cameras专题
AVT Prosilica GC Vision Cameras 相机视觉说明使用安装。具体详情内容可参看PDF目录内容。
AVT Prosilica GC Vision Cameras 相机视觉说明使用安装。具体详情内容可参看PDF目录内容。

ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras
orb-slam2 对 1进行了改进, 从overview图中就可以看出 主要体现在 对stereo camera 和 depth camera的支持 加入了full BA
TOF摄像机视频中的运动分割(MOTION SEGMENTATION IN VIDEOS FROM TIME OF FLIGHT CAMERAS)
摘要: 本文研究了深度摄像机视频序列中独立运动物体的运动估计和分割问题。具体地,我们提出了一种基于距离流和光流约束方程融合的运动估计算法。流场用于推导长期点轨迹。分割技术根据运动和深度相似性将轨迹分组为时空对象。我们展示了用飞行时间摄影机拍摄的真实场景的结果。 1.介绍: 本文分析了飞行时间(TOF)摄像机拍摄的视频序列中的短期和长期运动。我们通过综合距离流和光流来估计视频中两
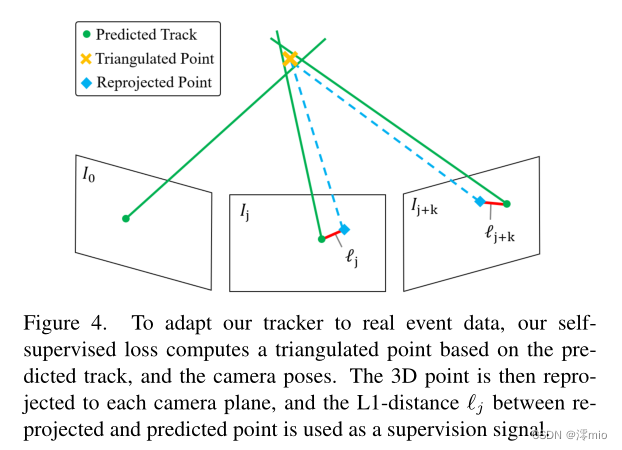
深度学习论文分享(二)Data-driven Feature Tracking for Event Cameras
深度学习论文分享(二)Data-driven Feature Tracking for Event Cameras(CVPR2023) 前言Abstract1. Introduction2. Related Work3. Method3.1. Feature Network3.2. Frame Attention Module3.3. Supervision 4. Experiments5.
笔记:Object-Level Motion Detection from Moving Cameras
笔记:移动摄像运动检测 第一章 介绍 固定机位的运动检测有一下常用方法: frame differencebackground subtractionoptical flow 而移动相机的检测的复杂性主要来自于:背景的多样性、背景的运动今年来的移动相机运动检测论文: [1], [2], [8], [9], [10], [11], [12],[13], [14]第一类方法:使用目标物体和背景的径
Events-to-Video: Bringing Modern Computer Vision to Event Cameras
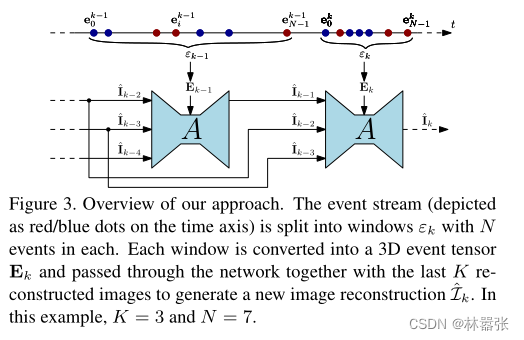
Events-to-Video: Bringing Modern Computer Vision to Event Cameras 摘要 事件相机具有诸多优点,但其生成的数据流无法直接应用于传统视觉网络。提出了一种能从事件数据进行视频重建的视觉策略,并应用于后续的视觉任务。 Introduction 这里列举了事件相机的优点,后续笔锋一转,就开始讲当前研究的困境。困境是因为事件相机无法直接

PaperReading: Articulated Multi-Perspective Cameras and Their Application to Truck Motion Estimation
题外话:第一次写博客,之前研一上课也有很多报告想要写到博客中,但拖延症晚期一直没有弄。今天先尝试写一篇Paper Reading 之后再把先前的一些课程作业分享上来。 Paper Reading: Articulated Multi-Perspective Cameras and Their Application to Truck Motion Estimation 铰接多视角摄像机及其在
ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras
[1] Mur-Artal R, Tardós J D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1-8. 为了方便阅读转自【泡泡机器人翻译专栏】ORB-SLAM2:一种开源的VSLA
ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras
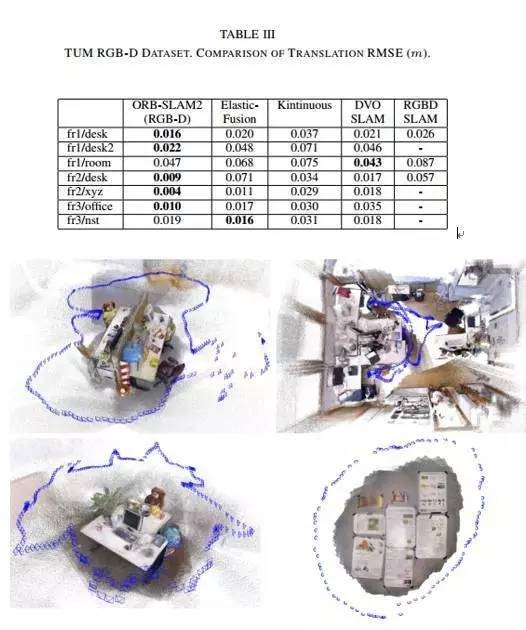
https://www.sohu.com/a/154011668_715754 泡泡机器人翻译作品 原文:ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras 作者:Raúl Mur-Artal and Juan D. Tardós 摘要 ORB-SLAM2是基于单目,双目和R

《A High-Quality Denoising Dataset for Smartphone Cameras》阅读笔记
智能手机相机的高质量去噪数据集 论文下载:http://openaccess.thecvf.com/content_cvpr_2018/papers/Abdelhamed_A_High-Quality_Denoising_CVPR_2018_paper.pdf (就是简单的把文章地翻译一下) 摘要 在过去的十年里,从DSLR和点射相机成像到智能手机相机成像的巨大转变。 由于