本文主要是介绍电动汽车退役锂电池SOC主动均衡控制MATLAB仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
微❤关注“电气仔推送”获得资料(专享优惠)
仿真简介
模型选用双向反激变换器作为主动均衡拓扑电路,均衡策略采用基于SOC的主动均衡策略,旨在解决电动汽车退役锂电池的不一致性问题。模型选用双向反激变换器作为主动均衡拓扑电路。
模型结构完整,配置6节3.5AH的退役锂电池,可实现静置工况与充电工况的SOC均衡。模型主体与主电路参数和参考文献保持一致,值得入门参考学习!
双向反激变换器工作方式
双向反激变换器有三种工作方式:连续导电模式(CCM)、断续导电模式 (DCM)和连续/断续边界导电模式(CCM/DCM)。它们可以实现不同的功能, 从而满足不同的应用需求。CCM模式下,初级侧产生能量大于次级侧消耗能量, 能量传递不平衡会导致产生大量的热,也会导致变压器磁通不一致,磁通积累导 致变压器饱和,最终无法正常工作。DCM模式下,初级侧产生的能量被次级侧 提前消耗,增加了整个电路的功耗也降低了工作效率。CCM/DCM模式下,初级 侧产生的能量完全被次级侧消耗掉,实现了能量的完全传递,既有效率也不增加 功耗。因此,本模型采用CCM/DCM模式来实现双向反激变换器的有效运行。
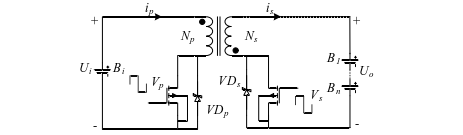
当处于电感/电流连续/断续边界导电模式(CCM/DCM)稳态时,即使忽略变压 器漏感、电路寄生参数以及开关电压纹路的影响,也可以保证系统的正常运行。 对能量从单体电池Bi流向电池组(B1~Bn)的过程进行工作原理分析,其工作模 式如下:
模式一:0~t1。该模式开关管Vp导通,开关管Vs关断,施加在变压器初 级侧两端的电压为Ui,当电流ip通过正极时,它会被转换成磁能,这样就可以 使用变压器的初级励磁电感来进行储存。
模式二:t1~t2。该模式开关管Vs导通,开关管Vp关断,变压器次级侧两 端的电压为Uo,磁芯上的磁能转化为电能,电流is从负极流向正极,开始向次 级侧电池供电。Vp和Vs上施加的是两个互补PWM,肖特基二极管VDs和VDp并联在MOS管两端,起续流保护作用。能量从电池组(B1~Bn)流向单体电池 Bi的过程与上述类似。
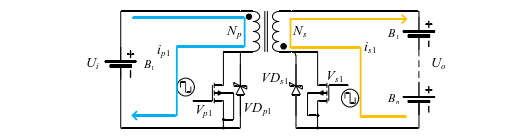
图为单体电池B1到电池组B1~Bn的能量流动,通过这种循环,可以将单独的电池转化为整个 电池组的能量。
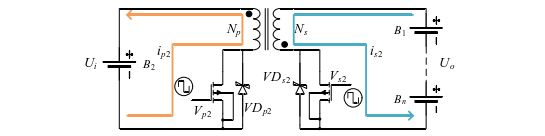
图为电池组B1-Bn到单体电池B2的能量流动。通过这个循环,可以将能量从次级侧转 移到单体电池上。
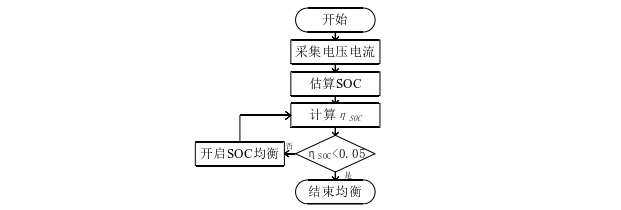
SOC均衡控制
首先采集电池的电流电压,然后估算电池SOC,计算电池SOC标准差,不 满足条件开始均衡,满足条件结束均衡。
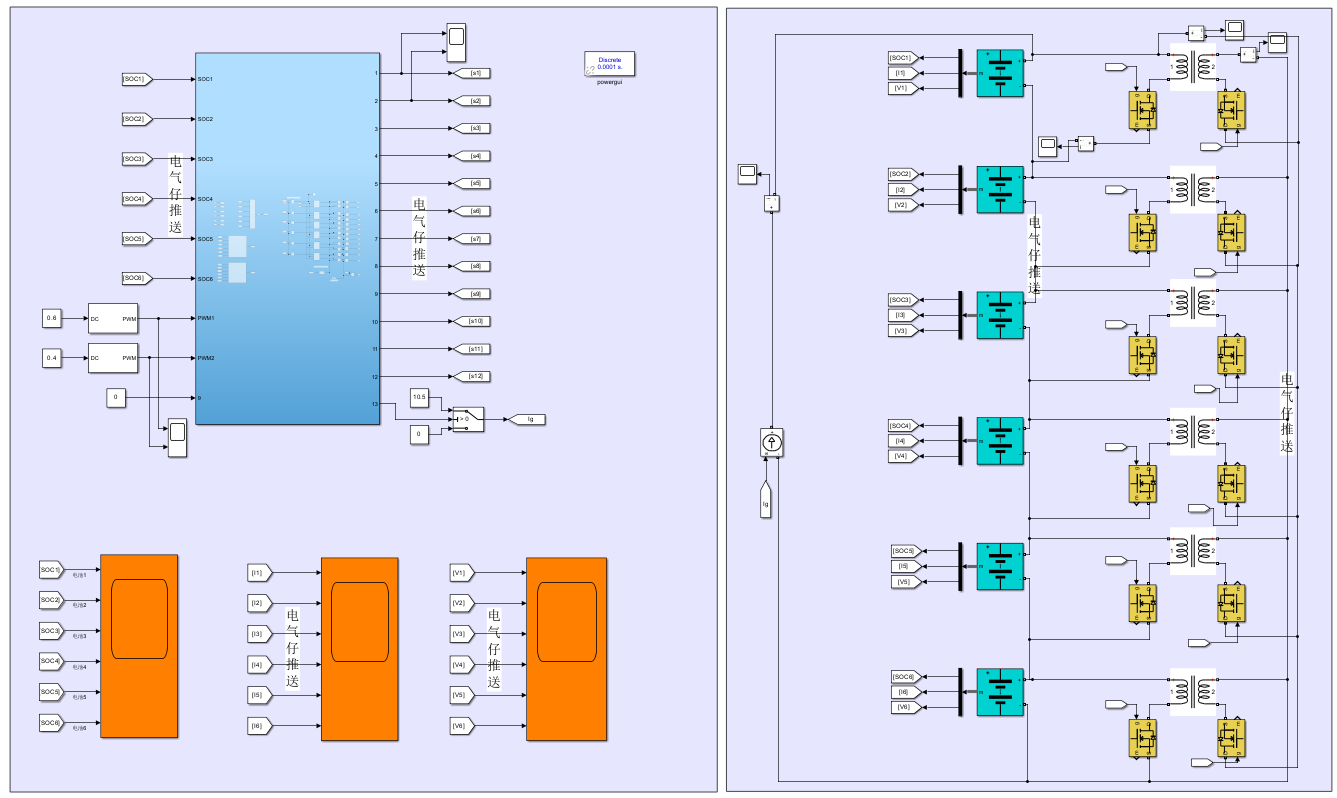
仿真模型主体
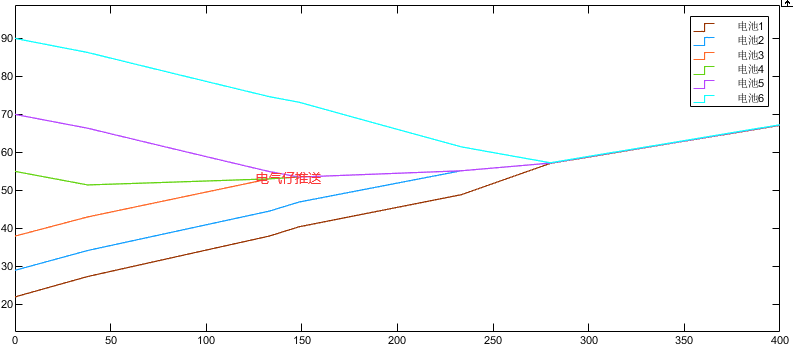
静置条件下的SOC均衡

由图可见,在静置条件下,电池组可以通过SOC均衡策略平均分配各电池的电量(SOC)。
充电条件下的SOC均衡
由图可见,在充电条件下,电池组会先均衡电量,然后均匀充电。
参考文献
锂离子电池SOC估算与主动均衡策略研究_王昊
这篇关于电动汽车退役锂电池SOC主动均衡控制MATLAB仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




