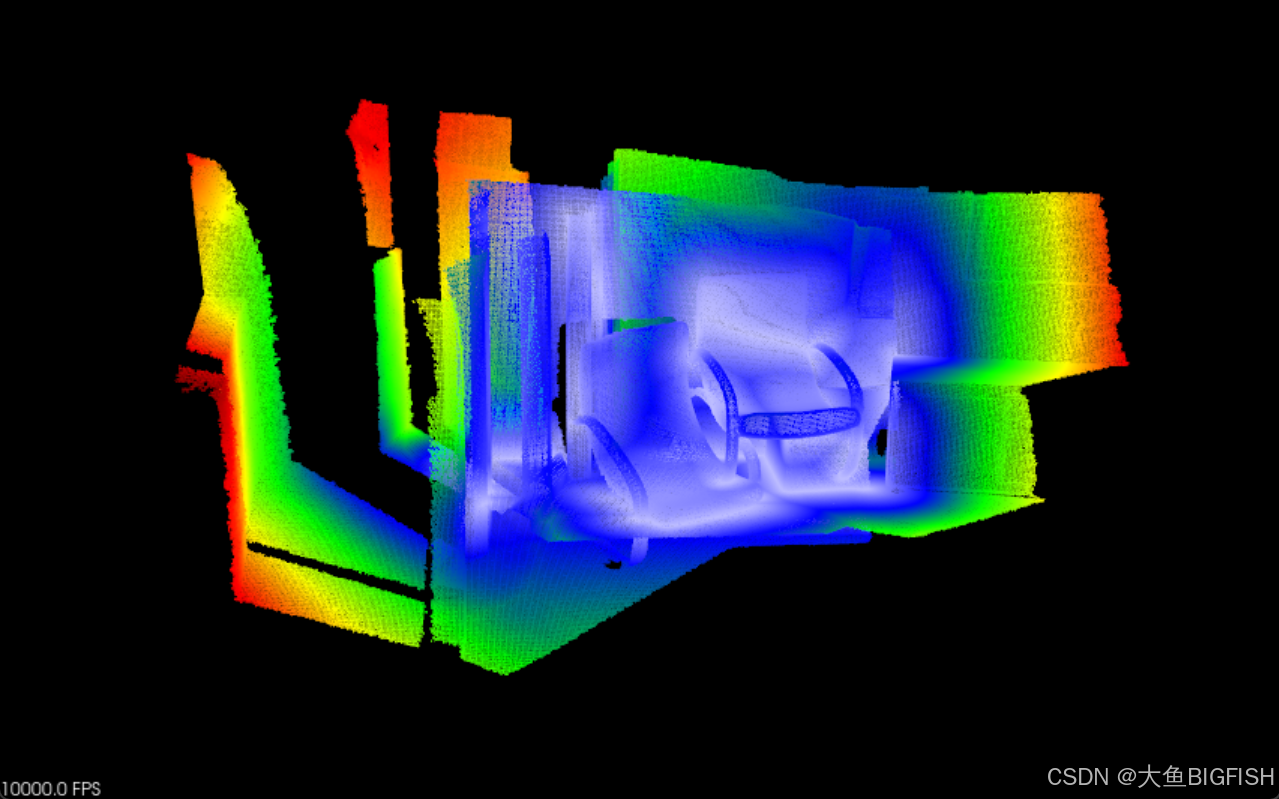
这里使用CUDA实现一种计算计算点云与点云之间的欧式距离,其思路很简单,就是计算每个点到另一个点集之间的最小距离,最终保存结果到一个数组中,通过这种方式可以快速的计算出点云与点云之间的距离,这里充分利用CUDA的并行机制,并使用色带显示距离的远近关系。
二、实现代码
ComputeDistances.cuh
#ifndef COMPUTE_DISTANCES_GPU_CUH
#define COMPUTE_DISTANCES_GPU_CUH#include <vector>
#include <math.h>
#include <Eigen/Dense>#include <cuda_runtime.h>// 主机端函数声明
void computeDisByGpu(std::vector<Eigen::Vector3f>& points1, std::vector<Eigen::Vector3f>& points2, std::vector<float>& dis1, std::vector<float>& dis2);int getCudaDeviceCount();#endif // COMPUTE_DISTANCES_GPU_CUHCalculateDistances.cu
#include "ComputeDistances.cuh"#include <cuda_runtime.h>
#include <device_launch_parameters.h>// CPU和GPU端都可以使用
struct Point3f
{float x, y, z;// 构造函数__host__ __device__ Point3f() : x(0), y(0), z(0) {}__host__ __device__ Point3f(float px, float py, float pz) : x(px), y(py), z(pz) {}// 向量加法__host__ __device__ Point3f operator+(const Point3f& p) const {return Point3f(x + p.x, y + p.y, z + p.z);}// 向量减法__host__ __device__ Point3f operator-(const Point3f& p) const {return Point3f(x - p.x, y - p.y, z - p.z);}// 标量乘法__host__ __device__ Point3f operator*(float s) const {return Point3f(x * s, y * s, z * s);}// 向量叉乘__host__ __device__ Point3f Cross(const Point3f& p) const {return Point3f(y * p.z - z * p.y, z * p.x - x * p.z, x * p.y - y * p.x);}// 向量点乘__host__ __device__ float Dot(const Point3f& p) const {return (x * p.x + y * p.y + z * p.z);}// 向量模__host__ __device__ float Module() const {return sqrtf(x * x + y * y + z * z);}
};__global__ void calculateDistances(Point3f* points1, Point3f* points2,float* dis1, float* dis2, int num1, int num2)
{// 通过 blockIdx.x 和 threadIdx.x 计算当前线程的索引 idx// ,然后分别对 points1 和 points2 中的每个点,计算它们到另一个点云中所有点的最小距离int idx = blockIdx.x * blockDim.x + threadIdx.x;if (idx < num1){float minDistance = INFINITY;for (int i = 0; i < num2; ++i){float distance = (points1[idx] - points2[i]).Module();if (distance < minDistance) {minDistance = distance;}}dis1[idx] = minDistance;}if (idx < num2){float minDistance = INFINITY;for (int i = 0; i < num1; ++i){float distance = (points2[idx] - points1[i]).Module();if (distance < minDistance) {minDistance = distance;}}dis2[idx] = minDistance;}
}void computeDisByGpu(std::vector<Eigen::Vector3f>& points1, std::vector<Eigen::Vector3f>& points2, std::vector<float>& dis1, std::vector<float>& dis2)
{int maxNum = std::max(points1.size(), points2.size());int num1 = points1.size();int num2 = points2.size();Point3f* d_points1;Point3f* d_points2;float* d_dis1;float* d_dis2;// 分配GPU设备内存cudaMalloc(&d_points1, points1.size() * sizeof(Point3f));cudaMalloc(&d_points2, points2.size() * sizeof(Point3f));cudaMalloc(&d_dis1, points1.size() * sizeof(float));cudaMalloc(&d_dis2, points2.size() * sizeof(float));// 复制数据到设备cudaMemcpy(d_points1, points1.data(), points1.size() * sizeof(Point3f), cudaMemcpyHostToDevice);cudaMemcpy(d_points2, points2.data(), points2.size() * sizeof(Point3f), cudaMemcpyHostToDevice);dim3 blockSize(256);dim3 gridSize((maxNum + blockSize.x - 1) / blockSize.x);calculateDistances <<<gridSize, blockSize>>>(d_points1, d_points2, d_dis1, d_dis2, num1, num2);cudaDeviceSynchronize();dis1.resize(num1);dis2.resize(num2);cudaMemcpy(dis1.data(), d_dis1, num1 * sizeof(float), cudaMemcpyDeviceToHost);cudaMemcpy(dis2.data(), d_dis2, num2 * sizeof(float), cudaMemcpyDeviceToHost);cudaFree(d_points1);cudaFree(d_points2);cudaFree(d_dis1);cudaFree(d_dis2);
}int getCudaDeviceCount()
{int count;cudaGetDeviceCount(&count);return count;
}ColorRamp.h
#ifndef ColorRamp_H
#define ColorRamp_H#include <array>
#include <vector>class ColorRamp
{
public:typedef std::array<unsigned char, 3> Color; //typedef std::pair<double, Color> Step; //ColorRamp(){m_steps.push_back(std::make_pair(0, Color{ 192, 192, 255 }));m_steps.push_back(std::make_pair(0.2, Color{ 0, 0, 255 }));m_steps.push_back(std::make_pair(0.4, Color{ 0, 255, 0 }));m_steps.push_back(std::make_pair(0.6, Color{ 255, 255, 0 }));m_steps.push_back(std::make_pair(0.8, Color{ 255, 0, 0 }));m_steps.push_back(std::make_pair(1.0, Color{ 128, 0, 0 }));}//Color get(double value) const{if (value < 0.0f) value = 0.0f;if (value > 1.0f) value = 1.0f;std::size_t idx = 0;while (m_steps[idx + 1].first < value)++idx;double v0 = m_steps[idx].first;double v1 = m_steps[idx + 1].first;const Color& c0 = m_steps[idx].second;const Color& c1 = m_steps[idx + 1].second;double ratio = (value - v0) / (v1 - v0);Color out;for (std::size_t i = 0; i < 3; ++i)out[i] = static_cast<unsigned char>((1 - ratio) * c0[i] + ratio * c1[i]);return out;}private:std::vector<Step> m_steps;
};#endif // ColorRamp_Hmain.cpp
#include <vector>
#include <iostream>#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>#include <Eigen/Core>// 引入CUDA相关头文件
#include "ComputeDistances.cuh"
#include "ColorRamp.h"// 使用PCL读取点云并转换为Eigen::Vector3f的格式
void convertPCLToEigen(pcl::PointCloud<pcl::PointXYZ>::Ptr pcl_cloud, std::vector<Eigen::Vector3f>& eigen_points) {eigen_points.clear();for (const auto& point : pcl_cloud->points){eigen_points.emplace_back(point.x, point.y, point.z);}
}int main()
{// ---------------------------------------读取数据----------------------------------const std::string fileName1 = R"(C:\Users\23547\Desktop\TEST\data\DemoICPPointClouds\cloud_bin_0.pcd)";const std::string fileName2 = R"(C:\Users\23547\Desktop\TEST\data\DemoICPPointClouds\cloud_bin_2.pcd)";pcl::PointCloud<pcl::PointXYZ>::Ptr cloud1(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile(fileName1, *cloud1) == -1) {std::cerr << "Couldn't read file cloud1.pcd" << std::endl;return -1;}// 加载第二个点云pcl::PointCloud<pcl::PointXYZ>::Ptr cloud2(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile(fileName2, *cloud2) == -1) {std::cerr << "Couldn't read file cloud2.pcd" << std::endl;return -1;}// 将PCL点云转换为Eigen::Vector3f的格式std::vector<Eigen::Vector3f> points1, points2;convertPCLToEigen(cloud1, points1);convertPCLToEigen(cloud2, points2);// 存储结果的容器std::vector<float> dis1, dis2;// 调用CUDA函数进行距离计算computeDisByGpu(points1, points2, dis1, dis2);//---------------------------------------可视化----------------------------------float minVal = std::numeric_limits<float>::max();float maxVal = -std::numeric_limits<float>::min();for (float d : dis1){if (minVal > d) minVal = d;if (maxVal < d) maxVal = d;}for (float d : dis2){if (minVal > d) minVal = d;if (maxVal < d) maxVal = d;}ColorRamp cr;float range = maxVal - minVal;pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloudRGB1(new pcl::PointCloud<pcl::PointXYZRGB>);cloudRGB1->resize(dis1.size());for (int i = 0; i < dis1.size(); ++i){double value = (dis1[i] - minVal) / range;ColorRamp::Color color = cr.get(value);cloudRGB1->points[i].x = cloud1->points[i].x;cloudRGB1->points[i].y = cloud1->points[i].y;cloudRGB1->points[i].z = cloud1->points[i].z;cloudRGB1->points[i].r = color[0];cloudRGB1->points[i].g = color[1];cloudRGB1->points[i].b = color[2];}cloudRGB1->width = cloudRGB1->size();cloudRGB1->height = 1;cloudRGB1->is_dense = true;pcl::io::savePCDFileASCII("cloud1.pcd", *cloudRGB1);pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloudRGB2(new pcl::PointCloud<pcl::PointXYZRGB>);cloudRGB2->resize(dis2.size());for (int i = 0; i < dis2.size(); ++i){double value = (dis2[i] - minVal) / range;ColorRamp::Color color = cr.get(value);cloudRGB2->points[i].x = cloud2->points[i].x;cloudRGB2->points[i].y = cloud2->points[i].y;cloudRGB2->points[i].z = cloud2->points[i].z;cloudRGB2->points[i].r = color[0];cloudRGB2->points[i].g = color[1];cloudRGB2->points[i].b = color[2];}cloudRGB2->width = cloudRGB2->size();cloudRGB2->height = 1;cloudRGB2->is_dense = true;pcl::io::savePCDFileASCII("cloud2.pcd", *cloudRGB2);auto ShowPointCloud = [](pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud1, pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud2){boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Windows"));viewer->setBackgroundColor(0, 0, 0);viewer->addPointCloud<pcl::PointXYZRGB>(cloud1, "cloud1");viewer->addPointCloud<pcl::PointXYZRGB>(cloud2, "cloud2");viewer->spin();};ShowPointCloud(cloudRGB1, cloudRGB2);return 0;
}三、实现效果
参考资料
[1]https://bigfish.blog.csdn.net/article/details/141615277?spm=1001.2014.3001.5502
这篇关于CUDAPCL 计算点云与点云之间的距离的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






