本文主要是介绍电机控制系列模块解析(18)—— 位置观测器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、简要综述
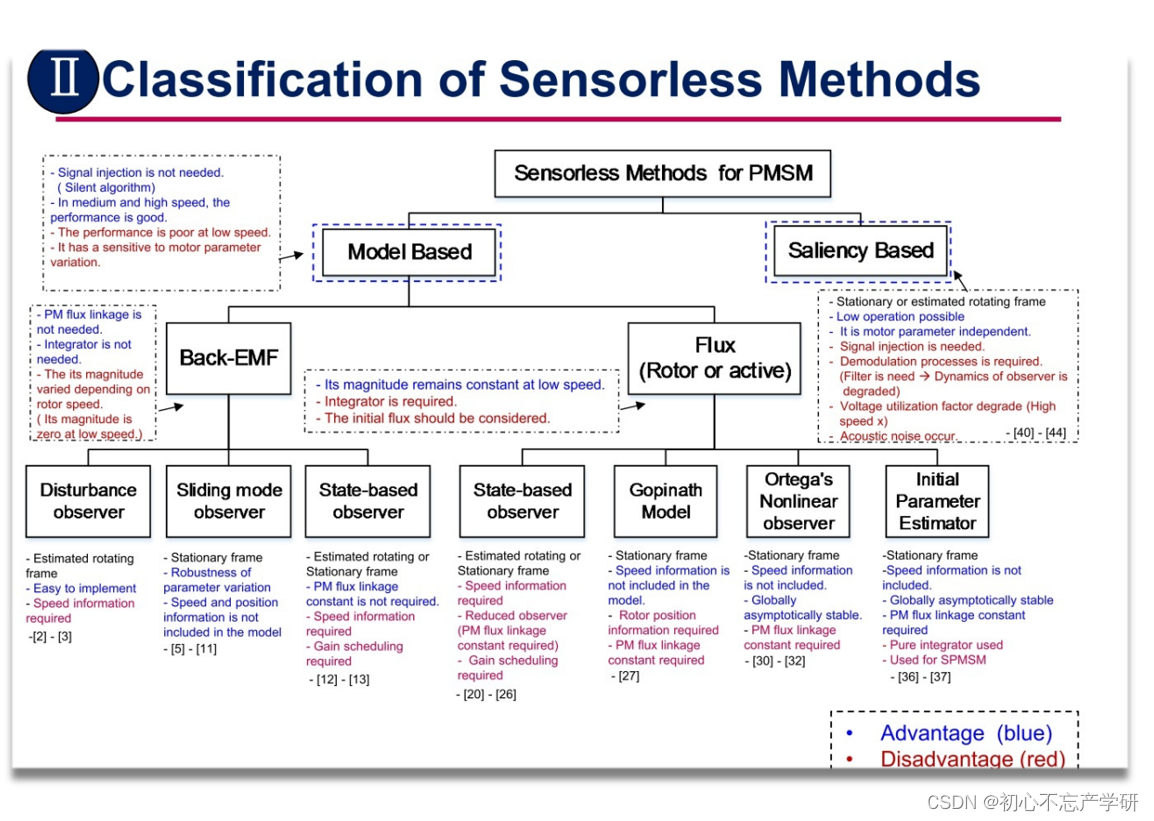
无传感器控制策略中观测器的分类,主要分为两类:基于模型的方法(Model Based)和基于显著性的方法(Saliency Based)。在此借用一张文献综述的图片,下面将列出下面借用图片中的各个分支的优缺点:
1. Model Based:
-
反电动势(Back-EMF):
- 优点:不需要PM磁链信息;不需要积分;在中高速下性能良好。
- 缺点:在低速下性能较差;对电机参数变化敏感。
- 磁链观测器(Rotor or active):
- 优点:全速下磁链幅值恒定(在常规工况)。
- 缺点:需要积分环节,需要初始的磁链信息。
1.1 反电动势
-
扰动观测器(Disturbance observer):
- 优点:旋转坐标系;鲁棒性好;易于实现。
- 缺点:需要速度信息;在低速下操作可能不稳定。
-
滑模观测器(Sliding mode observer):
- 优点:静止坐标系,具有较强的抗干扰能力和参数鲁棒性;不需要速度和位置信息。
- 缺点:滑模抖振问题,低速估计精度问题。
-
状态观测器(State-based observer):
- 优点:静止坐标系或旋转坐标系,不需要PM磁链信息。
- 缺点:需要速度信息;需要增益整定。
1.2 磁链观测器
-
状态观测器(State-based observer):
- 优点:静止坐标系或旋转坐标系。
- 缺点:需要速度信息;需要增益整定;降阶观测器(假设磁链幅值恒定)。
-
Gopinath 模型:
- 优点:静止坐标系;不需要速度信息。
- 缺点:需要位置信息;假设磁链幅值恒定。
-
Ortega 非线性观测器:
- 优点:静止坐标系;不需要速度信息;全局渐近稳定。
- 缺点:假设磁链幅值恒定。
-
初始参数估计器(Initial Parameter Estimator):
- 优点:静止坐标系;不需要速度信息;全局渐近稳定。
- 缺点:需要积分环节,假设磁链幅值恒定。
2. Saliency Based:
- 静止坐标系或旋转坐标系,可零低速运行。
- 需要注入额外的控制信号,需要解调,增大运行噪声,电压利用率降低。
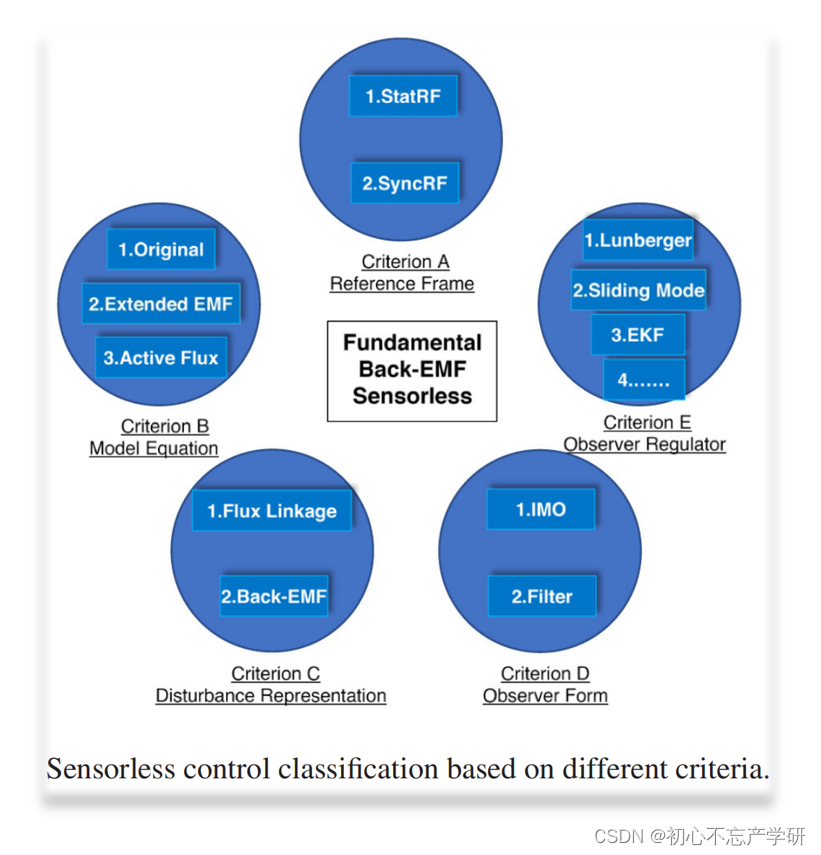
无位置传感器基频观测器分类依据较多,以下列出五种分类依据:
二、有源磁链观测器
有源磁链观测器(Active Flux Observer, AFO)是一种专为交流电机设计的无位置传感器控制技术的核心组件,它能够通过实时分析电机的定子电压和电流信号,来间接估算出电机内部的磁链状态(包括磁链幅值和相位),从而实现对电机转子位置和速度的有效估计。有源磁链观测器在多种类型的交流电机无位置传感器控制中扮演着统一的关键角色,即它作为一种通用的、广泛适用的磁链观测手段,适用于不同类型的交流电机,如永磁同步电机(PMSM)、感应电机(IM)和同步磁阻电机(SRM)等。
有源磁链观测器的主要优势在于:
-
无传感器化:无需依赖传统的机械位置传感器(如编码器、旋转变压器等),降低了系统的复杂性、成本以及潜在故障点,提高了系统的可靠性。
-
通用性:适用于多种类型的交流电机,无论电机结构如何(如永磁电机、感应电机等),只要电机工作时存在定子电压和电流信号,就可以通过有源磁链观测器进行磁链估计。
-
实时性与准确性:实时计算磁链信息,对于电机的动态性能控制至关重要,尤其是在高动态响应和精确控制场合,如伺服驱动、电动汽车动力系统等。通过优化设计和先进的控制算法,有源磁链观测器能够在宽速度范围内提供较为准确的磁链观测结果,特别是在低速区域(零频除外),通过引入改进的算法(如自适应观测器、滑模观测器、非奇异终端滑模等)可以显著改善观测器的性能。
-
适应性强:有源磁链观测器能够适应电机参数变化(如转子电阻、电感等)和外部扰动,通过适当的自适应或鲁棒设计,确保在电机运行条件变化时仍能维持较好的观测效果。
综上所述,从功能和技术特点上看,有源磁链观测器确实可以被视为一种广泛应用在多种类型交流电机无位置传感器控制中的核心观测器技术,它提供了统一且有效的磁链观测手段,促进了无位置传感器控制技术的发展与普及。

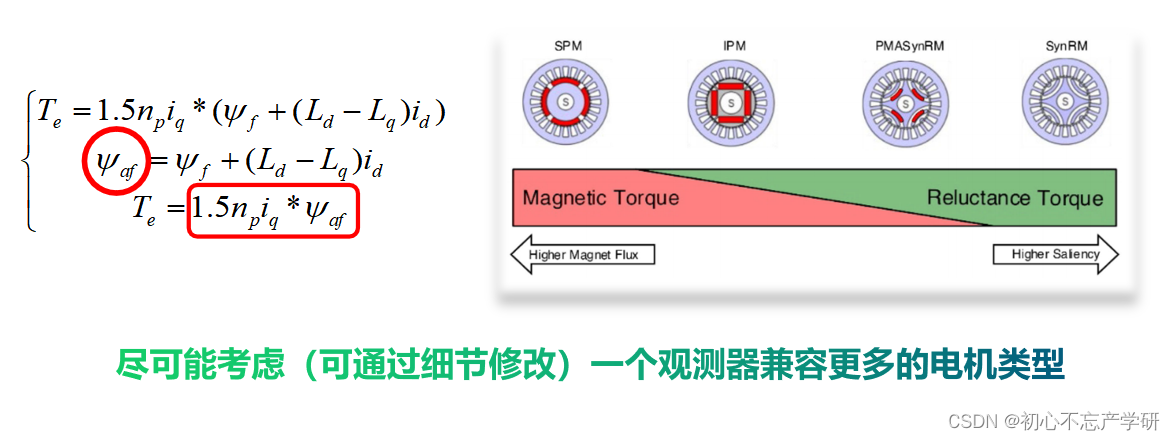 在工程应用中,一般先追求一个大一统的Sensorless观测器,比如有源磁链观测器
在工程应用中,一般先追求一个大一统的Sensorless观测器,比如有源磁链观测器
有源磁链转子位置观测器可兼容的三相交流电机类型
动力学结构:旋转电机、直线电机
不同的永磁体材料:钕铁硼、铁氧体、钐钴
开关磁阻电机(暂时未包括)、感应电机(异步电机)、磁场调制电机
在上图中,依据永磁转矩与磁阻转矩的占比可分为:表贴式、内置式、内埋式、同步磁阻电机
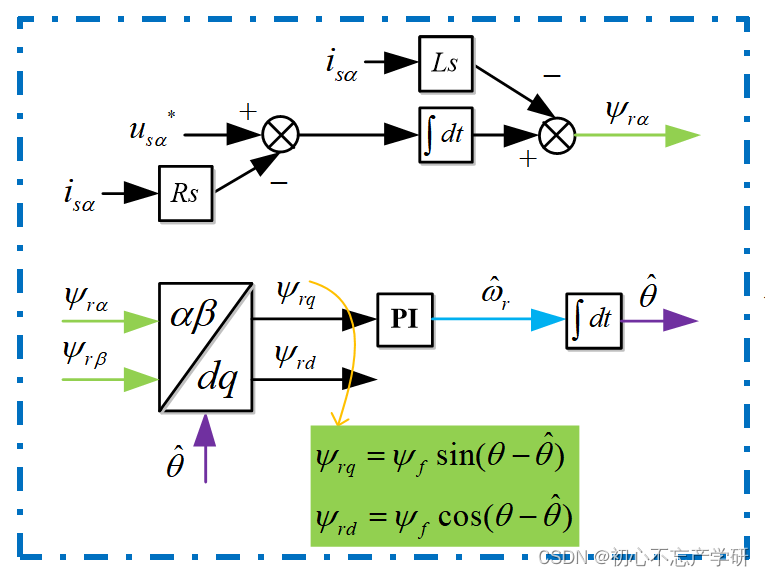
由上图可知,无位置传感器中分为磁链观测和位置估计两个部分,当前也有文献指出可以直接根据磁链来计算出电机位置,从而实现直接磁场定向(解耦了位置信息和转速信息的提取)。但当前大部分方法仍然采用上图所示方法,即无位置传感器中分为磁链观测和位置估计两个部分,此类间接磁场定向方案会对磁链估计的准确度要求低一些,从而使得整个方案会有一定的性能鲁棒性。
磁链观测器可行性分析:
(零定子频率不可观测除外)
优势:
转子磁链幅值可在全速度范围内保持一定的信噪比。
在静止坐标系下,转子磁链的获取不依赖电角速度 。
劣势:
磁链观测器它的输入电压和输入电流均为交流量,需要另外增加滤波器以滤去直流分量和高频谐波 ,可选的滤波器有高通滤波器和自适应带通滤波器。
观测器对其定子电阻和定子电感的变化较为敏感。(可考虑附加定子电阻等参数在线辨识模块)
观测器的积分初值的准确性决定了其收敛的速度,较快的收敛速度可最终实现电机从零速加速来进行带载启动。而当参数不准确或者电压和电流测量误差偏大时可能会导致观测器无法快速收敛甚至发散(即使有定子电阻在线辨识,其辨识本身的收敛速度一般很慢,且同样依赖测量精度)。
磁链观测器的性能评估:
A. 稳定性分析(收敛区域和收敛速度,计算和设计可调参数)
B. 参数敏感性分析(也影响着其稳定性,收敛区域以及收敛速度)
C. 参数和测量(相位和幅值)两个方面失配问题 (参数随温度和磁饱和变化,测量误差和延时)
D. 特殊或极限运行工况的稳定性分析(过调制、弱磁、低载波比(高速以及超高速);极低速;电机易于磁饱和,初始位置不准确(同步机),测量误差较大,逆变器非线性特征较为明显,环境温度变换范围较大)
主要挑战以及解决方法:
有源磁链观测器作为交流电机无位置传感器控制的重要组成部分,在实际应用中确实面临一些挑战,尤其是在追求极致性价比的工程背景下,以下是一些主要挑战及相应的解决方法:
挑战1:观测精度与稳定性
挑战描述:在电机启动、低速运行、负载突变或电机参数变化等条件下,有源磁链观测器可能面临观测误差增大、动态响应迟缓或稳定性下降等问题。
解决方法:
自适应或鲁棒设计:根据电机参数或状态估计,调整观测器增益,以适应电机参数变化。或者采用鲁棒控制理论设计观测器,增强其对外部扰动和模型不确定性的抑制能力。
引入补偿策略:针对特定工况(如低速或零速)设计专门的补偿算法,如零速补偿、低频增益增强等,以改善观测精度。属于工程特殊处理(提升鲁棒性的简单办法)。
挑战2:硬件资源限制与实时性要求
挑战描述:在嵌入式控制系统中,有限的计算资源和严格的实时性要求可能限制了复杂观测器算法的应用。
解决方法:
模型降阶与近似:对电机模型进行合理简化,降低计算复杂度,同时保证模型的代表性。对于复杂的非线性模型,可以采用线性化、状态空间平均或其他近似方法。
挑战3:电机参数依赖与初始值敏感
挑战描述:有源磁链观测器的性能往往依赖于准确的电机参数,而实际应用中电机参数可能因制造公差、温度变化、老化、饱和等因素而偏离标称值。此外,观测器对初始值设置较为敏感,不合适的初始值可能导致观测效果不佳。
解决方法:
在线参数辨识:设计参数自适应机制,实时更新电机参数估计,以减少参数不确定性的影响。例如,利用电机运行过程中的电流、电压信号进行在线辨识。
稳健的初始值设定:采用智能初始化策略,如基于电机空载运行数据的自动初始化、基于电机稳态特性的初始值推算等,确保观测器在启动阶段即可快速收敛至稳定工作状态。
挑战4:噪声抑制与信号处理
挑战描述:实际采集到的电压、电流信号中可能存在各种噪声(如电源噪声、电磁干扰等),这些噪声会影响磁链观测的精度。
解决方法:
数字滤波技术:采用数字滤波器(数字过采样等)对输入信号进行预处理,有效抑制高频噪声,保持信号的有用成分。
硬件抗干扰设计:优化传感器布局、选择抗干扰能力强的传感器和信号调理电路,减少噪声源头。在电路设计上采用屏蔽、接地等措施,增强系统的抗电磁干扰能力。
死区非线性补偿:逆变器死区非线性特征会导致电压指令与实际电压出现偏差,可通过对逆变器死区非线性特征进行实时补偿((离线标定 + 查表)或者(在线估计+补偿)) ,减小电压指令与实际电压之间的偏差大小,从而可以提高观测器的估计精度。
通过上述挑战的应对策略,工程上可以尽可能地提升有源磁链观测器的性能,同时兼顾成本和计算资源的限制,实现极致的性价比。随着控制理论的发展与计算技术的进步,未来有望进一步优化观测器设计,使之更加适应复杂、苛刻的工业应用场景。
这篇关于电机控制系列模块解析(18)—— 位置观测器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







