本文主要是介绍电磁仿真--S参数测试中的参考阻抗,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1. 背景介绍
2. 参考阻抗
2.1 简单二端口网络
2.2 离散端口模型
3. 阻抗归一化的指定值
4. 总结
1. 背景介绍
当我们使用网络分析仪来测量S参数,或借助示波器来检测高速信号时,选择仪器系统预设的参考阻抗变得异常简便,通常这个值是50Ω。在这种情况下,我们往往不会过多考虑阻抗选择的问题。然而,当转向使用仿真软件时,情况就完全不同了。在仿真环境中,你拥有自由设定阻抗的能力,且可选范围广泛,这就引入了更多的选择与考量。
当然,如果使用波导端口,往往无需考虑特征阻抗,它依赖于波导的尺寸、形状、所传输的模式(如TE模式、TM模式等)以及介质的电磁属性,而非传统意义上的电流和电压。
本文讨论的是离散端口。
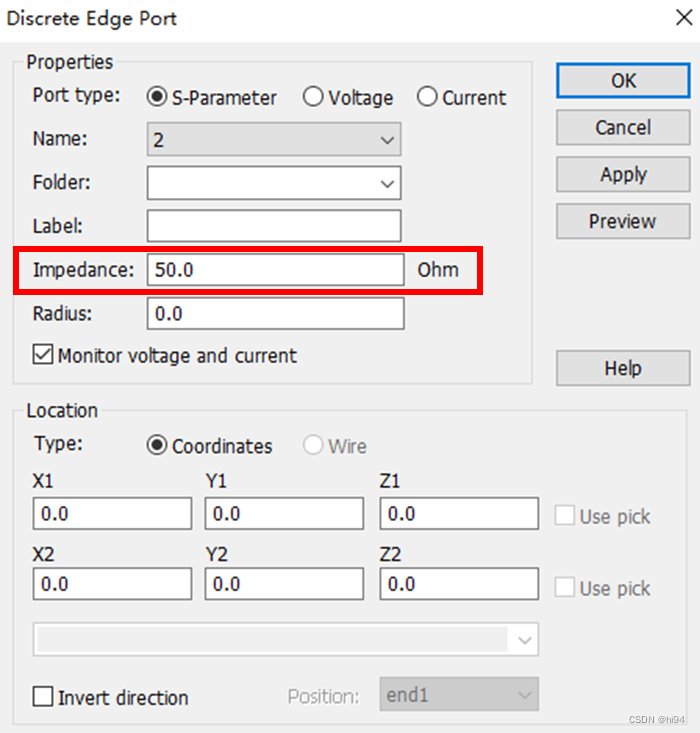
比如,我们可以在端口定义中设定阻抗:
或者,我们也可以在求解器中,将阻抗归一化到指定阻抗:
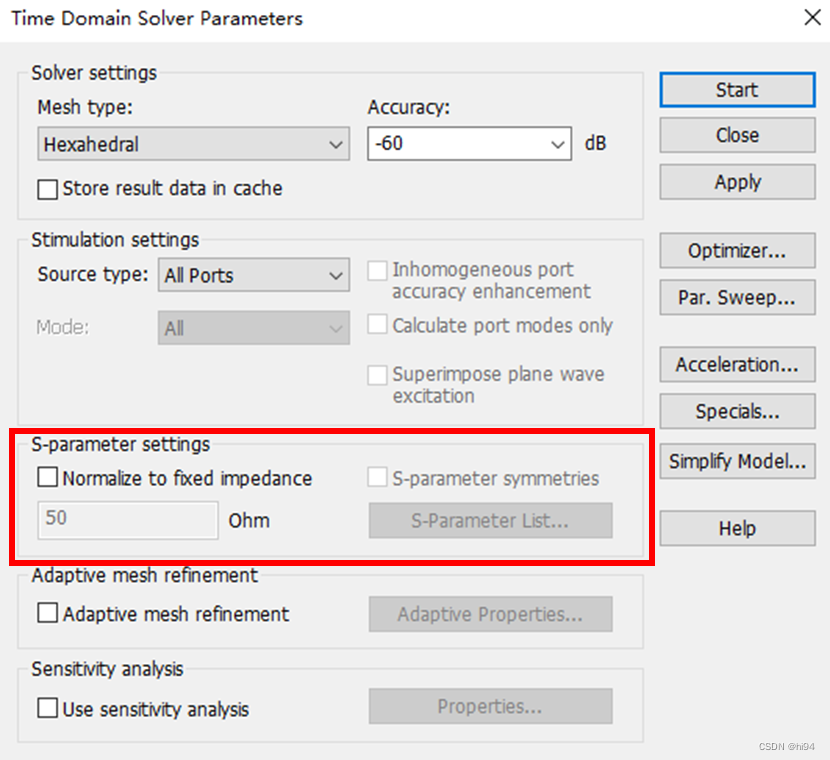
这些设定都有什么意图?又有什么区别呢?
2. 参考阻抗
S参数描述了多端口网络中电磁波的反射和透射行为。
反射系数 Γ 可由负载阻抗 Zl 、系统阻抗 Z0 进行计算:
如果一个二端口传输系统的阻抗完全比配(比如50Ω),由公式可知,反射系数线性值为0,对数值为-∞dB,透射系数线性值为1,对数值为0dB。
我们搭建一个简单的系统测试一下。
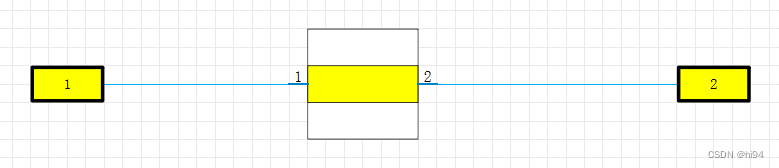
2.1 简单二端口网络
以下系统包含:
- 两个External Port
- 一个Transmission Line
- 新建S-Parameters任务
- 设定Transmission Line长度100mm
- 设定Transmission Line阻抗50Ω
- 仿真开始频率1MHz
- 仿真终止频率1000MHz

查看仿真结果:

仿真结果和手动计算一致,反射系对数值为-∞dB(数线性值为0),透射系数对数值为0dB(线性值为1)。
2.2 离散端口模型
离散端口的实际模型是一个诺顿等效电路。
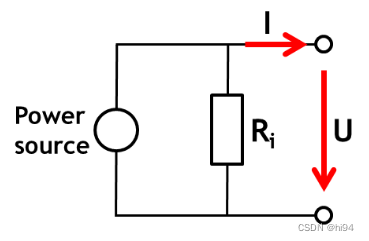
在一个多端口的电子网络中,为了测量或分析网络的传输和反射特性,通常会采取这样的方法:在任一时刻,只有一个端口接收外部信号(被称为“激励”端口),而网络中的其他所有端口则被调整至它们的参考阻抗值。
这样做的目的是简化测量和分析过程。通过只激励一个端口,可以单独测量从该端口到网络中其他端口的信号传输特性(即传输参数),以及该端口本身的反射特性(即反射参数)。而将其他所有端口终止在它们的参考阻抗上,是为了确保这些端口不会对测量结果产生额外的反射或干扰,从而能更准确地反映激励端口与网络其他部分之间的相互作用。
3. 阻抗归一化的指定值
如果启动归一化到指定的阻抗,那么在最终结果中,S参数将会转换到指定值。

这个过程分为两步:
- 使用离散端口指定的参考阻抗计算S参数
- 将S参数归一化到指定值
当然也可以一步到位,直接将离散端口的参考阻抗设置为指定值。
归一化是一种数学处理过程,旨在将数据转换为具有一致基准的形式。在这种情况下,通过将S参数的计算基于特定的阻抗值,可以确保无论实际使用的阻抗是多少,S参数的表示和比较都是基于相同的参考标准。这样,即使在不同的系统或不同的阻抗水平之间,S参数也能提供一个准确和一致的性能衡量标准。
例如,需要将一个系统的S参数从一个参考阻抗(Z1)转换到另一个参考阻抗(Z2)时,可使用以下转换公式:
其中:
- (S) 是原始的S参数(基于阻抗 (Z1))
- (S') 是转换后的S参数(基于阻抗 (Z2))
这个公式适用于将单一的S参数从一个参考阻抗转换到另一个。对于S参数矩阵,包含多个端口时,转换过程涉及到更复杂的矩阵操作,通常包括使用转换矩阵来调整原始S参数矩阵,以反映新的参考阻抗。
将50Ω的S参数转换成75Ω的S参数 | Analog Devices本应用笔记提供的等式和Excel电子表格能够将以50为基准测得的S参数转换为以75为基准的S参数。![]() https://www.analog.com/cn/resources/technical-articles/converting-sparameters-from-50937-to-75937-impedance.html
https://www.analog.com/cn/resources/technical-articles/converting-sparameters-from-50937-to-75937-impedance.html
4. 总结
- S参数表达了在特定参考阻抗下,入射波与反射波或透射波之间的比例关系。
- 为了计算S参数,需要一个参考阻抗作为基准。
- 离开阻抗谈S参数没有意义。
- 可以通过数学方法,将“S参数1-阻抗1”转化为“S参数2-阻抗2”。
- 这种转化的目的,只是为了对比方便,因为S参数被指定为同一个参考阻抗值。
这篇关于电磁仿真--S参数测试中的参考阻抗的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





