本文主要是介绍长基线大高差RTK定位效果分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
为了评估基于GNSS参考站网的实时高精度滑坡监测算法效果,如图2所示,本文共收集了中国西北2019年年积日第271~277共7天的4个CORS站数据,分别为LZLC、BYBY、LXDX、LXJS, 2个黑方台滑坡监测站数据HF01和HF06,其中HF01作为黑方台滑坡监测基准站,HF06作为流动站,其中4个CORS站(红色三角形),用于提取大气延迟信息并建模,另外2个滑坡监测站(蓝色圆形)用于测试滑坡监测算法的终端定位效果。根据Delaunay三角形构网规则,4个CORS站共形成5条基线,平均站间距为105.4km。表1给出了所形成的5条基线长度与高差,其中最长基线128.7km,最大高差609.0m。CORS站所有的接收机型号均为TRIMBLE NETR9,版本号为4.85,天线型号为TRM59900.00,接收机同时支持GPS/BDS系统双频数据,数据采样率为15 s,数据采集时段接收机仅能获取北斗二号(BDS-2)观测数据,滑坡监测站所用接收机型号是芯星通高精度UB380,天线类型为HG-GOYH7151,数据采样率为1s,接收机可接收四系统观测数据。
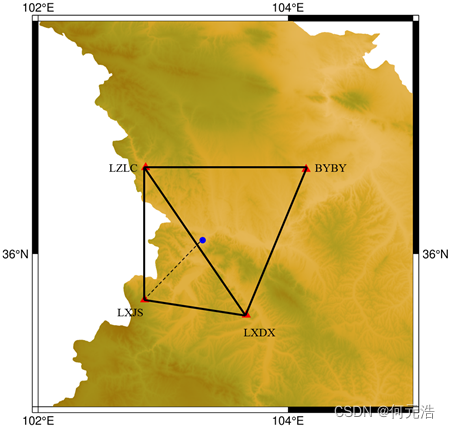
实验基准站分布
表1 CORS站间基线长度与高差
| 基线 | 间距/km | 高差/m |
| LZLC-LXJS | 95.2 | -439.3 |
| LXJS-LXDX | 74.5 | -3.4 |
| LXDX-LZLC | 128.7 | 442.6 |
| LXDX-BYBY | 113.6 | 609.0 |
| BYBY-LZLC | 115.1 | -166.4 |
2019年年积日第271天,HF06流动站基于虚拟基准站观测值和虚拟大气观测值约束两种服务模式下的定位误差结果,仅给出了模糊度固定解的定位结果。从图7中可以看出,VAC模式下的定位误差整体小于虚拟基准站模式;VAC模式下水平和高程方向的误差基本在3 cm以内,而虚拟基准站模式下有较多历元水平方向的误差超过了5 cm;1 d内VAC模式下水平和高程方向的均方根误差分别为0.96cm和2.5cm,虚拟基准站模式下水平和高程方向的RMS分别达2.3cm和4.3cm。
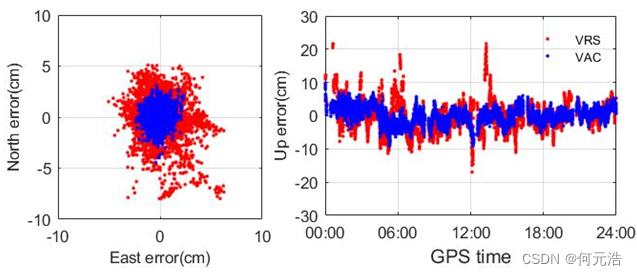
HF06流动站两种模式下的RTK固定解坐标误差结果
这篇关于长基线大高差RTK定位效果分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






