corner专题

Harris Corner Detector 公式推导以及具体含义
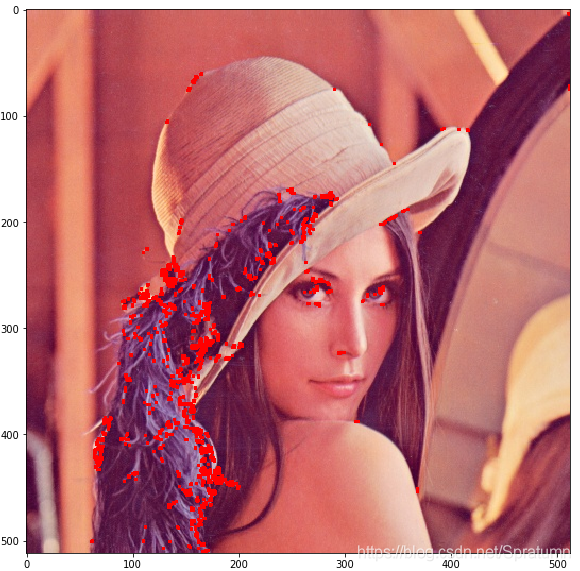
在做图像匹配时,常需要对两幅图像中的特征点进行匹配。为了保证匹配的准确性,所选择的特征必须有其独特性,角点可以作为一种不错的特征。 那么为什么角点有其独特性呢?角点往往是两条边缘的交点,它是两条边缘方向变换的一种表示,因此其两个方向的梯度变换通常都比较大并且容易检测到。 这里我们理解一下Harris Corner 一种角点检测的算法 角点检测基本原理: 人们通常通过在一个小的窗口

Corner case 数据处理方法
背景 特斯拉的纯视觉处理方法,在处理corner case的过程中,面对着数据量少,而且难以采集的问题。为了提升模型的数据量,通过一定的数据处理方法进行corner case的数据生成,不失为一种有效的办法。 "Corner case" 通常指的是在数据集中相对较少见或特殊的情况,这些情况可能对于模型的训练和测试至关重要,因为它们有助于模型更全面地理解问题空间。在图像识别任务中,corner

How to hide my site and my document link in the right-top corner of sharepoint 2010
SharePoint 2010: hide my site and my document link 1. open the site center and click “Manage service applications”. 2. click “Manage service applications”. 3. click “Manage User Permissions”

HDU 2438 Turn the corner 三分
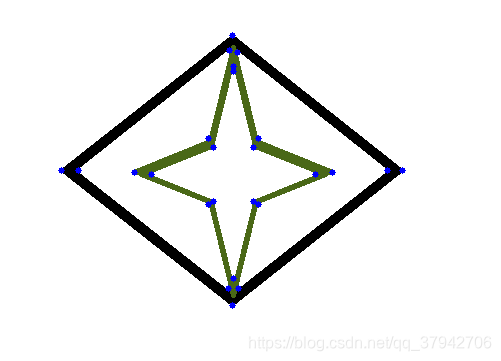
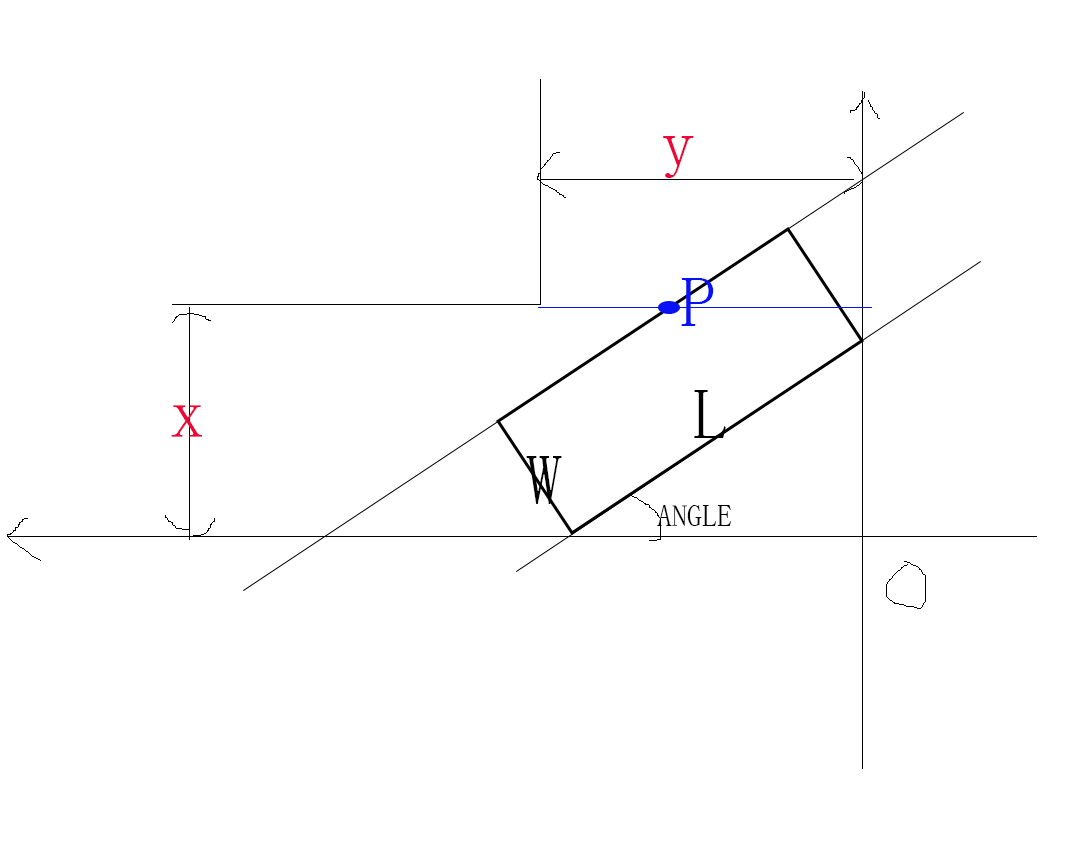
题意:给一些几何数据,问车能不能过去。 想法: 由图可知,只要先确定y0=Y,那么可以求得x0然后比较x0和-Y的大小,如果x0大于-Y,表示可以通过这个角度。 #include<iostream>#include<cstdio>#include<cstring>#include<cmath>#define pi acos(-1.0)#define eps 1e-9

一些C语言的dark corner
1、这两个不是关键字,所以可以这样: int include; void define(void); 2、数组不能直接互相赋值,而结构体可以的原因下面这个解释感觉合理: dmr 在 1970s 初发明 C 语言是为了替换汇编语言,以便他和 ken 写操作系统。为了可见性(visibility),当初 C 语言里每个 operation (包括 operator、function ca
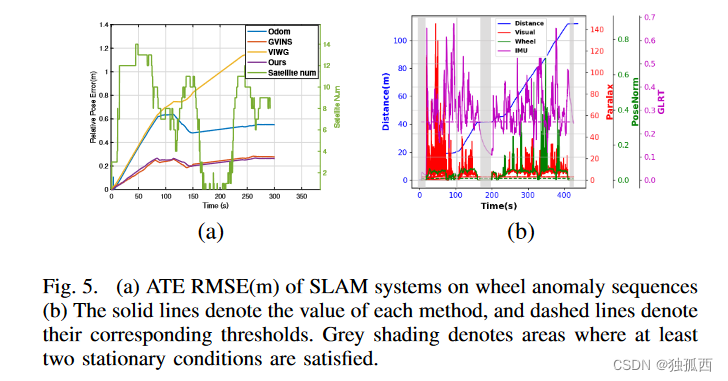
论文阅读:Ground-Fusion: A Low-cost Ground SLAM System Robust to Corner Cases
前言 最近看到一篇ICRA2024上的新文章,是关于多传感器融合SLAM的,好像使用了最近几年文章中较火的轮式里程计。感觉这篇文章成果不错,代码和数据集都是开源的,今天仔细读并且翻译一下,理解创新点、感悟研究方向、指导自己的研究。这篇文章通篇略读,主要做了工作做了一个紧耦合的RGBD - Wheel - IMUGNSS SLAM系统,然后加了两个创新点工作,一个是初始化,一个是传感器退化检测。
【北邮鲁鹏老师计算机视觉课程笔记】06 corner 局部特征
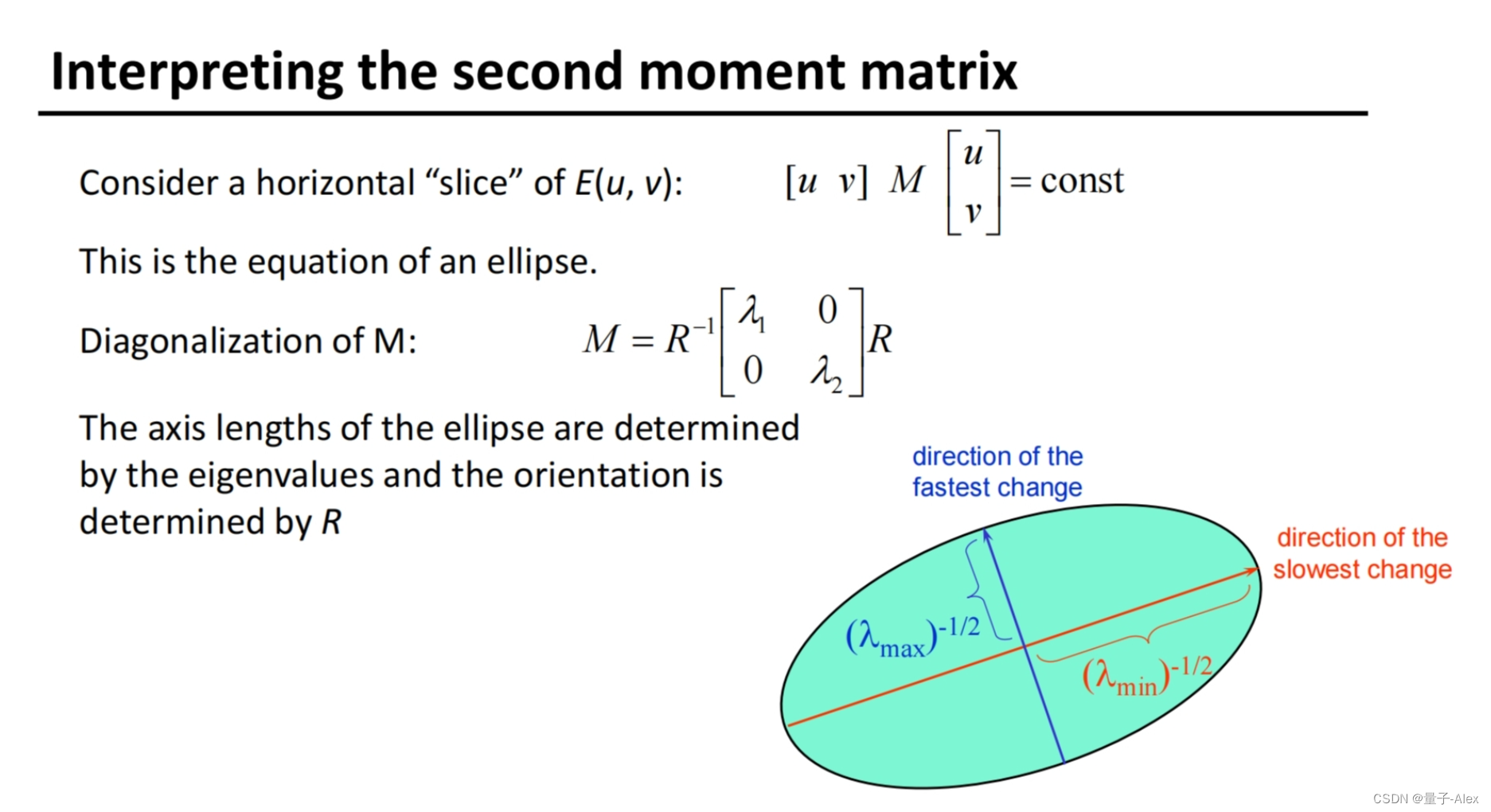
【北邮鲁鹏老师计算机视觉课程笔记】06 corner 局部特征 1 局部特征的任务牵引:全景拼接 ①提取特征 ②匹配特征 ③拼接图像 我们希望特征有什么特性? ①可重复性 ②显著性 ③计算效率和表达紧凑性 ④局部性 2 特征点检测的任务 3 角点 在角点,往任意方向移动窗体都会发生变化 4 角点检测的数学描述 用泰勒展开,建立E(u,v)和(u,v)的直
Shi-Tomasi Corner Detect
Harries Corner Detector 请看:https://mp.csdn.net/postedit/88410331 我们知道Harris Corner Detecor角点得分函数为: 而Shi-Tomasi的角点得分函数为: 如果R大于某个设定的阈值,则此处被认为是一个角点。 OpenCV中Shi-Tomasi Corner Detector函数--cv2.goo
Multi-Oriented Scene Text Detection via Corner Localization and Region Segmentation 论文理解
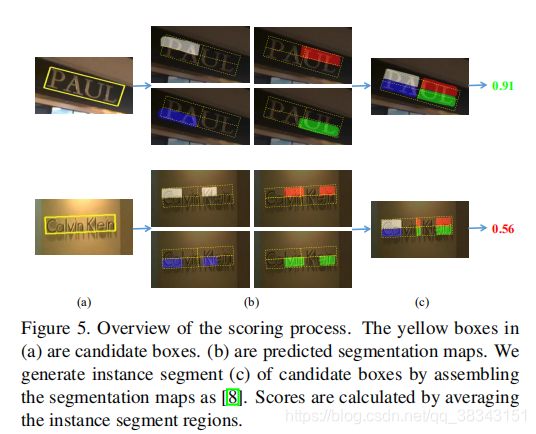
Introduction 目前场景文本检测分为两个分支,第一个分支基于通用对象检测器(SSD,YOLO 和DenseBox ),如TextBoxes ,FCRN 和EAST 等,它们直接预测候选边界框。第二个分支基于语义分割,它们生成分割图并通过后处理生成最终文本框。作者的动机主要来自两个观察结果:1)矩形可以由角点确定,无论矩形的大小,宽高比或方向如何; 2)区域分割图可以提供有效的文本位置信

低功耗设计-ir drop的signoff corner怎么选择?
我正在「拾陆楼」和朋友们讨论有趣的话题,你⼀起来吧? 拾陆楼知识星球入口 相关文章链接: Multi Voltage Flow笔记 有几个方向,看公司需求吧 1.功耗最差的; 2.tt的(tt85 是比较接近芯片真实工作情况的); 3.signoff文档要求的; 有要求就用要求的就好,没要求前两种看公司需求。

align_corner 参数作用概述
在看TORCH.NN.FUNCTIONAL.INTERPOLATE 官方文档时,有一个参数align_corners 参数理解不清楚。官方解释如下: 搜索资料后,通俗的解释如下: 默认值align_corners=False,下/上采样时会超出原本的边角像素值范围(边界点也为预测值,不为原像素值。)align_corners=True,下/上采样不会超出原本边角像素值范围。 举个实例,一个
时序分析基本概念介绍Delay Corner
今天给大家介绍的时序分析概念是Delay Corner,全称延时端角。这是MMMC分析中的"C"的概念。一个delay corner由一种library set和一个rc corner,再加上对应的operating condition组成。这三者的概念分别如下: 【】 【】 【】 对应这三种元素,在每个设计中,我们可以分别组合成很多种delay corner. 比如我们定义一个delay
OpenCV—Harris Corner Detection
角点是指在各个方向上灰度值变化都非常大的区域,灰度变化也就是灰度梯度。寻找角点也就是寻找灰度梯度最大的像素点。 我们使用一个窗口在图像上滑动来计算灰度的梯度 E ( u , v ) E(u,v) E(u,v) E ( u , v ) = ∑ x , y w ( x , y ) [ I ( x + u , y + v ) − I ( x , y ) ] 2 E(u,v)=\sum_{x,y}w
1005 Turn the corner
题意 给出街道在x轴的宽度X,y轴的宽度Y,还有车的长l和宽w,判断是否能够转弯成功。 思路: 如图所示 可以得出P点所在的方程为y=xtan(ANGLE)+L*sin(ANGLE)+W/cos(ANGLE) 点P的y坐标为(0,X) 可以求得 P的x坐标 只要x坐标的绝对值小于便可通过 三分法 // ConsoleApplication13.cpp : 定义控制台应用程序的入口点