c4专题

编导期末判断总结(C4)
编导期末判断总结(C4) 判断 优先级 逻辑或(&&)的优先级高于逻辑与(||) != 和 == 是同一优先级 复合语句 复合语句的作用就好比一个和单个语句 我们把用大括号括住的多个语句叫做复合语句,这个语句通称为“块” 比如 if (i > 10){cin >> name;cin >> age;cout <<name<<endl;cout << age<endl;

1215: 【C4】【搜索】【回溯】数字全排列
题目描述 排列与组合是常用的数学方法。 先给一个正整数 ( 1 < = n < = 5 ) 。例如n=3,列出所有组合,并且按字典序输出: 1 2 3 1 3 2 2 1 3 2 3 1 3 1 2 3 2 1 输入 输入一个整数n( 1<=n<=5) 输出 输出所有全排列 每个全排列一行,相邻两个数用空格隔开(最后一个数后面没有空格) 样例输入 3 样例输出 1 2 3
工作流模式_结构化模式(C4)
[b]两个结构化模式 这两个模式的共同点在于:模式所涉及流程的执行路径是由运行时决定的,而非设计时确定。包括: [list] [*] Arbitrary cycles(强制循环模式) [*] Implicit termination(隐式终止模式) [/list] [color=red]WP_10、Arbitrary cycles(强制循环模式)[/color][/b] 描述


画图之C4架构图idea和vscode环境搭建篇
VS Code 下C4-PlantUML安装 安装VS Code 直接官网下载安装即可,过程略去。 安装PlantUML插件 在VS Code的Extensions窗口中搜索PlantUML,安装PlantUML插件。 配置VS Code代码片段 安装完PlantUML之后,为了提高效率,我们最好安装PlantUML相关的代码片段。 打开VS Code菜单,层级为Code→Prefe
EM32DX-C4【C#】站15
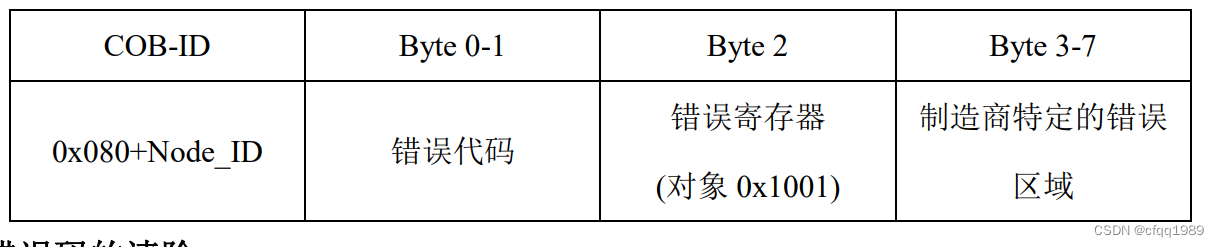
1外观: J301 直流 24V 电源输入 CAN0 CAN0 总线接口 CAN1 CAN1 总线接口 J201 IO 接线段子 S301-1、S301-2 输出口初始电平拨码设置 S301-3~S301-6 模块 CAN ID 站号拨码开关 S301-7 模块波特率拨码设置 S301-8 终端电阻选择开关 2DI: 公共端是: 0V【GND】 6100H DI输入寄
C4:4个函数,528行代码实现可自举的 C语言编译器
以下内容转载自 https://www.toutiao.com/i6831502722718499340/ 引言 自从华为方舟编译器横空出世,一举成为全民网红之后,一下子点燃了大家对编译器的热情。不过,对于大多数人来说,编译器仍然是遥不可及的神秘存在。 今天,介绍一个国外大牛写的C语言编译器 - C4,揭开编译器的神秘面纱。原来实现一个具备基本功能的编译器,竟是如此简单! C4:4个函数实

教你看懂存储卡的速度:C2 、C4 、C6 、C10,U1、U3,UHS-Ⅰ、UHS-Ⅲ、V6、V10、V30、V60、V90,A1、A2。容量等级SD、SDHC、SDXC、SDUC
参考文章 2021年存储卡内存卡推荐-类型速度品牌介绍,行车记录仪存储卡选择,手机内存卡监控高速存储卡推荐 1.概述 C、U、V指的是最低写入速度A认证的标准是平稳的读写速度,对最低写入速度和IOPS均有要求 2.写入速度等级(最重要的参数) 写入速度等级有三个参数表示,分别是普通的速度等级Speed Class*(C*),超高速速度等级
R/d2及S/C4估计总体标准差,比较其CPK及规格限概率的差异
R/d2 和 S/C4 是用于估计总体标准差的无偏估计方法,通常用于控制图中。这些估计方法的主要目的是通过样本数据来估计总体标准差,以便监测过程的稳定性和变异性,而不需要收集整个总体的数据。 具体来说: R图中的 R/d2 和 S图中的 S/C4 都是无偏估计,其中 d2 和 C4 是常数,用于修正范围和标准差以获得更接近总体标准差的估计值。 import numpy as npimpor

估算总体标准差sigma = s/c4
sigma = s / c4 是一种用于估算总体标准差(sigma)的简单方法,其中: s 是各组样本标准差的均值。c4 是一个与样本容量相关的常数,通常根据样本容量的大小选择合适的值。 这个方法通常用于质量控制和过程监控,尤其在使用 X-S 控制图时。通过计算各组样本标准差的均值并除以适当的 c4 值,可以估算总体标准差,以便在质量控制中对过程的变异性进行评估和监控。请确保所使用的 c4 值

网络监控【C4-python代码-源码学习】(mininet+ryu控制器)
学习记录 文章目录 1.将代码复制粘贴到 ryu/ryu/app目录下,保存为python文件。2.打开一个终端Terminal3.再打开一个终端Terminal1.搭建拓扑2.配置信息3.运行 4.回到mininet的终端界面结束 源码引用自 基于ryu实现网络的流量监控–monitor 1.将代码复制粘贴到 ryu/ryu/app目录下,保存为python文件。
【c4】设备读写,同步和互斥,ioctl,进程休眠,时间和延时,延缓
文章目录 1.实现设备读写:write函数中一个进程写没问题,两进程写:第一个进程运行到kzalloc时,第二个进程也执行了kzalloc,只第二个进程地址保存在c中,第一个进程分配内存空间地址丢失造成内存泄漏。第一个进程运行到kzalloc时第二个进程调用了kfree,这时第一个进程执行到copy_from_user出现问题2.同步和互斥:避免多进程同时操作设备问题3.实现设备驱动的ioc