本文主要是介绍电磁仿真--基本操作-CST-(5),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1. 简介
2. 具体操作
2.1 设置WCS坐标系
2.2 使用 Brick 工具
2.3 删除对称部分
3. 总结
1. 简介
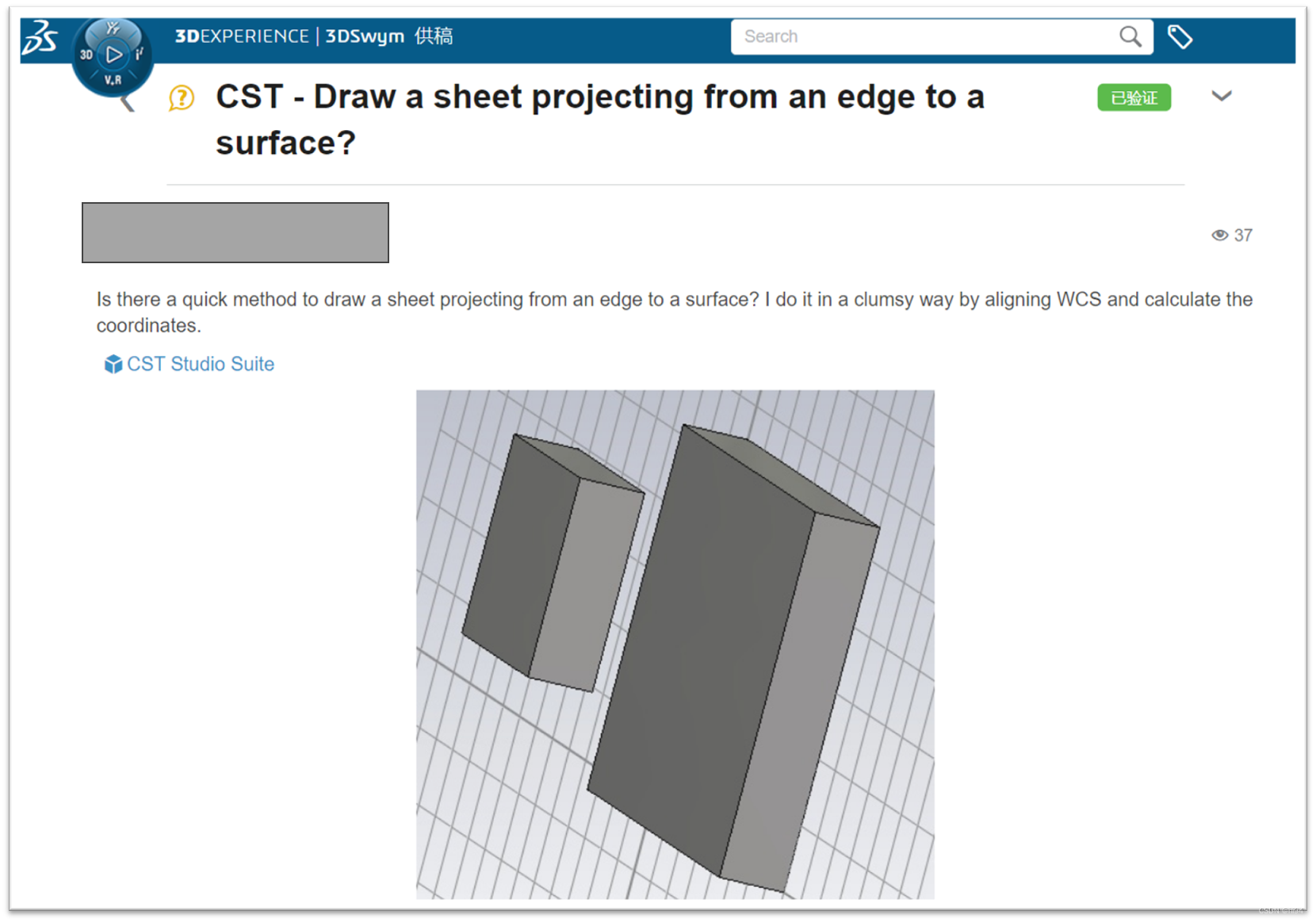
在进行EMC仿真时,经常需要满足一些特定的需求,比如在一个完整的GND平面上方布置金属走线,并在金属走线和GND之间施加Discrete Port端口。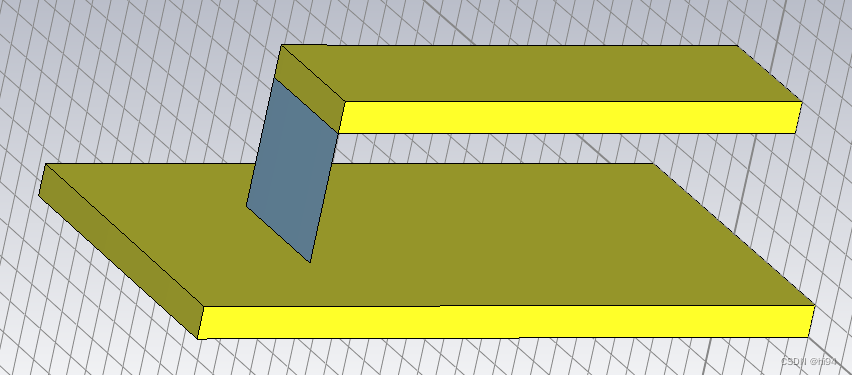
一开始,我尝试了一些笨拙的方法,比如手动计算四个点的坐标,然后使用Brick工具绘制Sheet。这种方式不仅费时费力,而且容易出错,影响到仿真结果的准确性。
后来,我在达索3DEXPERIENCE论坛上发表了这个问题,幸运的是,有一些热心的人给予了回复。不过,由于官方回复需要一定时间,所以不能指望立即得到解决方案。
2. 具体操作
2.1 设置WCS坐标系
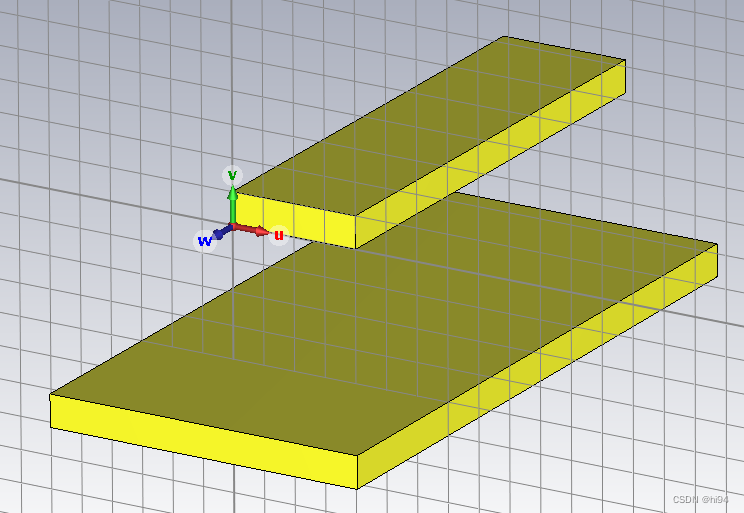
在金属走线的实体上使用Local WCS即可,最好选择该平面左下角,如下图所示。
2.2 使用 Brick 工具
使用 Brick 工具绘制一个厚度为0的实体(Sheet)。
划重点:
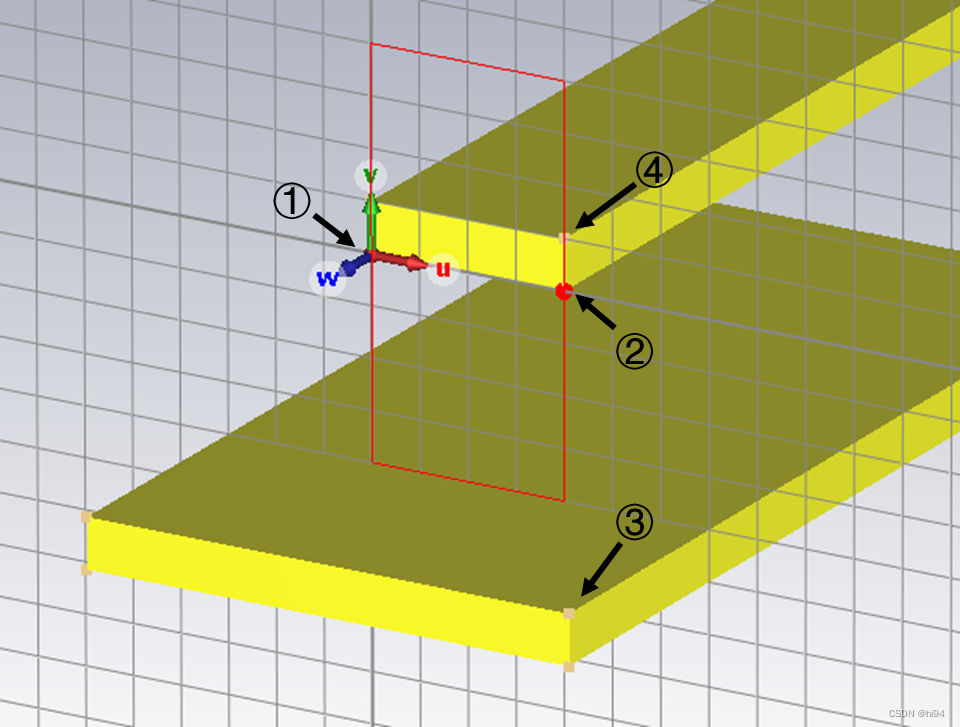
- 使用Pick Points (快捷键P),选择特征点。
- 通过1、2、4三个点,确定在UV平面绘制Sheet。
- 通过3这个点,确定金属走线到GND平面的距离。
1、2、4三个点的顺序不重要,甚至可以选取1、2、2(重复选择2这个点)。但是3这个点是必须的。同学可以自行探索。
2.3 删除对称部分
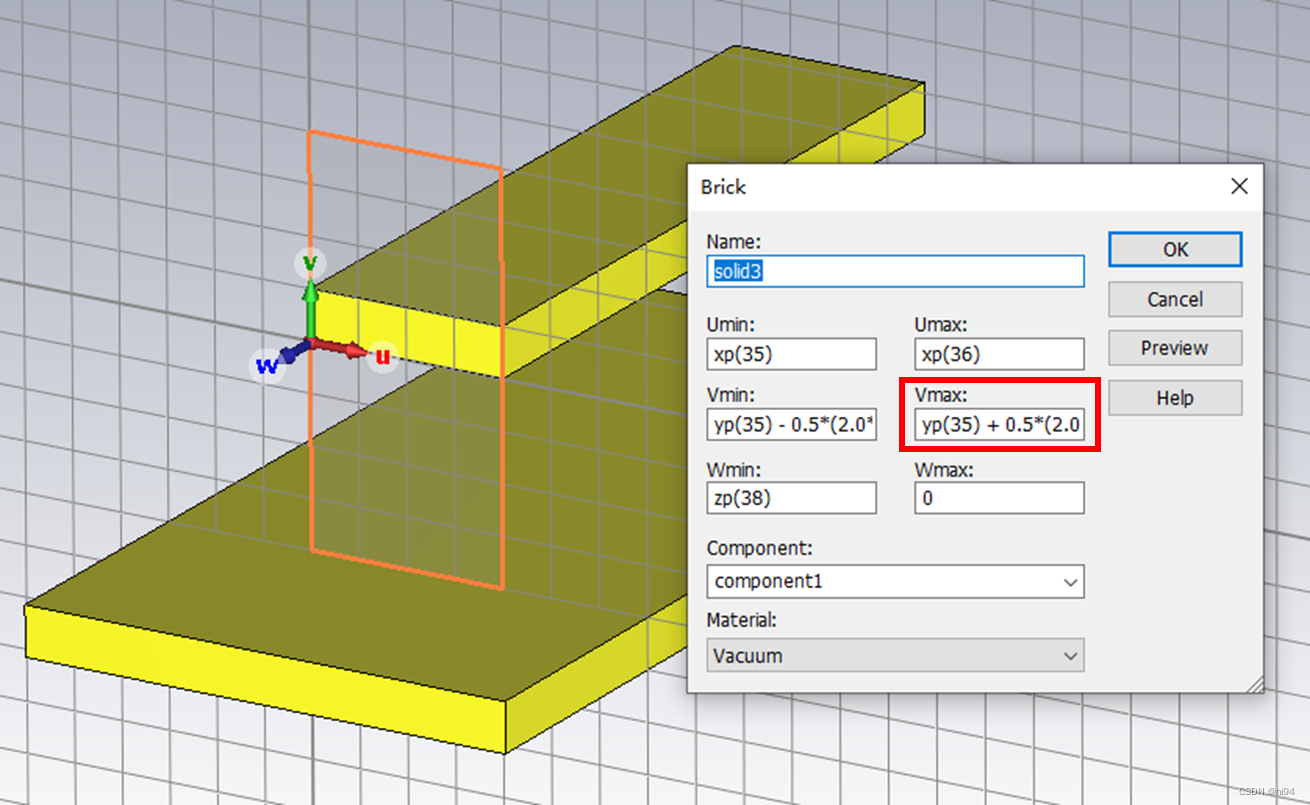
当上一个步骤的四个点设置完毕,可以看到如下 Brick 对话框,将其中的 Vmax 设置为0。
我们得到最终的图形:
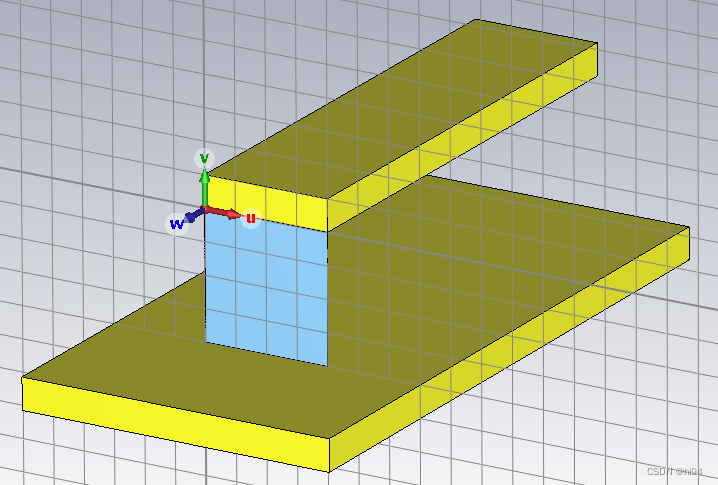
然后恢复WCS坐标即可。
3. 总结
在进行EMC仿真时,建模的重要性不可忽视。一个准确、完整的模型是确保仿真结果准确性的基础。在上述情境中,正确建模金属走线和Discrete Port端口的位置、尺寸和几何形状对于模拟电磁场的传播和干扰至关重要。
正确的建模可以帮助我们准确地模拟电磁波的传播路径、反射和干扰情况,从而更好地了解系统的电磁兼容性,并采取相应的措施来减少电磁干扰。如果建模不准确或不完整,将会导致仿真结果的失真,从而影响到最终的设计方案和决策。
因此,在进行EMC仿真时,建模过程应该被视为至关重要的一步。我们需要花费足够的时间和精力来确保模型的准确性和完整性,这样才能够得到可靠的仿真结果,为设计和优化提供可靠的支持和指导。
在实际操作中,我首先尝试了手动计算坐标并使用Brick工具绘制Sheet的方法,但这种方式既费时费力,又容易出错,可能会影响仿真结果的准确性。
随后,我们在达索3DEXPERIENCE论坛上发布了这个问题,并得到了一些热心人的回复。虽然官方回复需要一定时间,但这并不妨碍我们继续探索解决方案。
具体操作中,我们设置了WCS坐标系,并在金属走线的实体上使用Local WCS。然后,我们使用Brick工具绘制了厚度为0的Sheet,通过选取特定的特征点,确定了Sheet在UV平面上的位置,并确定了金属走线到GND平面的距离。最后,我们删除了对称部分,得到了最终的图形。
这篇关于电磁仿真--基本操作-CST-(5)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








