本文主要是介绍第十五弹 ROS中的坐标系管理系统,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
下面这篇文章来自古月大佬:
ROS探索总结(十八)——重读tf
还有其他的大佬的:
ROS中TF广播和监听个人理解及消息查找
ROS学习之tf基本用法
ROS TF 简介
1.机器人中的坐标变换
TF功能包是用来管理机器人系统中的各个坐标系。坐标运算都已经封装。默认会记住10秒之内坐标系之间的关系。
TF坐标的实现:广播TF变换、监听TF变换
- 安装功能包:
sudo apt-get install ros-melodic-turtle-tf- 启动功能包
roslaunch turtle_tf turtle_tf_demo.launchroslaunch是ros自带的一个库,使用roslaunch可以同时运行多个节点,通过编写launch文件来配置各个节点。详情可见:ROS学习笔记(二) :使用roslaunch,在下节,古月大佬会讲解。
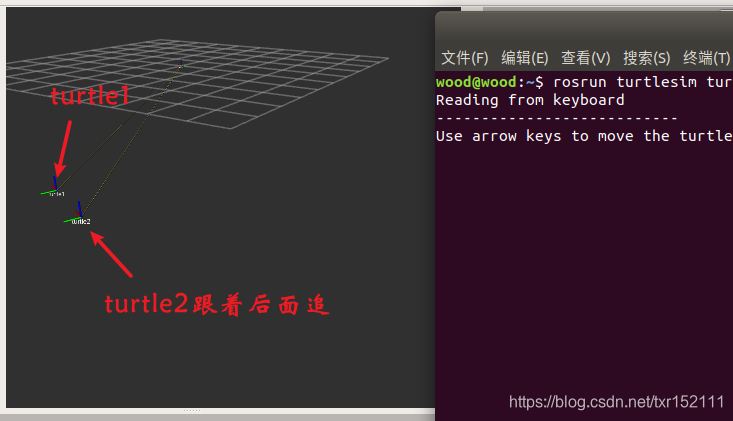
- 追随运动
使用键盘控制一只海龟:
rosrun turtlesim turtle_teleop_key 
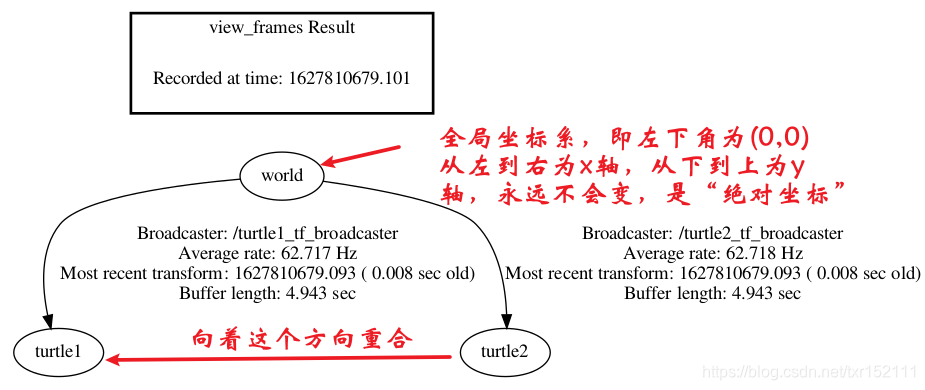
- 查看当前坐标之间的位置关系
rosrun tf view_frames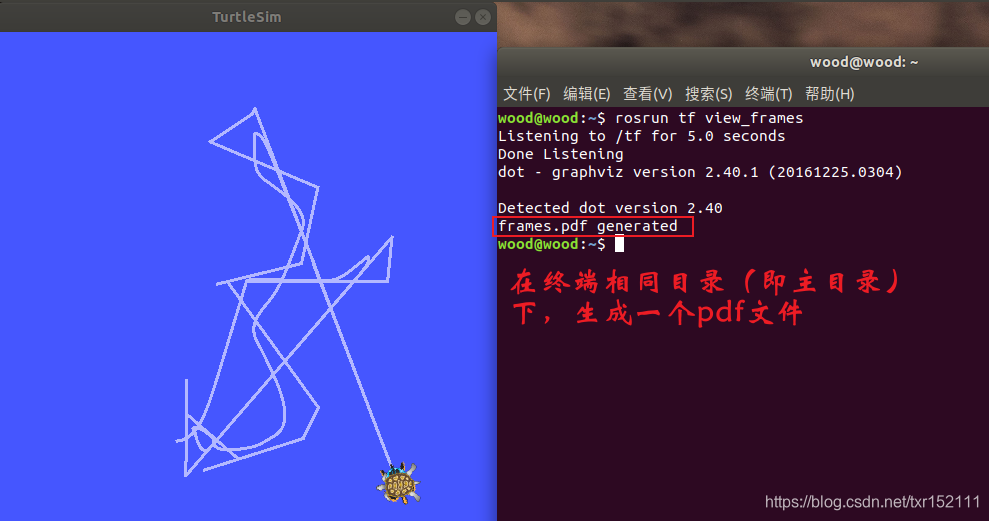

- 获取两个坐标系的位置关系
rosrun tf tf_echo turtle1 turtle2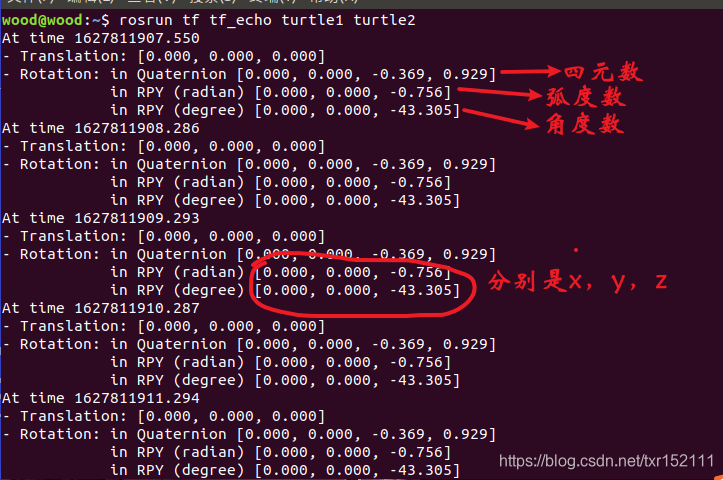
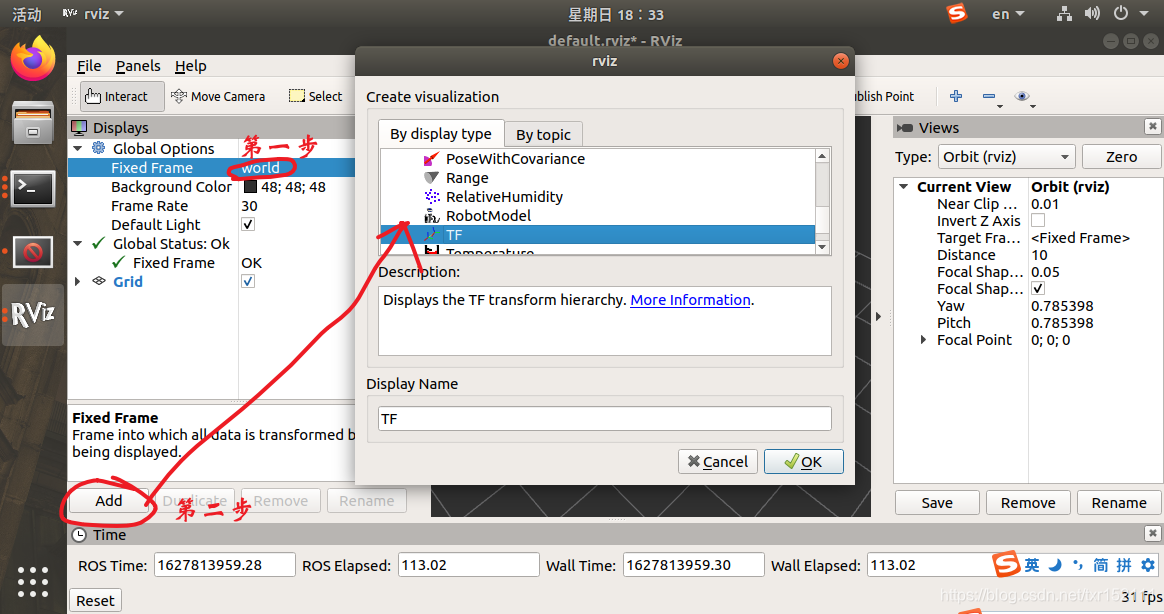
- rviz可视化工具(三维可视化平台)
rosrun rviz rviz -d 'rospack find turtle_tf '/rviz/turtle_rviz.rvi
修改一下参数:
 用键盘控制海龟动,这个可视化里也是跟着动。
用键盘控制海龟动,这个可视化里也是跟着动。
2.拓展阅读
四元数和旋转(Quaternion & rotation):https://zhuanlan.zhihu.com/p/78987582
数字化方法基础(四)_矩阵操作:https://blog.csdn.net/weixin_44543463/article/details/102727509
这篇关于第十五弹 ROS中的坐标系管理系统的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!