本文主要是介绍使用逆滤波算法deconvwnr恢复图像回复图像时,产生了很多横竖条纹。解决办法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
使用逆滤波算法deconvwnr恢复图像时,产生了很多横竖条纹。解决办法
原来的代码
% 清除工作空间并关闭所有图形窗口
clear; clc; close all;% 读取原始图像
original_image = imread('pic3.jpg');% 显示原始图像
subplot(131);
imshow(original_image);
title('Original Image');% 创建模糊核(PSF)
PSF = fspecial('gaussian', [5 5], 2); % 高斯模糊核
blurred_image = imfilter(original_image, PSF); % 模糊图像% 显示模糊图像
subplot(132);
imshow(blurred_image);
title('Blurred Image');% 估计噪声方差
estimated_noise_variance = 0.0001; % 估计的噪声方差% 使用逆滤波算法deconvwnr恢复图像
restored_image = deconvwnr(blurred_image, PSF, estimated_noise_variance);% 显示恢复后的图像
subplot(133);
imshow(restored_image);
title('Restored Image');结果图:
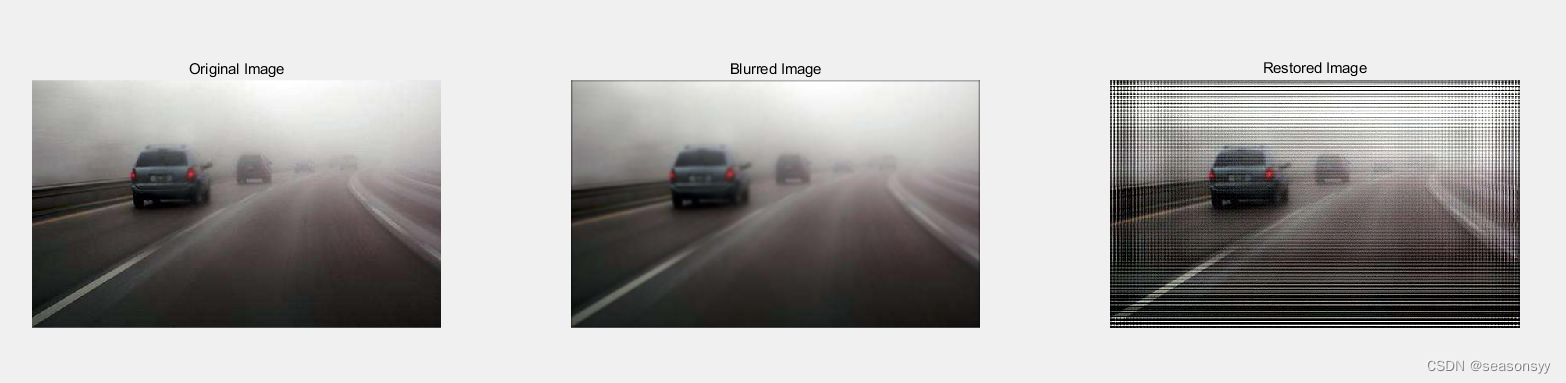
横竖条纹可能是由于逆滤波算法的过度放大导致的,这是常见的问题之一。在处理模糊和噪声的图像时,逆滤波容易放大高频噪声,从而产生这种条纹效应。为了解决这个问题,可以尝试以下方法之一:
1.正则化参数调整:逆滤波算法通常有一个正则化参数,用于控制放大高频噪声的程度。通过调整正则化参数,可以尝试减轻条纹效应。
2.使用其他复原算法:除了逆滤波算法外,还有许多其他复原算法可供选择,如Richardson-Lucy 算法、Wiener 滤波器等。尝试使用不同的算法可能会获得更好的结果。
3.处理模糊核不确定性:如果模糊核的准确性不高或无法准确估计,可以尝试使用一些更复杂的方法来处理模糊核的不确定性,如盲去卷积算法。
4.后处理:对恢复的图像进行后处理操作,如边缘增强、降噪等,以改善图像质量并减轻条纹效应。
尝试调整正则化参数来减轻条纹效应,代码如下:
% 使用逆滤波算法deconvwnr恢复图像,并调整正则化参数
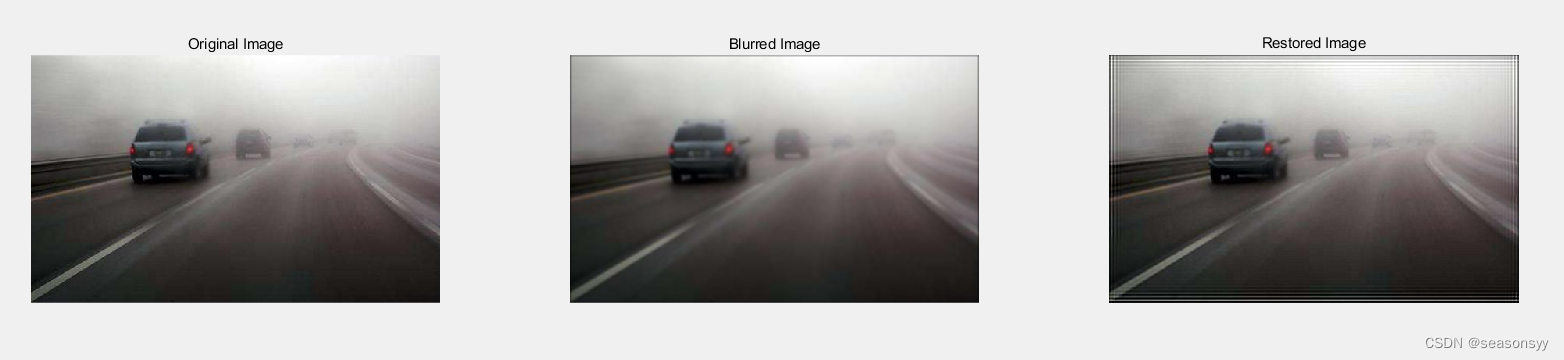
restored_image = deconvwnr(blurred_image, PSF, estimated_noise_variance, 0.01);% 显示恢复后的图像
subplot(133);
imshow(restored_image);
title('Restored Image');
结果:横竖条纹减少
图像:
可以尝试不同的正则化参数值,以找到最适合所选图像的结果。
如果问题仍然存在,可能需要尝试其他复原算法或进行更复杂的处理。
注:
本文所用方法对于所选图像进行图像复原操作效果不是很明显,代码还有待优化。
本文主要侧重点:解决图像产生的条纹,调整正则化参数来减轻条纹效应。
这篇关于使用逆滤波算法deconvwnr恢复图像回复图像时,产生了很多横竖条纹。解决办法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





