本文主要是介绍BLDC的机械角度、电角度与换相时间,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
6步换相梯形控制,6步一个周期定义为电角度360°
总电角度 = 极对数 * 机械角度
机械角度是指360°,一个圆周角;
电角度度指转子转动的角度,从一个N极到下一个N极是360°。从N极只到 S极,则转子只运行了180°。由于一个电机中通常有多对极对数,所以电角度通常是不跟机械角度重合的。
电角度和机械角度的关系:总电角度 = 极对数 * 机械角度
极对数:三相交流电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极(线圈)个数就是极数。
一台电动机的转子转动一圈有多少电角度,视磁钢对数而定,只有一对磁钢的,电角度和自然角度一致,有两对磁钢的,为2X360°,5对磁钢的,为5X360°,依此类推。
N:槽数,P:极数.
模型用外转子电机都是分数槽电机,其结构特点和性能如下:
1、N必须是3的倍数,P必须是偶数(磁钢必须是成对的,所以必须是偶数)。
2、P数越小,最高转速越高。例如12N10P的最高转速肯定低于12N16P,反之亦然。
3、N比P大,则相对转速更高。9N6P最高转速肯定高于9N12P,反之亦然。
4、同样的N,P越大扭力越强。扭力,12N16P大于12N14P大于12N10P。
5、N和P之间不能整除,比如12N6P。
原文链接:https://blog.csdn.net/corlin6688/article/details/133702027
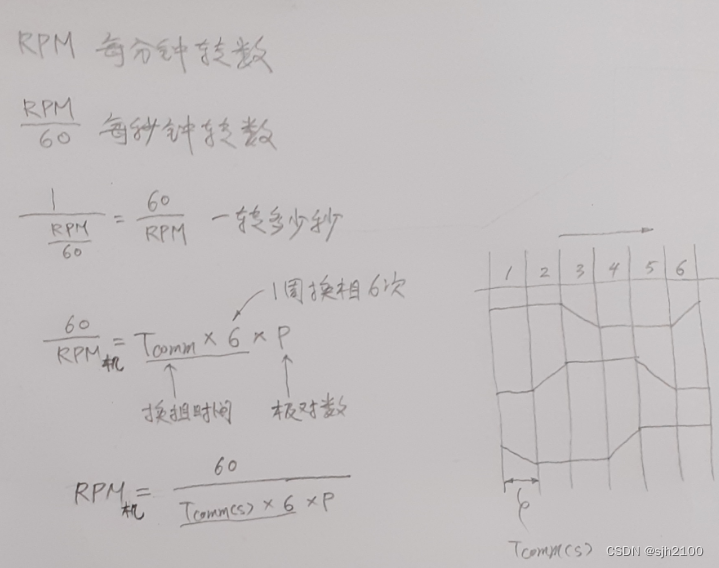
n=rpm,每分钟多少转
n/60,每秒多少转
60/n,一转多少秒
60/n=p/2*6*comm_t
感谢海绵宝宝的指点。
已电机12n14p为例,假设期望转速为400转/分钟,p=14,则comm_t=60/n*2/p/6=0.00357秒。
即3.57毫秒换相一次。按照消磁后的30°电角度,则30°=0.3ms=300us。
如果是10000转/分钟,则comm_t=60/n*2/p/6=1.43e-4秒=0.143毫秒=143微妙,此时30°=11.4us。
假设pwm频率为16.8kHz,则143us需要计数8.5产生定时器溢出。如果是中心计数模式,则需要ARR=4。这下30°的电角度需要0.2的计数,此时16.8kHz就来不及了。
这篇关于BLDC的机械角度、电角度与换相时间的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




