本文主要是介绍强化学习实例分析:CartPole【Monte Carlo】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
强化学习笔记
主要基于b站西湖大学赵世钰老师的【强化学习的数学原理】课程,个人觉得赵老师的课件深入浅出,很适合入门.
第一章 强化学习基本概念
第二章 贝尔曼方程
第三章 贝尔曼最优方程
第四章 值迭代和策略迭代
第五章 强化学习实例分析:GridWorld
第六章 蒙特卡洛方法
第七章 Robbins-Monro算法
第八章 多臂老虎机
第九章 强化学习实例分析:CartPole
文章目录
- 强化学习笔记
- 一、问题描述
- 1 创建环境
- 2 Take actions
- 3 States Discretization
- 二、 On-policy first-visit MC control
- 三、完整代码
- 参考资料
在第六章 蒙特卡洛方法中我们学习了蒙特卡洛方法,这一节我们结合强化学习工具包gym中的CartPole问题来复现蒙特卡洛方法中的On-policy first-visit MC control算法。CartPole问题是一个经典的强化学习示例,旨在通过控制一个倒立摆的平衡杆,使其保持直立状态。Monte Carlo方法则是解决这类问题的一种策略。
在本文中,我们将深入探讨CartPole问题,并重点分析Monte Carlo方法在解决这一问题中的应用。我们将从基本概念出发,介绍CartPole问题的背景和目标,然后详细解释Monte Carlo方法的原理和实现方式。通过实例分析,我们将揭示Monte Carlo方法如何在CartPole问题中发挥作用,以及它是如何帮助智能体学习和改进其策略的。
一、问题描述
1 创建环境
CartPole问题描述如下:
- 一根杆子由一个非驱动的关节连接到一辆小车上,小车沿着一条无摩擦的轨道移动。
- 该系统通过对推车施加+1或-1的力来控制。
- Pole开始直立,我们的目的是让它保持直立。
- 柱子保持直立的每一个时间步都将提供+1的奖励。
- 当杆子偏离垂直方向超过15度,或推车偏离中心方向超过2.4个单位时,这一episode结束。
- 更多信息(参见GITHUB上的源代码)。
下面的例子展示了这个测试环境的基本用法:
import gym
import numpy as np
import matplotlib.pyplot as plt
env = gym.make('CartPole-v1')
observation = env.reset() ##Initial an episodeprint("Inital observation is {}".format(observation))print("\nThis means the cart current position is {}".format(observation[0][0]), end = '')
print(" with velocity {},".format(observation[0][1]))print("and the pole current angular position is {}".format(observation[0][2]), end = '')
print(" with angular velocity {},".format(observation[0][3]))输出为:

2 Take actions
使用env.step(action)执行操作,action取0或1:0:“向左”;1:“向右”.
print("Current observation is {}".format(observation))action = 0 #go left
observation, reward, done, info,_ = env.step(action)print("\nNew observation is {}".format(observation))
print("Step reward is {}".format(reward))
print("Did episode just ends? -{}".format(done)) 输出如下,我们可以看到位置确实向左移动了。

3 States Discretization
类DiscreteObs()将观测空间离散化为离散状态空间,表格法需要对观测空间进行离散化。
class DiscretObs():def __init__(self, bins_list):self._bins_list = bins_listself._bins_num = len(bins_list)self._state_num_list = [len(bins)+1 for bins in bins_list]self._state_num_total = np.prod(self._state_num_list)def get_state_num_total(self):return self._state_num_totaldef obs2state(self, obs):if not len(obs)==self._bins_num:raise ValueError("observation must have length {}".format(self._bins_num))else:return [np.digitize(obs[i], bins=self._bins_list[i]) for i in range(self._bins_num)]def obs2idx(self, obs):state = self.obs2state(obs)return self.state2idx(state)def state2idx(self, state):idx = 0for i in range(self._bins_num-1,-1,-1):idx = idx*self._state_num_list[i]+state[i]return idxdef idx2state(self, idx):state = [None]*self._bins_numstate_num_cumul = np.cumprod(self._state_num_list)for i in range(self._bins_num-1,0,-1):state[i] = idx/state_num_cumul[i-1]idx -=state[i]*state_num_cumul[i-1]state[0] = idx%state_num_cumul[0]return state# Recommended Discretization for Carpole-v1 when using Monte-Carlo methods
bins_pos = np.linspace(-2.4,2.4,40) # position
bins_d_pos = np.linspace(-3,3,5) # velocity
bins_ang = np.linspace(-0.2618,0.2618,40) # angle
bins_d_ang = np.linspace(-0.3,0.3,5) # angular velocitydobs = DiscretObs([bins_pos,bins_d_pos,bins_ang,bins_d_ang])
observation = env.reset()[0]state = dobs.obs2state(observation)
idx = dobs.obs2idx(observation)print("Current position of the cart is {:.4f}\n".format(observation[0]))
print("Current velocity of the cart is {:.4f}\n".format(observation[1]))
print("Current angular position of the pole is {:.4f} rad\n".format(observation[2]))
print("Current angular velocity of the pole is {:.4f} rad\n".format(observation[3]))print("which are mapped to state {}, with corresponding index {}".format(state,idx))
输出如下,我们将连续的状态值离散化,映射到整数空间:
二、 On-policy first-visit MC control
下面我们就可以来实现在蒙特卡洛方法 介绍的On-policy first-visit MC control算法。get_action函数实现 ε \varepsilon ε-greedy策略,基于当前的状态和估计的 Q Q Q返回应该采取的动作。
def get_action(current_state, Q, epsilon):if np.random.random() < epsilon:return env.action_space.sample() # Random actionelse:return np.argmax(Q[current_state]) # Greedy action
update_Q函数根据每个episode的数据来更新 Q Q Q的估计值,采用的是first-visit,只用第一次出现的(s,a)来更新 Q ( s , a ) Q(s,a) Q(s,a):
def update_Q(Q, returns, Returns, observation_list, action_list, gamma=0.99): G = 0ob_act_list = [(dobs.obs2idx(observation_list[i]), action_list[i]) for i in range(len(observation_list))]for i in range(len(returns)-1,-1,-1):obs = observation_list[i]act = action_list[i]state_idx = dobs.obs2idx(obs)index = ob_act_list.index((state_idx,act)) # find the first occurence of (s,a) in the episodeif i == index: # if (s,a) is not visited in the episode before,i.e. first-visitG = gamma * G + returns[i]if (state_idx, act) not in Returns:Returns[(state_idx, act)] = (G, 1)else:Returns[(state_idx, act)] = (Returns[(state_idx, act)][0] + G, Returns[(state_idx, act)][1] + 1)else:continueQ[state_idx][act] = Returns[(state_idx, act)][0] / Returns[(state_idx, act)][1] # q(s,a) = average of Returns(s,a)return Q下面我们来进行实验:
# Initialize environment and parameters
env = gym.make('CartPole-v1',render_mode='rgb_array')
epsilon_start = 0.3
epsilon_decay_rate = 0.97
num_episodes = 40000
set_size = 2000
set_num = num_episodes // set_size
Q = np.random.uniform(low=-1, high=1, size=(dobs.get_state_num_total(), env.action_space.n))rewards = []
epsilon = epsilon_start
Returns = {}for ep in range(num_episodes):observation = env.reset()[0]done = Falseobservation_list = []action_list = []returns = []while not done:current_state = dobs.obs2idx(observation)action = get_action(current_state, Q, epsilon)observation_list.append(observation)action_list.append(action)observation, reward, done, info,_ = env.step(action)returns.append(reward)Q = update_Q(Q, returns, Returns, observation_list, action_list)rewards.append(sum(returns))if (ep + 1) % set_size == 0:epsilon *= epsilon_decay_rate # Decay epsilon# Every 2000 episodes, compute the average rewardif (ep + 1) % set_size == 0:print(f"Average reward for episodes {ep-set_size+2}-{ep+1}: {np.mean(rewards[-set_size:])}")# Compute and plot average rewards per set
average_rewards_per_set = [np.mean(rewards[i:i+set_size]) for i in range(0, num_episodes, set_size)]
plt.figure(figsize=(12, 6),dpi=150)
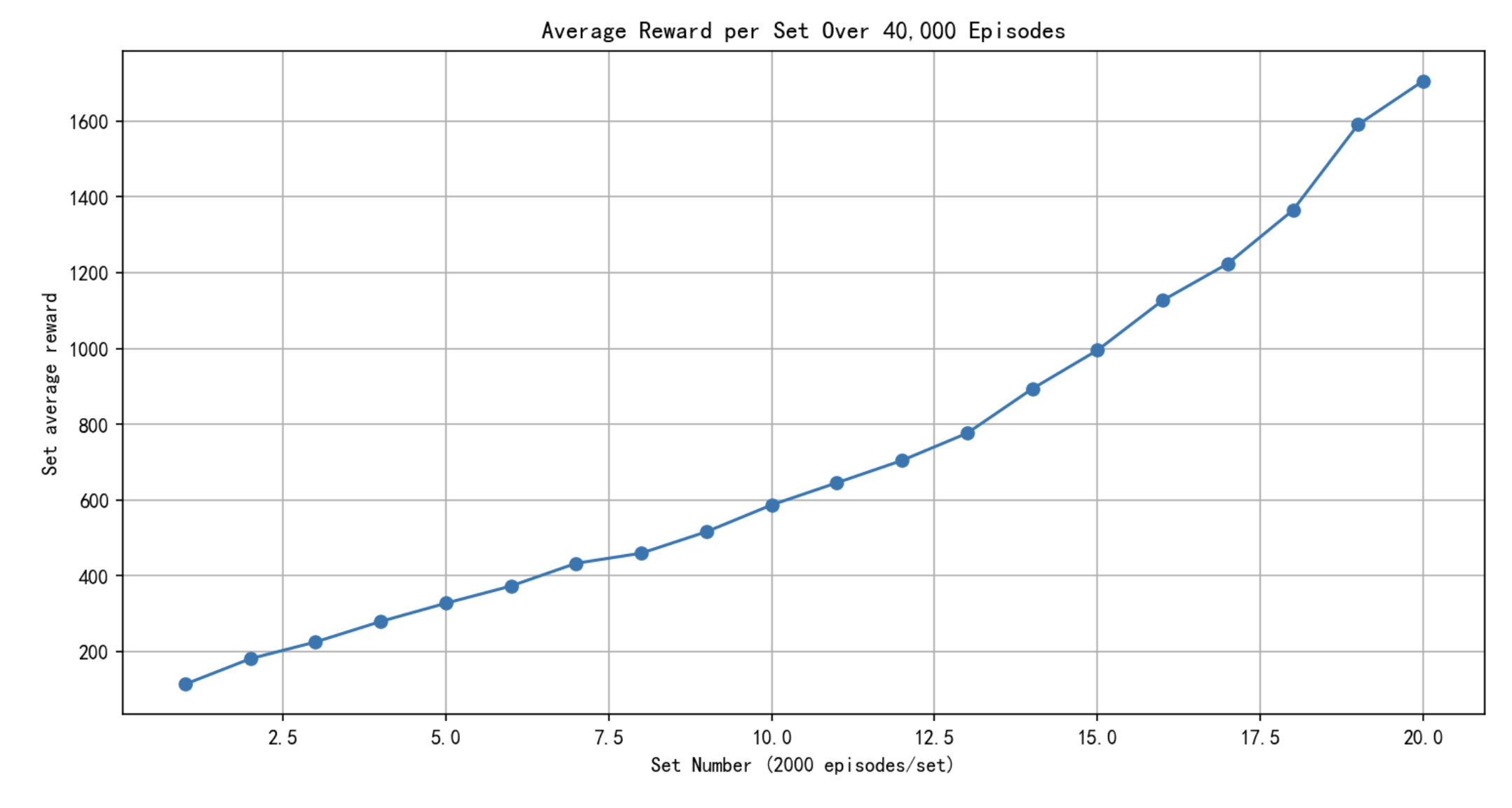
plt.plot(range(1, set_num + 1), average_rewards_per_set, marker='o', linestyle='-')
plt.xlabel('Set Number (2000 episodes/set)')
plt.ylabel('Set average reward')
plt.title('Average Reward per Set Over 40,000 Episodes')
plt.grid(True)
plt.show()
经过半个小时的训练,总算结束,如下图所示,我们可以看到随着实验次数增加,我们每2000个episode得到的奖励越来越多,说明我们对 Q Q Q的估计越来越准确。但我们也能看到蒙特卡洛法的缺点,效率低!对连续空间进行离散化,会导致维度灾难和样本效率低下,在这个例子中充分的体现了这一点。
下面我们利用现在学习到的 Q Q Q值采用贪心算法来控制模型,发现在很长时间还是能够保证pole直立的。
# Use greedy policy of the trained Q function to control the carpole for 100 episode,
env = gym.make('CartPole-v1',render_mode='rgb_array')
observation = env.reset()[0]# create a figure and axis to display the environment
plt.figure()
img = plt.imshow(env.render())
while 1:img.set_data(env.render()) # update the imagedisplay.display(plt.gcf())display.clear_output(wait=True)current_state = dobs.obs2idx(observation) # discretize the observation spaceaction = np.argmax(Q[current_state]) # choose action by greedy policy of the trained Qobservation, reward, done, info, _ = env.step(action)if done:break
cartpole
三、完整代码
import gym
import matplotlib.pyplot as plt
from IPython import display
import numpy as npclass DiscretObs():def __init__(self, bins_list):self._bins_list = bins_listself._bins_num = len(bins_list)self._state_num_list = [len(bins)+1 for bins in bins_list]self._state_num_total = np.prod(self._state_num_list)def get_state_num_total(self):return self._state_num_totaldef obs2state(self, obs):if not len(obs)==self._bins_num:raise ValueError("observation must have length {}".format(self._bins_num))else:return [np.digitize(obs[i], bins=self._bins_list[i]) for i in range(self._bins_num)]def obs2idx(self, obs):state = self.obs2state(obs)return self.state2idx(state)def state2idx(self, state):idx = 0for i in range(self._bins_num-1,-1,-1):idx = idx*self._state_num_list[i]+state[i]return idxdef idx2state(self, idx):state = [None]*self._bins_numstate_num_cumul = np.cumprod(self._state_num_list)for i in range(self._bins_num-1,0,-1):state[i] = idx/state_num_cumul[i-1]idx -=state[i]*state_num_cumul[i-1]state[0] = idx%state_num_cumul[0]return state# Recommended Discretization for Carpole-v1 when using Monte-Carlo methods
bins_pos = np.linspace(-2.4,2.4,40) # position
bins_d_pos = np.linspace(-3,3,5) # velocity
bins_ang = np.linspace(-0.2618,0.2618,40) # angle
bins_d_ang = np.linspace(-0.3,0.3,5) # angular velocitydobs = DiscretObs([bins_pos,bins_d_pos,bins_ang,bins_d_ang])def get_action(current_state, Q, epsilon):if np.random.random() < epsilon:return env.action_space.sample() # Random actionelse:return np.argmax(Q[current_state]) # Greedy actiondef update_Q(Q, returns, Returns, observation_list, action_list, gamma=0.99): G = 0ob_act_list = [(dobs.obs2idx(observation_list[i]), action_list[i]) for i in range(len(observation_list))]for i in range(len(returns)-1,-1,-1):obs = observation_list[i]act = action_list[i]state_idx = dobs.obs2idx(obs)index = ob_act_list.index((state_idx,act)) # find the first occurence of (s,a) in the episodeif i == index: # if (s,a) is not visited in the episode before,i.e. first-visitG = gamma * G + returns[i]if (state_idx, act) not in Returns:Returns[(state_idx, act)] = (G, 1)else:Returns[(state_idx, act)] = (Returns[(state_idx, act)][0] + G, Returns[(state_idx, act)][1] + 1)else:continueQ[state_idx][act] = Returns[(state_idx, act)][0] / Returns[(state_idx, act)][1] # q(s,a) = average of Returns(s,a)return Q# Initialize environment and parameters
env = gym.make('CartPole-v1',render_mode='rgb_array')
epsilon_start = 0.3
epsilon_decay_rate = 0.97
num_episodes = 40000
set_size = 2000
set_num = num_episodes // set_size
Q = np.random.uniform(low=-1, high=1, size=(dobs.get_state_num_total(), env.action_space.n))rewards = []
epsilon = epsilon_start
Returns = {}for ep in range(num_episodes):observation = env.reset()[0]done = Falseobservation_list = []action_list = []returns = []while not done:current_state = dobs.obs2idx(observation)action = get_action(current_state, Q, epsilon)observation_list.append(observation)action_list.append(action)observation, reward, done, info,_ = env.step(action)returns.append(reward)Q = update_Q(Q, returns, Returns, observation_list, action_list)rewards.append(sum(returns))if (ep + 1) % set_size == 0:epsilon *= epsilon_decay_rate # Decay epsilon# Every 2000 episodes, compute the average rewardif (ep + 1) % set_size == 0:print(f"Average reward for episodes {ep-set_size+2}-{ep+1}: {np.mean(rewards[-set_size:])}")# Compute and plot average rewards per set
average_rewards_per_set = [np.mean(rewards[i:i+set_size]) for i in range(0, num_episodes, set_size)]
plt.figure(figsize=(12, 6),dpi=150)
plt.plot(range(1, set_num + 1), average_rewards_per_set, marker='o', linestyle='-')
plt.xlabel('Set Number (2000 episodes/set)')
plt.ylabel('Set average reward')
plt.title('Average Reward per Set Over 40,000 Episodes')
plt.grid(True)
plt.show()
参考资料
- Sutton, Richard S., and Andrew G. Barto. Reinforcement learning: An introduction. MIT press, 2018.
这篇关于强化学习实例分析:CartPole【Monte Carlo】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







