本文主要是介绍扫描线 窗内的星星,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
题目链接:248. 窗内的星星
算法分析
经过亚特兰蒂斯 那题的洗礼,这道扫描线题目就显得简单多了。但是很多细节还是得注意。这里只说细节。
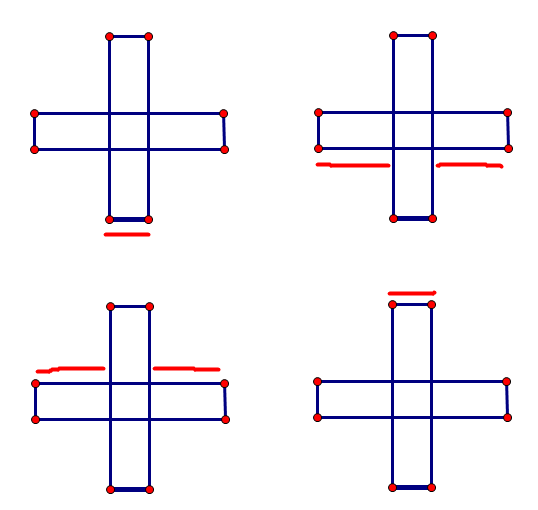
1.边框上的星星不算怎么处理。如下图:

左下角的星星坐标为 ( x , y ) (x,y) (x,y),如果边框上的星星算的话,那么整个蓝色区域都可以放置边框的右上角顶点。如果不算的话,因为星星的坐标都是整数,边框的宽高也是整数,所以可放置的区域范围大致如上图绿色,在绿色区域中放置边框的右上角顶点,该星星肯定能被包含在内。
假设就这一颗星星,为了方便计算,可以考虑将星星和区域整体向下向左移动 0.5 0.5 0.5的距离,这样的话,星星的坐标变成了 ( x − 0.5 , y − 0.5 ) (x-0.5,y-0.5) (x−0.5,y−0.5),区域的左下角坐标为 ( x , y ) (x,y) (x,y),右上角坐标为 ( x + w − 1 , y + h − 1 ) (x+w-1,y+h-1) (x+w−1,y+h−1)。如果是多颗星星的话,也可以假设整体移动。因为我们扫描线关心的是这些区域,所以丝毫不影响结果。就算不移动,将区域的坐标按实型处理,也是可以的。
2.每个矩形区域的右边界的 x x x坐标为什么是 x + w x+w x+w,而不是 x + w − 1 x+w-1 x+w−1。我们要讨论的问题是:在平面上有若干个区域,每个区域都带有一个权值,这些区域是交叉的,问在哪个坐标上,所有的权值和最大?

该区域左边界的横坐标是 x x x,一直到 x + w − 1 x+w-1 x+w−1都是该区域的范围,因为数据都是整数,所以在 x + w x+w x+w处,该区域的影响才结束,因此,右边界是 x + w x+w x+w。
3.区域的边界排序问题。排序如下:
bool cmp(ScanLine a, ScanLine b)
{if (a.x != b.x) return a.x < b.x;else return a.c < b.c; //
}
为什么横坐标相等的情况下,要按照亮度由小到大排序?假设当前值是ans,先加再减肯定比先减再加所产生的最大值要大,这样不应该是由大到小排序吗?其实如果 c = − 1 c=-1 c=−1的话,是要减去的, c = 1 c=1 c=1的话是要加上去的,在扫描到某个位置的时候,应该先减掉,然后再加上,否则会造成错误。
4.数组的大小要注意。
#include <iostream>
#include <cstdio>
#include <cmath>
#include <algorithm>
#include <cstring>
#include <map>
#include <vector>
using namespace std;
#define ll long long
const int N = 1e4 + 10;
struct ScanLine
{ll x, y1, y2, c;
}st[2*N];
ll lsh[4*N], val[4*N];
ll a[4*N];
map<ll, ll> lshval;
struct Segmentree
{ll dat, lazy;
}tr[16*N];
ll re()
{ll x = 0, f = 1; char c = getchar();while (c < '0' || c > '9') {if (c == '-') f = -1; c = getchar();} while (c >= '0' && c <= '9') {x = x * 10 + c - '0'; c = getchar();}return x * f;
}
ll n, w, h;
void szbuild(int p, int l, int r)
{tr[p].dat = tr[p].lazy = 0; if (l == r) return;int mid = (l + r) >> 1;szbuild(2 * p, l, mid);szbuild(2 * p + 1, mid + 1, r);
}
void pushdown(int p, int al, int ar)
{if (al == ar) return; // 叶节点无需下传 if (tr[p].lazy){tr[2*p].dat += tr[p].lazy;tr[2*p+1].dat += tr[p].lazy;tr[2*p].lazy += tr[p].lazy;tr[2*p+1].lazy += tr[p].lazy;tr[p].lazy = 0;}
}
void szchange(int p, int al, int ar, int ql, int qr, int v)
{if (ql > ar || qr < al) return;if (ql <= al && ar <= qr){tr[p].dat += v;tr[p].lazy += v;return;}pushdown(p, al, ar);int mid = (al + ar) >> 1;szchange(2 * p, al, mid, ql, qr, v);szchange(2 * p + 1, mid + 1, ar, ql, qr, v);tr[p].dat = max(tr[2*p].dat, tr[2*p+1].dat);
}
bool cmp(ScanLine a, ScanLine b)
{if (a.x != b.x) return a.x < b.x;else return a.c < b.c; //
}
int main()
{while (~scanf("%lld%lld%lld", &n, &w, &h)){ll x, y, c;int t = 0;memset(st, 0, sizeof(st));memset(a, 0, sizeof(a));memset(lsh, 0, sizeof(lsh));lshval.clear();for (int i = 1; i <= 2 * n; i += 2){x = re(); y = re(); c = re();st[i].x = x; st[i].y1 = y; st[i].y2 = y + h - 1; st[i].c = c;st[i+1].x = x + w; st[i+1].y1 = y; st[i+1].y2 = y + h - 1; st[i+1].c = -c;a[++t] = y; a[++t] = y + h - 1;// 小细节 st[i+1].x是x+w,不是x+w-1 }// 离散化 sort(a + 1, a + t + 1);memcpy(lsh, a, sizeof(a));int cnt = unique(lsh + 1, lsh + t + 1) - lsh - 1;for (int i = 1; i <= t; ++i){ll tem = a[i]; // 原数 注意a[]会超int a[i] = lower_bound(lsh + 1, lsh + cnt + 1, a[i]) - lsh;val[a[i]] = tem;// lshval[tem] = a[i]; // 超下标上限了 lshval[tem] = a[i]; } // 建线段树,维护的是纵坐标,总共有cnt个 szbuild(1, 1, cnt);// 扫描进行区间修改和更新答案 ll ans = -1;sort(st + 1, st + 2 * n + 1, cmp); for (int i = 1; i <= 2 * n; ++i){ll ql = lshval[st[i].y1], qr = lshval[st[i].y2], c = st[i].c;// ll ql = lower_bound(lsh + 1, lsh + cnt + 1, st[i].y1) - lsh;// ll qr = lower_bound(lsh + 1, lsh + cnt + 1, st[i].y2) - lsh;// ll c = st[i].c;szchange(1, 1, cnt, ql, qr, c);ans = max(ans, tr[1].dat);} printf("%lld\n", ans);}return 0;
}
反思与总结
-
如果有部分需要开long long,那就干脆全部都开long long。这个题目就是在离散化的时候 t e m tem tem变量定义成了 i n t int int,导致溢出,调了很久。
-
多组数据的时候,打扫战场要彻底。
这篇关于扫描线 窗内的星星的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!