本文主要是介绍动物养殖虚拟仿真之生猪屠宰VR教学系统,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
生猪屠宰是一个复杂而危险的工作,需要有严格的操作规程和丰富的经验。但是传统的生猪屠宰培训存在一些问题,例如成本高、难以模拟真实场景等。
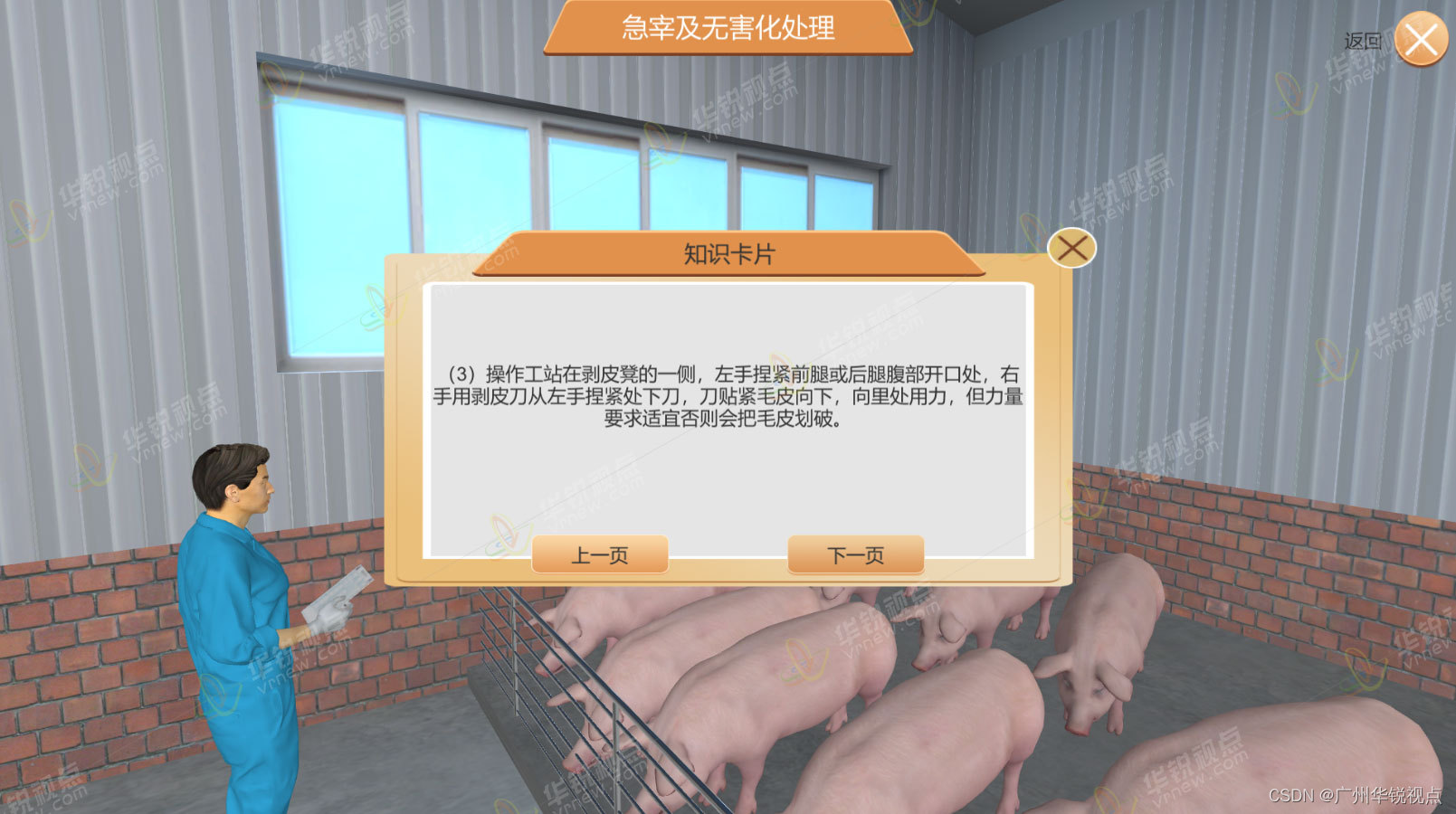
为了解决这些问题,VR技术被应用到生猪屠宰培训中,广州华锐互动由此开发了生猪屠宰VR教学系统,包括:检疫处理流程、健康猪屠宰流程、检疫流程总结、屠宰场布置图等虚拟仿真内容。
其优势主要体现在以下几个方面:
安全性高:VR技术可以在虚拟现实环境中进行生猪屠宰实操模拟,避免了实操操作中对猪只和操作人员的伤害风险,保障了学员和实验动物的安全。
模拟真实场景:VR技术可以根据实际生猪屠宰场景进行建模,模拟真实的操作场景。学员可以在虚拟环境中进行真实的操作练习,更加贴近实际工作,从而提高培训效果。
可重复性强:通过VR技术,学员可以在虚拟环境中进行多次操作,不受时间和空间的限制。这样可以大大提高学员的操作经验和技能水平。
节省成本:通过采用VR技术进行生猪屠宰培训,可以大大降低成本,减少实验动物和设备的消耗,提高培训效率。
交互性强:VR技术可以通过交互式场景和操作,增加学习的互动性。学员可以与虚拟环境中的猪只进行互动,全面掌握操作技巧和细节。
总之,VR技术在生猪屠宰培训中发挥的优势,可以有效地提高学员的操作经验和技能水平,为生猪屠宰行业的发展和提升做出重要贡献。
广州华锐互动正在积极开展动物畜牧学科专业的虚拟仿真教学课件的改进和建设,并取得了一定的成效,已完成鸡、猪、牛、马、鱼等动物养殖的虚拟仿真实验课件制作。通过制作畜牧VR教学课件,以多种数字化教学方式,搭建适合现代动物学教育的数字化教学平台。
这篇关于动物养殖虚拟仿真之生猪屠宰VR教学系统的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







