本文主要是介绍背景建模--Vibe算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、概述
2009 年,Marc Van Droogenbroeck 等人提出了一种新的背景建模法: Vibe(Visual Background Extractor)算法。Vibe 是一种通用的运动目标检测算法,对于视频流类型、颜色空间、场景内容没有特定要求。首次将随机选择机制引入到背景建模中,通过随机选择样本估计背景模型的方式描述实际场景的随机波动性。通过调节时间二次抽样因子,使极少的样本值就能覆盖所有的背景样本,兼顾了准确率和计算负载。抑噪能力强,噪声等干扰信息在传播之前须与背景模型相匹配,显而易见,无法匹配,从而抑制了干扰信息的传播。Vibe 分为初始化背景模型和更新背景模型两个步骤。
二、算法基本思想
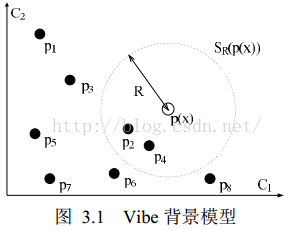
Vibe 的基本思想:为每个像素点建立一个样本背景模型(背景模型中包含N 个样本值),计算待分类像素与背景模型的相似度,如果相似,则分类为背景。其中,相似度根据待分类像素(图 3.1 中的 p(x))与背景模型中所有 N 个样本(图 3.1 中的 p1,……,p8)的欧式距离小于一定阈值(图 3.1 中的 R)的个数(图 3.1 中在球体 SR(p(x))内的样本总数)来决定,若个数大于一个给定的最小阈值 Umin,则为相似,否则为不相似。
为每个像素点建立一个包含 N 个样本值的背景模型,其数学表达式如下:

式中 pi(i=1,2,……,N)表示背景样本集中的第 i 个样本值。为了比较待分类像素与背景模型的相似度,定义一个以 p(x)为中心,R 为半径的球体 SR(p(x)),用U 表示背景模型 M(x)和球体 SR(p(x))的交集,U 表示一个相似度函数,当 U 大于一个给定的阈值 Umin时,待分类像素 p(x)与背景模型相似,分类为背景,其数学表达式如下:

根据上式,计算 p(x)与 N 个背景样本的欧式距离,判断是否小于阈值 R。在实际处理中,一旦找到 Umin个样本匹配时,像素 p(x)分类为背景,停止计算,从而提高运算效率。
Vibe 背景模型的准确度只取决于球体半径 R 和最小阈值 Umin。实验表明,R=20,Umin=2,效果最佳。通常,无需调整每个模型的 N、R、Umin值。其中,N 和 Umin的比率确定了背景模型的敏感度。

三、背景模型初始化
最常用的初始化背景模型的方法是统计连续帧的样本信息估计背景模型的临时分布,但是,通常我们希望在短时间内就能完成前景分割,于是,Vibe 采用单帧初始化背景模型,根据相邻像素具有相似临时分布的假设,可采用像素空间邻域分布信息构建背景模型,即随机选取邻域值初始化背景模型。邻域窗口的选择需满足两个条件:(1)包含充分的样本, (2)符合距离和相关性成反比的统计理论。这种初始化方式能快速建立背景模型。
Vibe 从视频图像序列的第一帧中随机选择像素空间领域的 N 个像素值作为初始样本,初始化 Vibe 背景模型。实验结果表明,分辨率为 640×480 的图像,8 领域最佳。假设 t=0 表示第一帧,NG(x)表示像素 x 的空间领域

M0(x)表示像素 x 的初始模型, 包含了 N 个来自空间领域 NG(x)的样本集合。实验证明,这种单帧初始化方式是有效的,唯一的缺陷是可能会引进鬼影。
四、背景模型更新策略
背景模型的更新是运动目标检测算法的关键,Vibe 的更新策略包括三个部分:(1)无记忆的更新策略,保证背景模型中样本生命周期的平滑衰减;(2)随机二次抽样,可人为延伸背景模型覆盖的时间窗口; (3)领域传播更新机制,保证空间一致性,恢复被覆盖背景。
Vibe 的更新策略是一种只有背景参与更新的保守策略。理论上,背景模型中每个样本的最佳衰减方式是单调衰减。据此,Vibe 采用一种指数单调衰减的方式保证样本的生命周期呈单调衰减,并非传统的先进先出替换策略,每个样本被选中的概率是相等的。同时,Vibe 背景模型的更新也是一个随机选择过程,随机选择背景模型中的一个样本替换为新值,如图 3.2 所示。
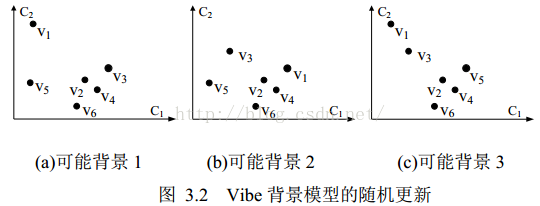
如图 3.2 所示,图(a)、(b)、(c)分别表示背景模型中的样本 v3、v1、v5 被替换为新值的 3 种可能新背景模型,因此,Vibe 背景更新是个随机过程。根据该更新策略,一个样本在时间 t 和 t+dt 之间存在的概率是(N-1/N)dt,其数学表达式如下:

式 3-5 表示背景模型中样本的生命周期呈指数衰减, 样本在时间(t,t+dt)内被保留下来的概率与时间 t 无关,完全可人为决定一个样本存在于背景模型中的时间。Vibe 采用二次随机抽样来实现用有限样本表征无限时间窗口的可能。基本思想:减少背景更新频率,人为延伸背景模型中样本的寿命。用φ来表示时间二次抽样因子,通过调节φ来调整像素背景模型覆盖的时间窗口长度。根据邻域像素具有相似临时分布的原理,Vibe 在邻域内传播背景样本。这种邻域传播机制保证了算法的空间一致性,且能有效恢复出被前景覆盖的背景区域。
这篇关于背景建模--Vibe算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









