本文主要是介绍用于HUD平视显示器的控制芯片:S2D13V40,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一款利用汽车抬头显示技术用于HUD平视显示器的控制芯片:S2D13V40。HUD的全称是Head Up Display,即平视显示器,以前应用于军用飞机上,旨在降低飞行员需要低头查看仪表的频率。起初,HUD通过光学原理,将驾驶相关的信息投射在飞行员的头盔上,使得飞行员能在保证正常驾驶的同时,关注到飞行的各项指标并接收地面传输的信息,提升驾驶的安全性和便捷性。为了提高安全性,并减轻驾驶者的疲劳,车辆制造商越来越多地安装平视显示器。该显示器可让驾驶者目光移动较小的距离来看到车辆的状态信息。尽管预计需求会增长,但制造商仍面临系统成本和开发时间等问颖。爱普生的新型抬头显示控制器S2D13V40无需外部存储器,就能够根据车辆挡风玻璃的曲率,校正从SoC传输图像的失真,从而能够快速实现平视显示系统。S2D13V40具有显示安全功能,并支持构建更可靠的显示系统。该控制器IC满足汽车行业的严格质量要求。它符合AEC-Q100 ,可在高达105'C的温度下运行。下面就给大家简单介绍下抬头显示控制器S2D13V40的规格参数,以供大家参考:
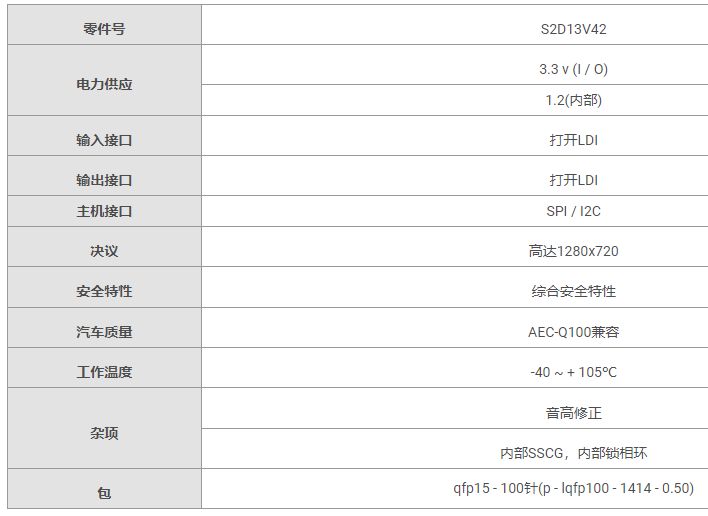
S2D13V42是一款专门用于平视显示器的翘曲校正控制器IC。它支持高分辨率(高达1280 x 720),并具有内部表面校正引擎,可修复由非线性显示表面引起的视觉扭曲。它还能够同时执行其他图像操作,如旋转和缩放,并具有音高校正功能。S2D13V42符合汽车设计要求,包括符合AEC-Q100/IATF16949标准和全面的安全功能。S2D13V42可以很容易地插入到现有的系统显示架构中,只需进行最小的修改,使其成为现有和未来设计的理想解决方案。
爱普生还寻求利用其设备技术来实现智能社会。为此,EPSON公司后续将陆续推出各种用于车辆显示系统的控制器和驱动器,这些控制器和驱动器将具备高分辨率和安全功能,以提高用户产品的性能。
这篇关于用于HUD平视显示器的控制芯片:S2D13V40的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




