本文主要是介绍锅炉过热蒸汽的温度PID控制simulink仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
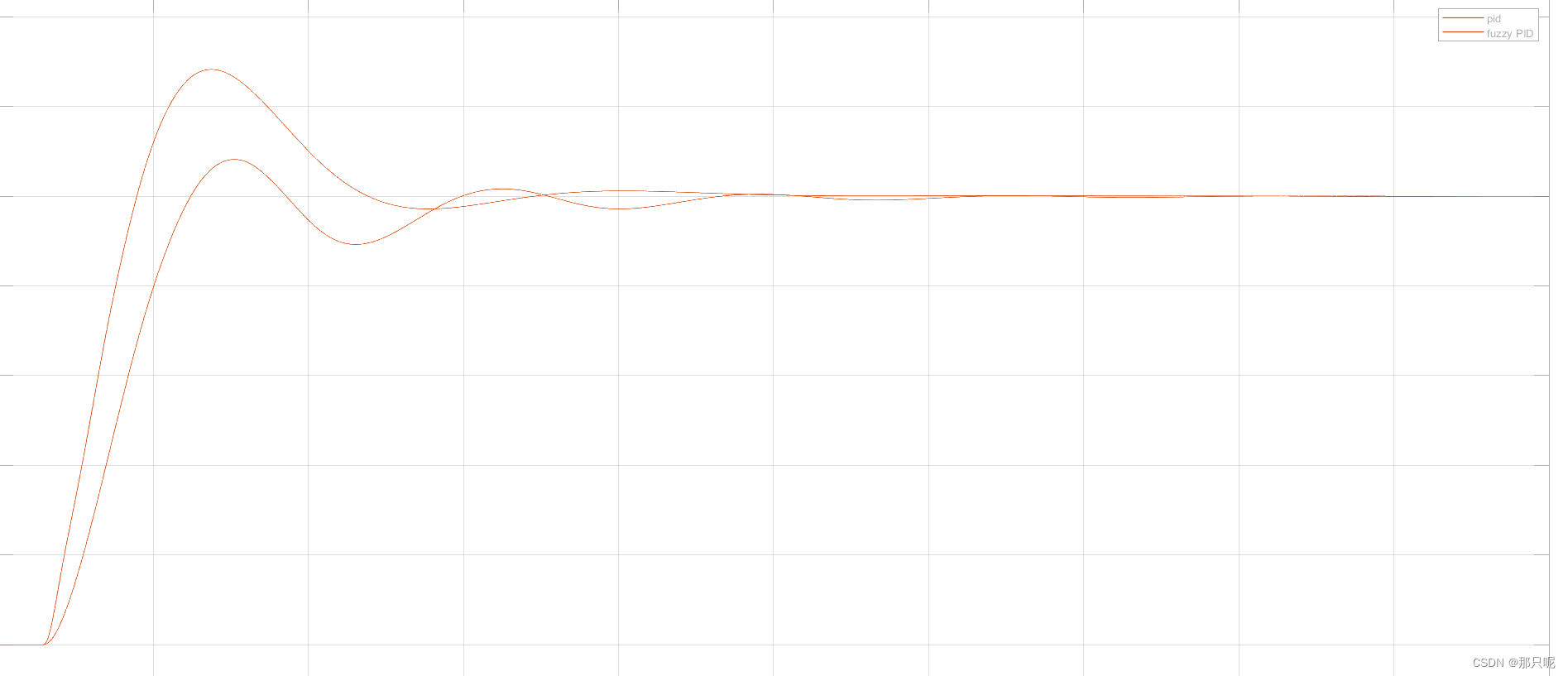
锅炉过热蒸汽的温度模糊PiD控制 simulink仿真,模糊PID与普通PID对比分析,包括论文和运行步骤!
随着自动化技术与电子技术的发展,微型计算机、工业专用控制计算机的出现以及广泛的应用,为锅炉控制领域开辟了一片广阔的天地。运用计算机技术的高效率、高可靠性、全自动的微机工业测控系统开始日益得到重视。80年代后期至今,国内外已经陆续出现了各种各样的锅炉微机测控系统,明显的改善了锅炉的运行状况,但还不够完善。
随着控制理论的发展,PID控制已经广泛应用到了锅炉的过热蒸汽温度控制中。国内外广大专家学者和现场工作人员主要关注的热点问题是:面对具有大延迟、工况参数对模型参数有较大影响的过热汽温,如何稳定、准确、快速地对其进行有效的控制。过热汽温对象具有时变性、不确定性、非线性等特点,并且会有一些随机的扰动产生,工艺流程复杂,使其难以建立精确的数学模型。同时还具有延迟和惯性较大等特性。所以常规PID控制方法更难以取得满意的控制效果。
因此,许多火电厂都希望能有一种理想的控制策略实现对过热汽温的有效控制。随着控制理论的不断发展,控制领域出现了许多新的控制方法,如预测控制方法、自适应控制方法、各种智能控制方法(包括模糊控制、神经网络、遗传算法等等)。除此之外还有综合了几种控制形式的混合式智能控制器等多种形式,如以模糊控制为基础的专家模糊控制系统,最常见的是以常规PID数字控制为基础,通过专家系统在线实时整定PID控制参数,即智能自适应PID控制器[2]。一直以来,国内外许多专家学者都在积极研究将这些新的控制算法应用到过热蒸汽温度的控制上。目前比较有效的是模糊--PID复合串级控制系统,较好实现对过热蒸汽温度的控制。
模型获取链接:锅炉过热蒸汽的温度PID控制simulink仿真



这篇关于锅炉过热蒸汽的温度PID控制simulink仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





