cooperative专题
babyAGI(3)-COOPERATIVE_MODE
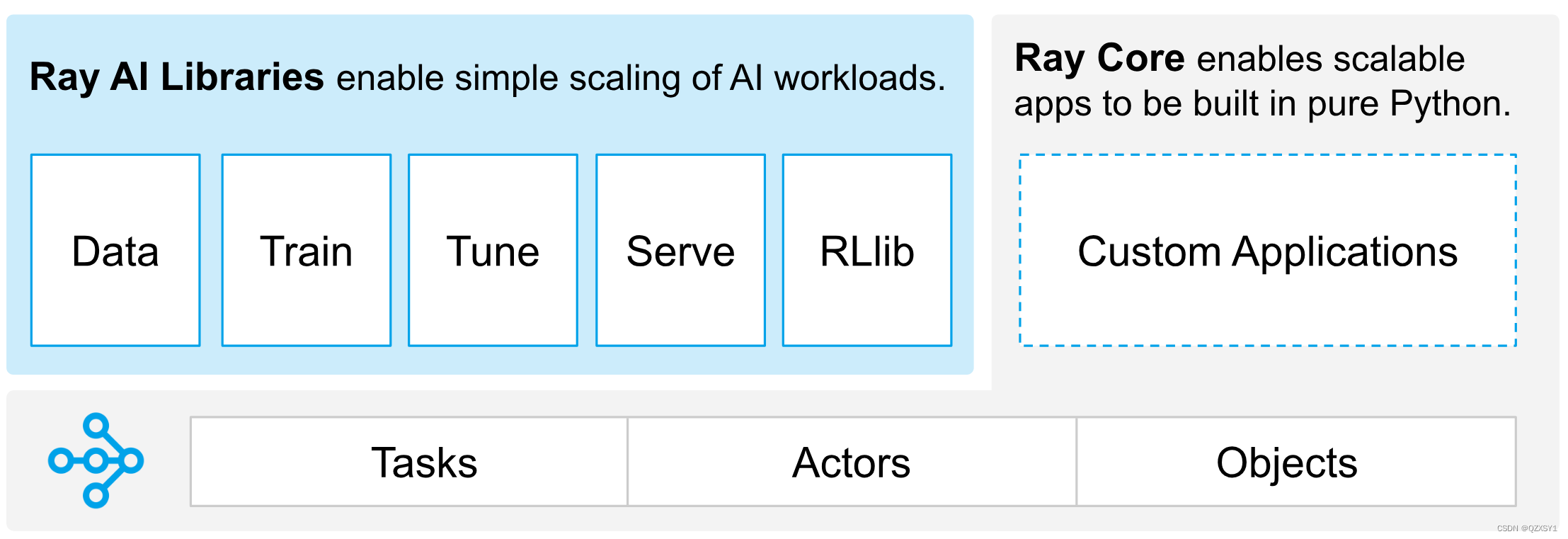
babyAGI中有cooperative模式,其核心是调用ray库,实现分布式多进程执行任务。 从BabyAGI的源码中,我们可以学习ray core的使用。 1. Ray核心概念 1.1 Tasks Ray 允许在单独的 Python 工作线程上异步执行任意函数。 这些异步执行的函数被称为“tasks”。 Ray 使任务能够根据 CPU、GPU 或自定义其资源需求。 Ray的集群调度

Automated and Cooperative Vehicle Merging at Highway On-Ramps
论文解读——Automated and Cooperative Vehicle Merging at Highway On-Ramps 参考资料来源:《Automated and Cooperative Vehicle Merging at Highway On-Ramps》一文 1.问题描述 该文章想解决如FIG.1中的匝道合流问题,传统的匝道合理需要等待main road车辆全部通过
Smart Use of Computational Resources Based on Contribution for Cooperative Coevolutionary Algorithms
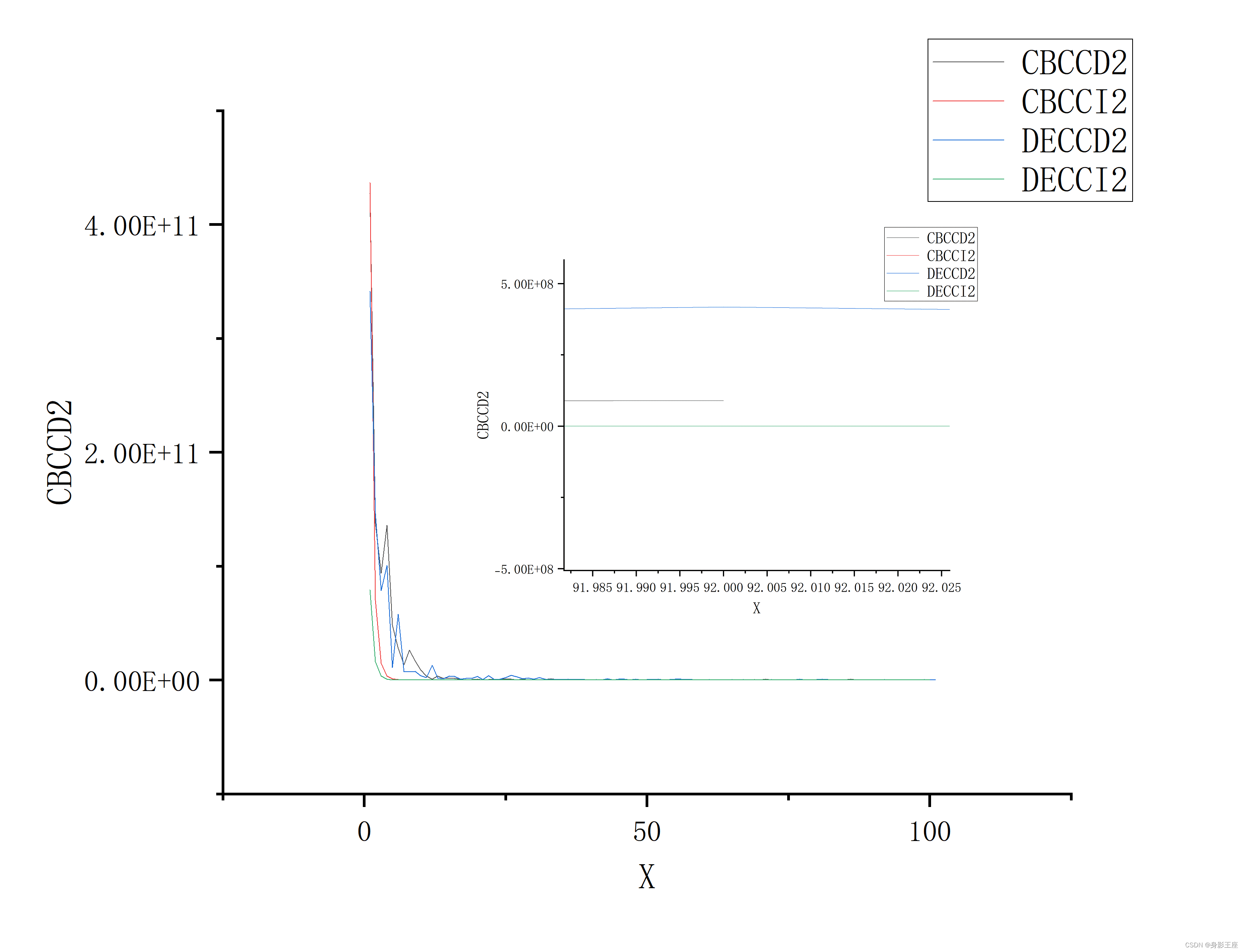
0、论文背景 本文再DECC的基础上,提出了一种新的优化框架CBCC。在处理不可分离问题时,各种子成分对个体整体适应度的贡献之间通常存在不平衡。使用循环方式平等地对待所有的子组件,浪费计算预算。本文提出了一个基于贡献的合作协同进化(CBCC),它基于它们对全局适应度的贡献来选择子组件。这减轻了不平衡的问题,并允许更有效地利用计算资源。 Omidvar M N, Li X, Yao X. Sm

【论文02】隐蔽通信中的中继应用《Relaying via Cooperative Jamming in Covert Wireless Communications》
有感而发(胡说八道):隐蔽通信或其他方向就是一个大坑(无贬义),几个大牛学者把论文当锄头,把这坑一点点挖大,挖完觉得差不多了,换一个位置继续挖。但前面的坑还在呀,于是后来人就前赴后继,争先恐后的在坑里站住一个位置,等填完了,上岸了,累了,也就这样了。 调侃几句哈哈,回到这篇论文。本文提到了中继(Relay),中继其实不算一个新概念,在无线通信中就被广泛应用,那么本文将中继引入到隐蔽通信中,结果是
Learning for Vehicle-to-Vehicle Cooperative Perception under Lossy Communication
Learning for Vehicle-to-Vehicle Cooperative Perception under Lossy Communication
CORE: Cooperative Reconstruction for Multi-Agent Perception 论文阅读
论文连接 CORE: Cooperative Reconstruction for Multi-Agent Perception 0. 摘要 本文提出了 CORE,一种概念简单、有效且通信高效的多智能体协作感知模型。 从合作重建的新颖角度解决了该任务: 合作主体共同提供对环境的更全面的观察整体观察可以作为有价值的监督,明确指导模型学习如何基于协作重建理想的观察 CORE 利用三个组
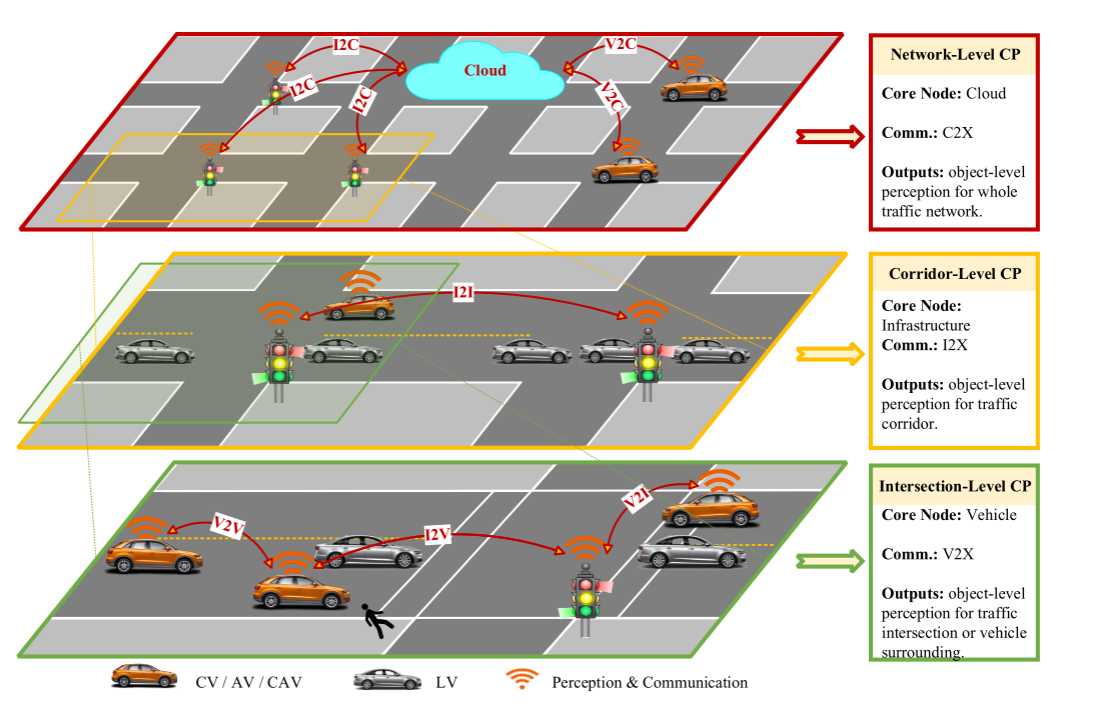
A Survey and Framework of Cooperative Perception 论文阅读
论文链接 A Survey and Framework of Cooperative Perception: From Heterogeneous Singleton to Hierarchical Cooperation 0. Abstract 首次提出统一的 CP(Cooperative Percepetion) 框架回顾了基于不同类型传感器的 CP 系统与分类对节点结构,传感模态和