本文主要是介绍电磁仿真软件CST六面体网格和六面体TLM网格的区别【仿真入门】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
六面体网格(1)
Time Domain Solver中使用的Hexahedral Mesh!
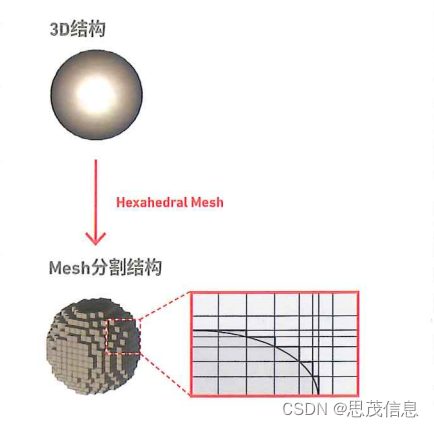
网格可以说是为了Maxwell方程式计算,将仿真结构分割成许多小的网格单元。因此,仿真计算中识别的结构是网格结构。
Time Domain Solver中使用的Hexahedral Mesh是将结构切成六面体形状的网格。因此,如右图所示的球体(Sphere)进行网格剖分时,会显示为阶梯状(Staircase)的网格。换句话说,网格结构无法正常体现实际的3D结构,所以可能会导致不准确的仿真结果。
为了弥补六面体网格的缺点,CST开发了专有网格技术:能在一个网格中识别两种材料的PBA(理想边界近似Perfect Boundary Approximation)和识别三种材料的(介质、导体、介质)的TST(Thin sheetTechnology 薄片技术)。这样,能实现对曲面物体细线、薄片结构的完美逼近,可以得到精确的仿真结果。
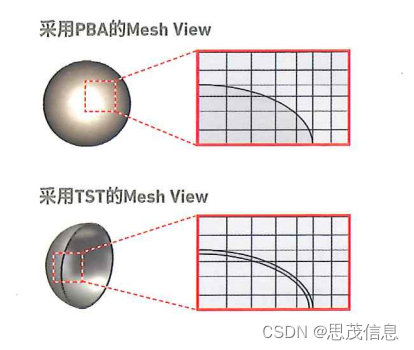
如果一个网格内穿过薄薄的导体Sheet时,利用TST方式可以识别出来并进行正常的仿真分析。但是穿过两个导体Sheet时,会产生阶梯状网格(Staircase Mesh)。
六面体网格(2)
Time Domain Solver中使用的Hexahedral Mesh!
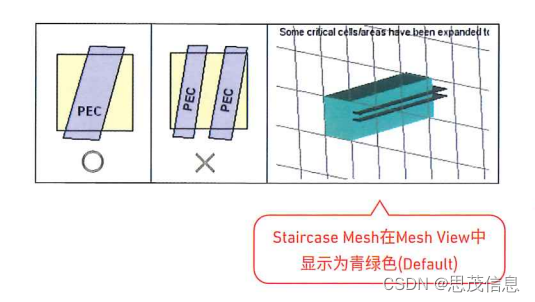
Staircase Mesh在开始仿真后进行矩阵计算(Matrix Calculation)时,弹出下面的警告信息的同时,Mesh View中显示为青绿色。如果发生Staircase Mesh时,必须要确认该网格发生在哪个部位。
因为,Staircase Mesh会在全部网格填满PEC的状态下进行仿真分析。比如,有两个如下图所示的倾斜sheet,其中间发生Staircase Mesh时,两个sheet处于短路状态,无法得到正确的仿真结果。
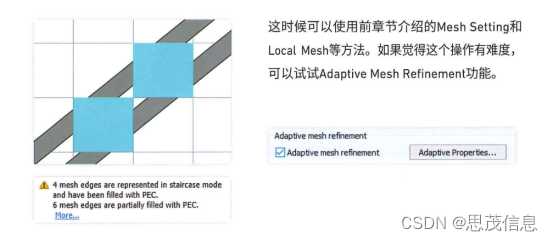
这时候可以使用前章节介绍的Mesh Setting和Local Mesh等方法。如果觉得这个操作有难度可以试试Adaptive Mesh Refinement功能。
可以在Solver Setup窗口设置自适应网格加密(Adaptive Mesh Refinement)功能。勾选该设置的状态下进行仿真分析时,会逐渐增加网格数量反复进行迭代计算。随着迭代次数的增加,用于仿真的网格数量会越来越多,仿真结果的准确度也会越高。
如果前后两次迭代计算的结果差异达到设置的判定值以内,那么就意味着仿真已经收敛,网格也达到准确的仿真分析所需的数量。寻找精确仿真分析所需网格数量的过程,称之为AdaptiveMesh。但是,使用六面体网格时用户可以自由地调整网格,所以使用Local Mesh或MeshSpecial设置可以更加有效地设置网格,快速取得准确的结果。
因此,不建议在TimeDomain Solver中使用Adaptive Mesh。但Adaptive Mesh的好处是可以用最少的设置取得准确的结果。大家可以做一下参考!
六面体TLM网格
Time Domain Solver中使用的Hexahedral TLM Mesh!
使用Time Domain Solver时,在Mesh Type设置栏或Solver Setup窗口,可以看到Hexahedral下拉菜单中有 HexahedralTLM选项。

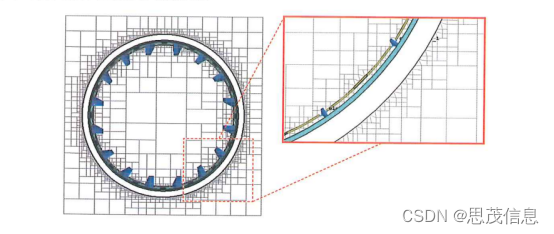
TLM Solver是传输线矩阵(Transmission Line Matrix)的缩写,通过八又树网格(ctree Mesh)形式可以减少整体网格数量,网格效率高。就原先的六面体网格而言,在又小又复杂的结构上剖分成小的网格,会影响整个仿真领域,导致网格数量巨大。
但是TLM Mesh可以在细小结构上剖分成小的网格,大结构上剖分成大的网格,是可以将多尺度(multiscale)问题的影响降到最低的网格方式。
因此,对同时存在大型结构和细小型结构的模型进行仿真分析的领域,例如毫米波天线阵列、EMC、E3(EMP,Lightning等)的分析中,可以使用TLM Mesh 。并且,还可以使用GPU进行加速,所以如果仿真的结构由于多尺度问题导致 网格数量巨大的话,可以考虑采用TLM Mesh。大家可以参考一下!
【推荐内容】
ABAQUS设置各向异性材料的蠕变步骤
Abaqus查看本构模型的方程方法
Abaqus软件xml分析失败是什么原因?
这篇关于电磁仿真软件CST六面体网格和六面体TLM网格的区别【仿真入门】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






