rtk专题

组合导航、卫星定位与RTK、石英表计时
导航是现代生活必不可少的基础设施,大到俄乌冲突导弹互相暴揍,小到出门游玩,都离不开导航功能。我们常说导航,但是导航这一功能的核心是定位。沿着定位这条线我们开始本篇文章的内容。 卫星定位的原理 全球卫星定位系统的英文是Global Navigation Satellite System(GNSS),GNSS主要由空间卫星、地面监控系统、用户接收机三部分组成。空间卫星按照一定的频率昼夜不停的通过高
无人机RTK定位定向技术详解
无人机RTK(Real-Time Kinematic,实时动态差分技术)定位定向技术,是无人机领域的一项高精度导航与定位技术。它结合了全球导航卫星系统(如GPS、GLONASS、Galileo、BDS等)与实时差分技术,通过地面基准站与无人机上流动站之间的数据实时传输与处理,实现厘米级甚至毫米级的定位精度。这一技术极大地提升了无人机在复杂环境中的作业能力,广泛应用于测绘、农业、环境监测、电力巡检、

【通信协议-RTCM】GPS-RTK可观测消息 ---- 对应RTCM十六进制 编码ID(3E9 3EA 3EB 3EC)
1. 消息头的内容,类型1001、1002、1003、1004:GPS RTK消息 DATA FIELDDF NUMBERDATA TYPENO. OF BITS Message Number(e.g.,“1001”= 0011 1110 1001) - 消息编号 DF002 uint12 12 Reference Station ID - 参考值ID DF003 uint12 1

北斗RTK+UWB定位的优势
在当今科技飞速发展的时代,定位技术的应用已渗透到我们生活的方方面面。从导航、物流到无人驾驶、智能制造,精准定位技术无处不在。而北斗RTK(Real-Time Kinematic,实时动态)和UWB(Ultra-Wideband,超宽带)这两项先进技术的结合,正成为行业新宠,展现出无与伦比的优势。 一、双剑合璧,精度无敌 首先,北斗RTK技术以其厘米级的定位精度而著称。RTK通过在已知位置

北斗导航 | 多GNSS系统PPP-RTK原型系统及性能分析(2020 CPGPS全球华人导航定位协会年会)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 参考文献及代码下载:GPS北斗双模原理代码及书籍 博主是做视觉Vision出生——“视觉里程计,视觉SLAM”,后来找工作也是一不小心步入了卫星导航的大门,也是灰常荣幸。现在主要研究RDSS、RAIM及软件PVT导航解算。欢迎一起

北斗导航 | 北斗/GNSS精密定位:从PPP-RTK 到 Vision-PPP(第十一届中国卫星导航年会报告)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 参考文献及代码下载:GPS北斗双模原理代码及书籍 博主是做视觉Vision出生——“视觉里程计,视觉SLAM”,后来找工作也是一不小心步入了卫星导航的大门,也是灰常荣幸。现在主要研究RDSS、RAIM及软件PVT导航解算。欢迎一起

北斗导航 | 卫星导航在动态监测中的应用(RTK)
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ 全球定位系统(GPS)作为20世
室内也可以用北斗定位?还能用RTK?
室内卫星顾名思义,就是在室内有遮挡环境中的卫星定位技术,众所周知,目前全球几大GNSS定位系统已经很完善,但是GNSS有个致命的弱点,就是地面如果有遮挡就没有信号,在这样的条件下,在室内定位场景中的卫星定位技术(也叫伪卫星)就应运而生。 在国内市场,GNSS定位系统是北斗,所以,国内室内卫星技术也主要是基于北斗技术,所以国内的室内卫星通常也叫“室内北斗”。 大致原理是在室内场景模拟真实导航卫星

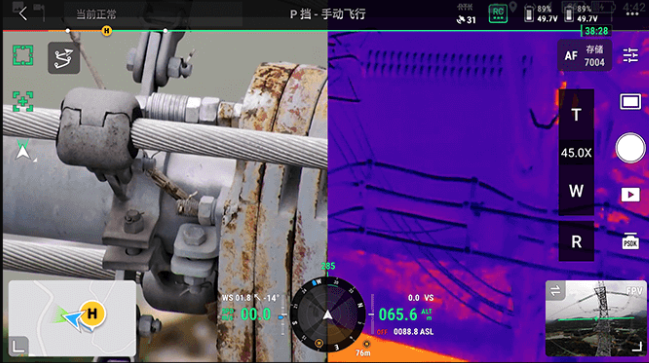
RTK负载(4K可见光+高分热成像+超广角+激光测距)四光AI智能识别跟踪吊舱技术详解
无人机+光电吊舱的RTK负载(4K可见光+高分热成像+超广角+激光测距)AI智能识别跟踪吊舱技术是一种高度集成和先进的无人机观测系统。系统结合了无人机的飞行能力和光电吊舱的多功能传感器,通过集成RTK(实时动态差分定位)技术、4K可见光摄像头、高分热成像仪、超广角镜头和激光测距仪,以及AI智能识别跟踪算法,实现了对地面目标的精准观测、识别、跟踪和测量。 以下是该技术的主要特点和功能详解:
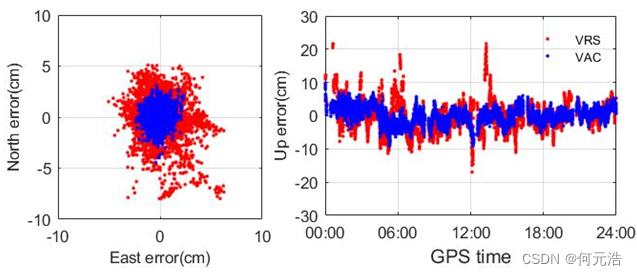
长基线大高差RTK定位效果分析
为了评估基于GNSS参考站网的实时高精度滑坡监测算法效果,如图2所示,本文共收集了中国西北2019年年积日第271~277共7天的4个CORS站数据,分别为LZLC、BYBY、LXDX、LXJS, 2个黑方台滑坡监测站数据HF01和HF06,其中HF01作为黑方台滑坡监测基准站,HF06作为流动站,其中4个CORS站(红色三角形),用于提取大气延迟信息并建模,另外2个滑坡监测站(蓝色圆形)用于测试

自动驾驶传感器:带你搞懂卫星导航GPS-RTK原理
自动驾驶传感器:带你搞懂卫星导航GPS-RTK原理 附赠自动驾驶学习资料和量产经验:链接 0. 前言 自动驾驶的感知层里面,前面Lidar,Radar,Camera的介绍之前已写完。还差GNSS-RTK和IMU模块就补齐了主要的自动驾驶感知层的硬件,而通常这俩模块会被集成到一起形成所谓**“组合导航”。** 对于自动驾驶定位而言,Lidar,camera等传感器输出的数据都需要用户使用SL

北斗导航 | 3D LiDAR辅助GNSS NLOS缓解用于城市峡谷中可靠的GNSS-RTK定位
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 3D LiDAR
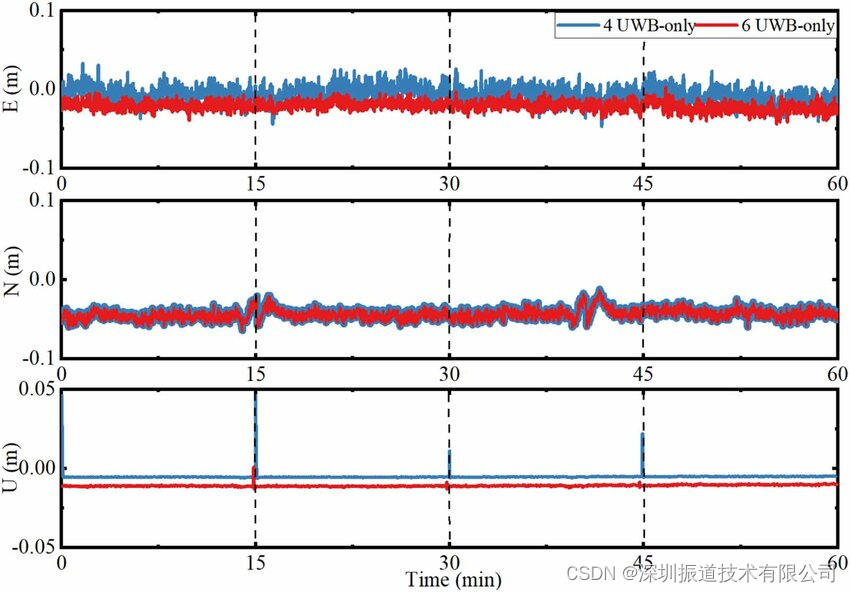
UWB辅助RTK如何应对极端环境
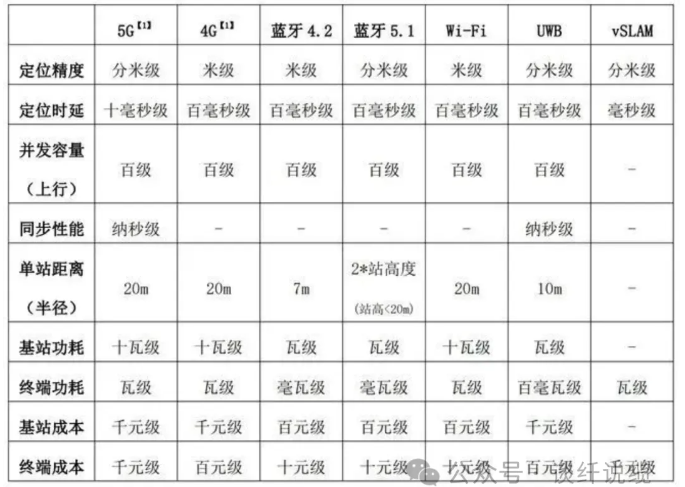
1.UWB定位 - UWB(Ultra-Wideband)是一种无线通信技术,其特点是具有较宽的频带,可以提供0.1-0.5m高精度的距离测量。 - UWB定位需要四台基站(每台基站视距间隔50-100米)呈矩形安装部署,以实现高精度二维定位。 2. RTK差分定位 -实时动态(RTK)定位是现代工业中常用的技术,但受到信号遮挡、衰减和多径等问题的限制,尤其是在复杂的城市峡谷中
Ubuntu18.04 下Ublox F9P 实现RTK (利用CORS服务无需自建基站)
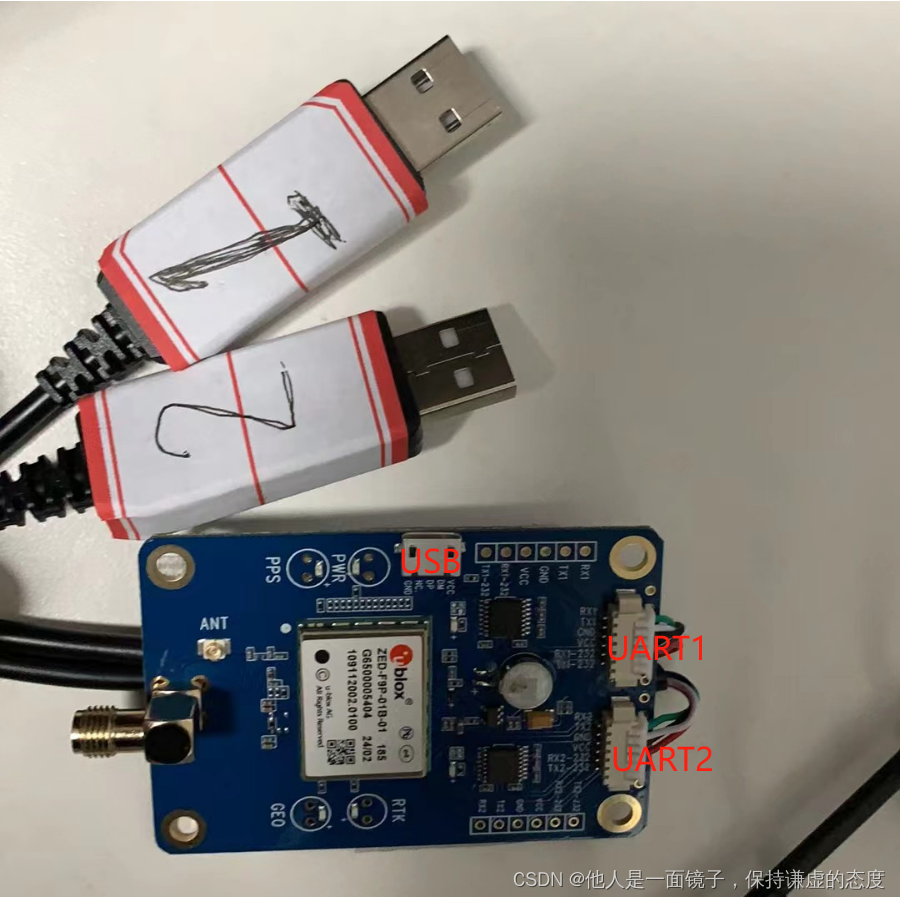
本内容参考如下连接:Ubuntu下Ublox F9P利用CORS服务无需自建基站实现RTK-CSDN博客 一、Ublox F9P 硬件模块示意图 图中展示了Ublox F9P的接口,包括串口×2(`UART1`和`UART2`),USB×1。需要人为通过u-center(Ublox F9P的显示软件)软件设置以下功能: Ublox通过`UART1`向PC端发送的`UBX-NAV-PVT`
无人机精准定位技术,GPS差分技术基础,RTK原理技术详解
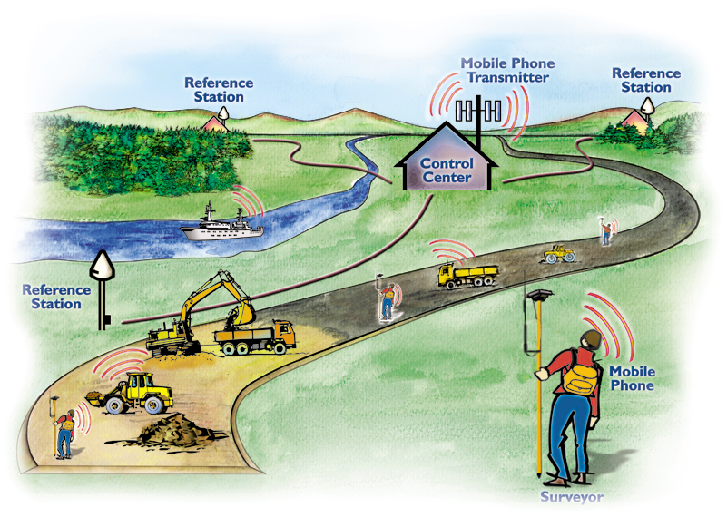
差分GPS的基本原理 差分GPS(Differential GPS,简称DGPS)的基本原理是利用一个或多个已知精确坐标的基准站,与用户(移动站)同时接收相同的GPS卫星信号。由于GPS定位时会受到诸如卫星星历误差、卫星钟差、大气延迟、多径效应等多种因素的影响,导致单点定位精度受限。 以上各类误差中除多路径效应均具有较强的空间相关性,从而定位结果也有一定的空间相关性。利用基准站(设在坐
杂项:rtk原理简要说明
目录 🍅点击这里查看所有博文 随着自己工作的进行,接触到的技术栈也越来越多。给我一个很直观的感受就是,某一项技术/经验在刚开始接触的时候都记得很清楚。往往过了几个月都会忘记的差不多了,只有经常会用到的东西才有可能真正记下来。存在很多在特殊情况下有一点用处的技巧,用的不多的技巧可能一个星期就忘了。 想了很久想通过一些手段把这些事情记录下来。也尝试过在书上记笔记,这也只是一时的,书不在
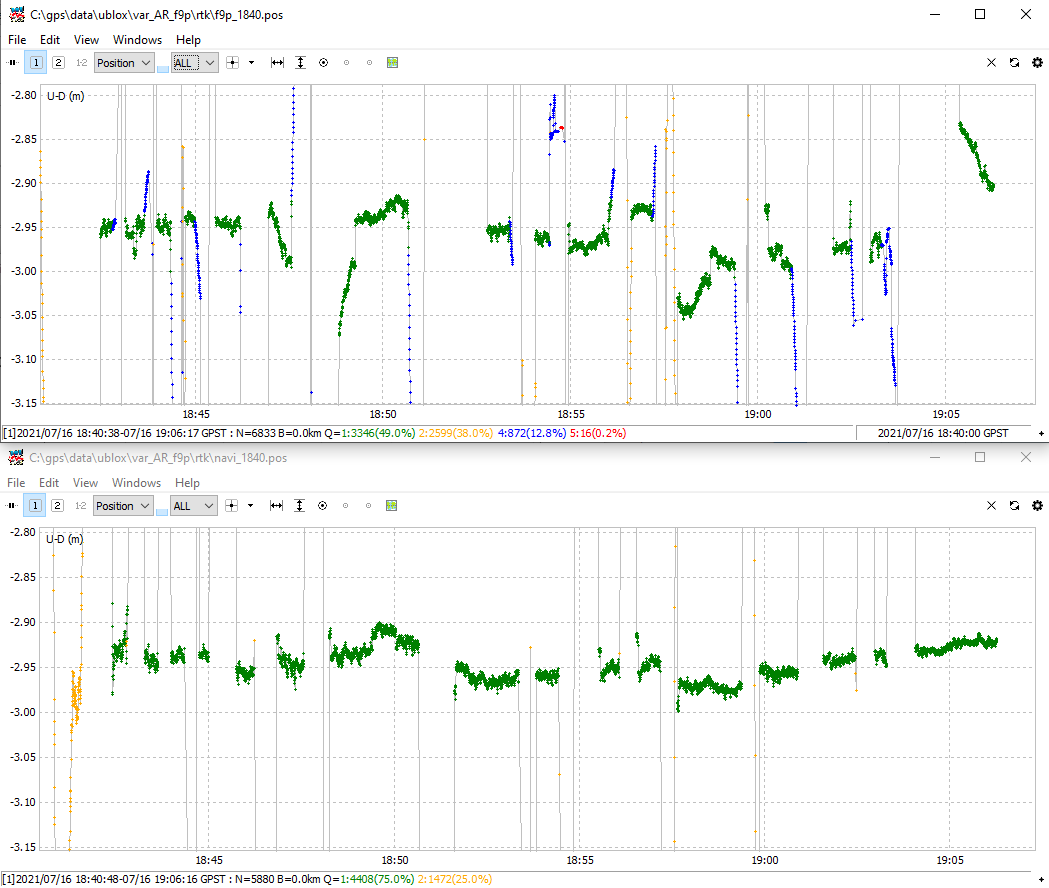
【翻译】20210723 U-blox F9P 的 RTK 解比较
原文地址为https://rtklibexplorer.wordpress.com/2021/07/23/comparing-rtk-solutions-for-the-u-blox-f9p/,这里仅作翻译记录使用,更精确的理解请查看原文 The u-blox F9P internal RTK solution engine is very good and I have been recomm
GICI-rtk/imu/camera紧组合代码学习
gici-open 项目地址: https://github.com/chichengcn/gici-open 前言 在multisensor_estimating.cpp 文件中的processEstimator()函数 正式开启多传感器Estimating线程的后端估计部分。本文主要介绍rtk/ins/camera紧组合的后端优化部分。在后端估计部分涉及大量的GNSS相关算法(如双差计算
视觉增强RTK论文(1)—— GNSS-Stereo-Inertial SLAM for Arable Farming
文章目录 摘要方法标记ORB-SLAM3GNSS-Stereo-Inertial融合 实验结果代码 摘要 农业任务自动化速度的加快要求现场机器人采用高精度和鲁棒的定位系统。同时定位和映射(SLAM)方法不可避免地会在探索性轨迹上积累漂移,并且主要依赖于位置重新访问和循环闭合来保持一个有界的全局定位误差。环状闭合技术在农田中具有显著的挑战性,因为不同视野的局部视觉外观非常相似,并且

第三讲GNSS相关时间系统和转换 第四讲观测值的产生和分类 | GNSS(RTK)课程学习笔记day2
说明:以下笔记来自计算机视觉life吴桐老师课程:从零掌握GNSS、RTK定位[链接],从零掌握RTKLIB[链接]。非原创!且笔记仅供自身与大家学习使用,无利益目的。 第三讲 GNSS相关时间系统和转换 GPS卫星的位置在时间过程中是变化的,因此在给定GPS卫星的位置坐标时,必须给出相应的瞬时时刻。GPS定位是通过GPS接收机测量和处理GPS卫星发射的信号,来确定观测站(即GPS接收机)

UWB+RTK高精度室内外融合定位终端精度测试报告
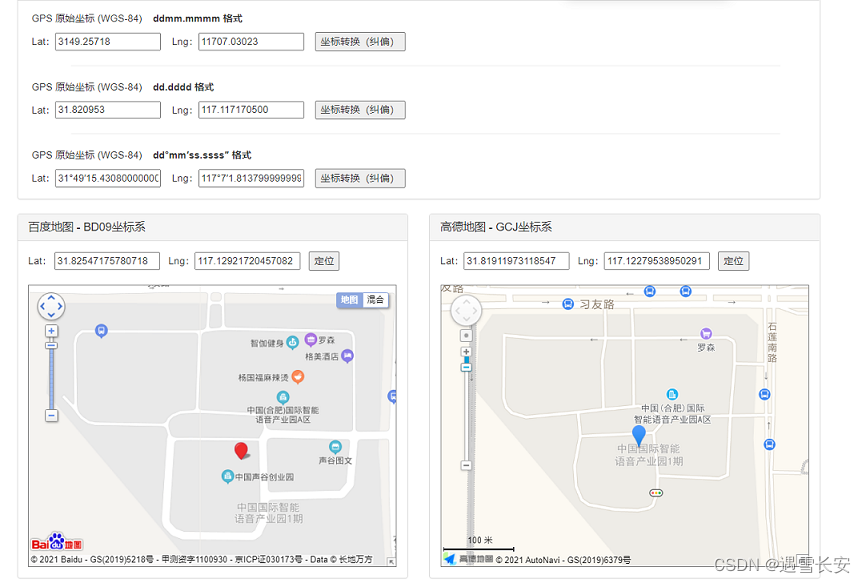
首先我们将融合定位终端URT放在卷尺起点0米处,获取此时终端获取到的经纬度坐标如下图所示。 起点获取到的经纬度坐标为: $GNGGA,081824.00,3951.80418,N,11615.39064,E,4,12,0.75,52.0,M,-8.9,M,1.0,1937*48,3473,12 纬度:3951.80418 经度:11615.39064 将融合定位终端URT放在卷尺3

Redux Toolkit(RTK)在React tsx中的使用
一个需求: header组建中有一个搜索框,然后这个搜索框在其他页面路由上都可以使用:例如这两个图共用顶部的搜索框; 我之前的做法就是组建传值, 在他们header 组建和 PageA ,B 的父级组件上定一个值,然后顶部变化传到父级组件,在从父级组件传到page组件,有点繁琐,现在说一下利用redux解决这个问题: 其实就是在同一个窗口内的组件共享一个store值, store的至一旦发生
基于飞迪RTK/INS组合导航模组的里程计发布方法
文章目录 概要解算过程获取初始化点经纬度坐标系转UTM计算航向角发布odom坐标 完整代码 概要 这篇博客主要介绍,如何将GPS_fix、磁偏角转成odom信息。 PS:官方的驱动包中是自带odom信息,但是对于原点的定义尚未找到出处,故自己另外写了一套发布odom信息。 解算过程 获取初始化点 第一个获取的GPS_fix点为初始点 initPose.latitude =