本文主要是介绍【电控笔记6】电流回路+延迟效应,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
问题提出
数字控制系统的delay:
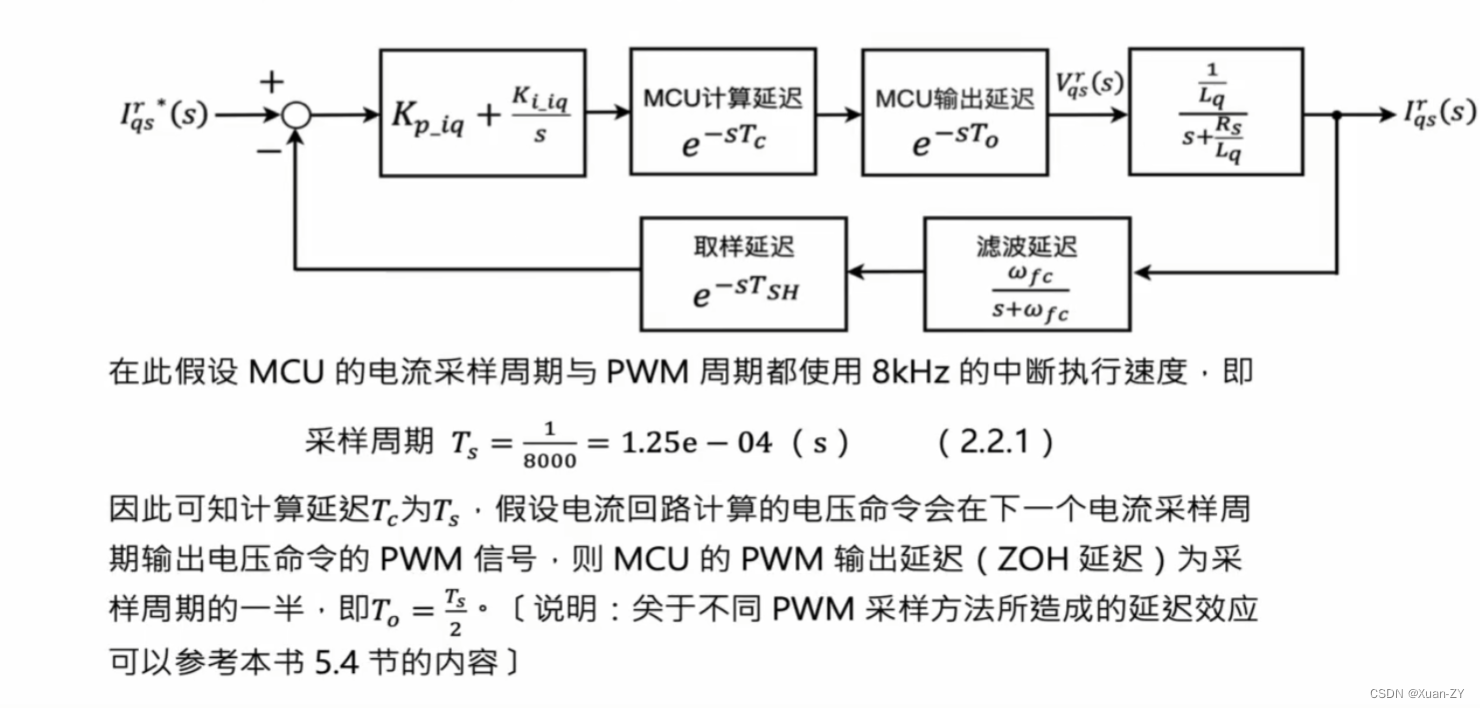
5.4节有介绍T0=0.5TS
低通滤波器的时间常数?

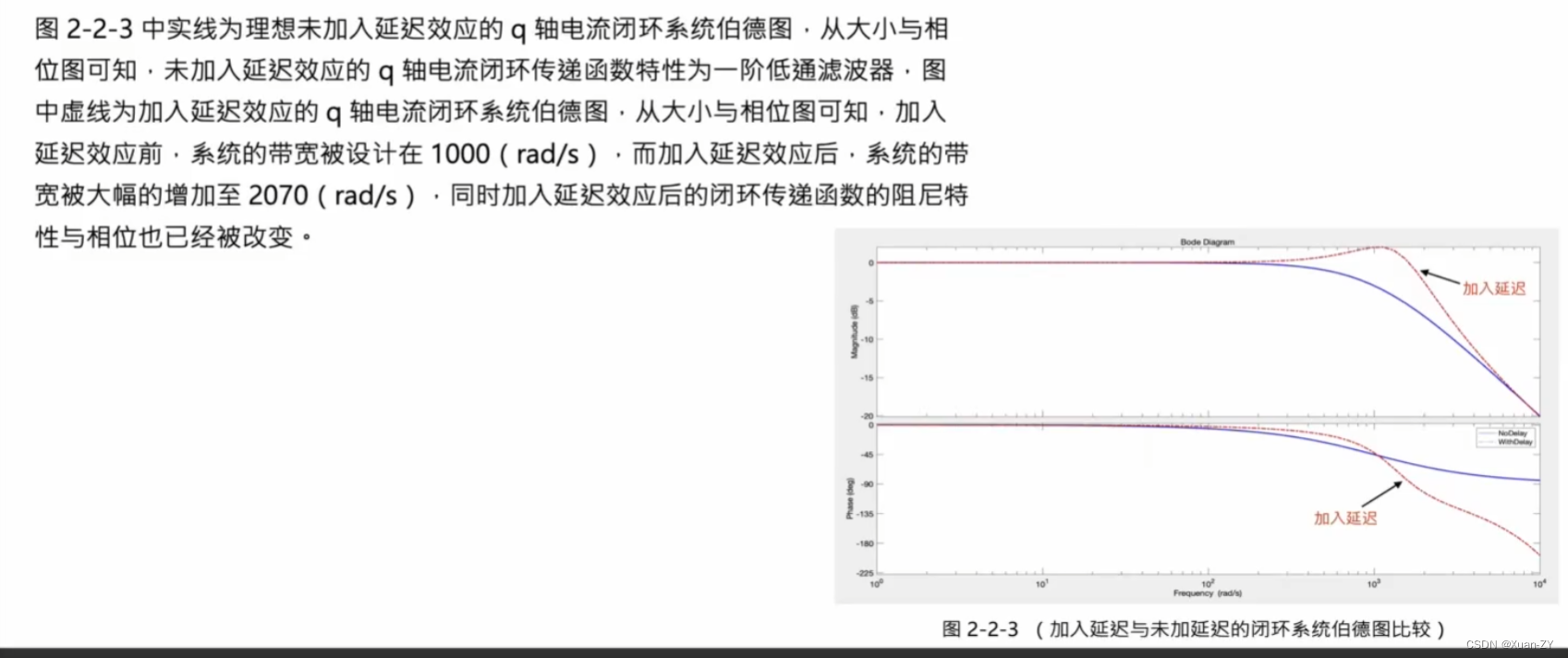
可用示例程序 m2 2 1b 如下图画出开环系统的伯德图进行比较,如图 2-2-4 所示,由于延迟组件会侵蚀系统的相位,因此从图可以看出,加入延迟效应后,q轴电流回路的相位裕度(Phase Margin) 从原来的 90 度变成 52.5 度,相位裕度是控制系统的 稳定度指标,而随着操作频率的增加,相位延迟会随之增大,图2-2-5 显示加入延迟后的系统步阶响应波形,并与未加入延迟的响应进行比较,可以发现加入延迟效应后ÿ
这篇关于【电控笔记6】电流回路+延迟效应的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






