本文主要是介绍双目立体感知市场启动?小众路线背后的生存难题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
立体感知技术在汽车赛道的突围,正在进行中。
高工智能汽车研究院监测数据显示,2021年中国市场(不含进出口)乘用车前装标配搭载双目立体感知方案上险量为22.39万辆,同比仅增长13.54%,属于辅助驾驶方案的小众路线。Veoneer、大陆集团、博世仍是主要的方案供应商。
随着今年极狐阿尔法S 华为HI版开始交付,以及后续大疆五菱定制车型(均搭载双目立体感知方案),市场似乎开始进入活跃期。按照大疆车载的说法,双目立体感知传感器不仅能准确识别常见物体,还能精准定位任意障碍物并估算其距离。
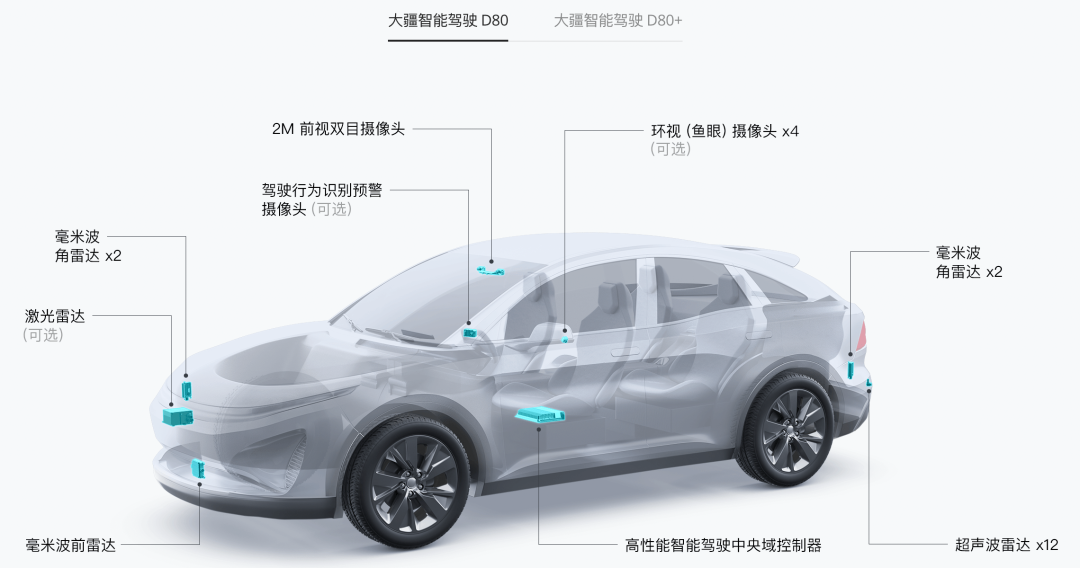
同时,新的技术升级也在推动立体感知技术的可靠性提升。比如,大疆车载双目立体视觉感知系统采用在线自标定技术,能有效避免因温变、振动等环境因素而引起的基线变化所导致的感知性能下降,让产品更稳定可靠。
众所周知,立体视觉深度估计与视觉感知技术,除了能精确识别并定位动、静态目标与道路元素,还能获得任意障碍物的关键点云深度信息,有效降低漏检率。同时,比纯机器学习算法方案更强大的泛化能力,能实现更明确的几何分割及更精确的深度估计。
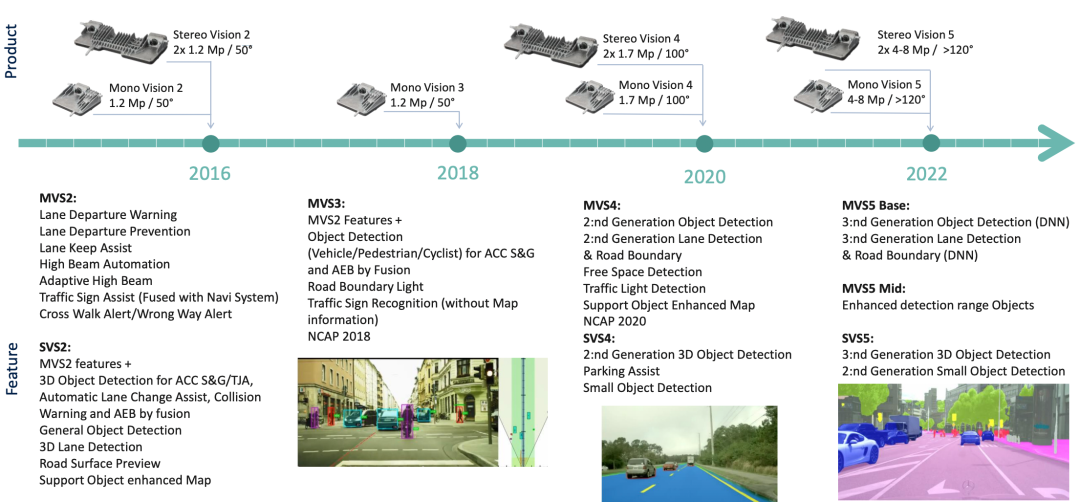
在摄像头方面,以Veoneer的产品线为例,2016年开始量产第二代双目立体感知方案,1.2MP、50°视场角;2020年开始量产第四代产品,1.7MP,100°视场角;预计今年开始推出第五代产品,4-8MP,大于120°视场角。
从目前市场的整体情况来看,2MP双目立体感知将主要用于低阶智能驾驶,8MP将主要用于高阶智能驾驶。同时,市场还在演化出一些新的技术路线,比如双目立体感知基础上的AI深度学习,增加红外感知能力等等。
前装热度持续
对于双目立体感知来说,最具里程碑意义的车型,就是梅赛德斯-奔驰S级轿车首发量产的L3级自动驾驶解决方案,基于Veoneer的第四代SVS双目立体感知方案和毫米波雷达组成的DRIVE PILOT系统。
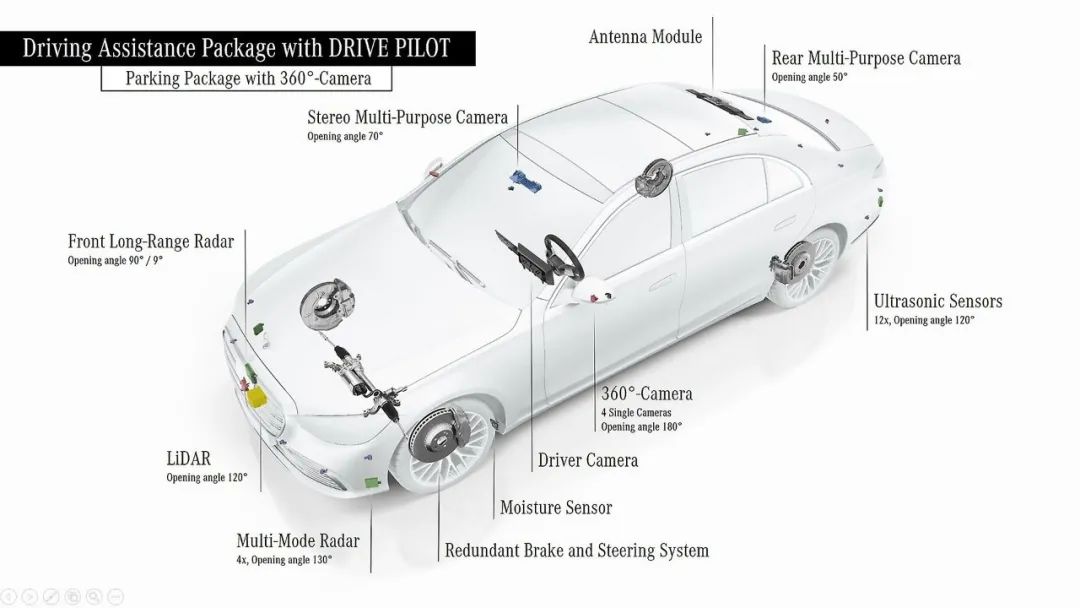
这套方案首次将卷积神经网络(CNN)技术与三维立体技术相结合,实现对车前物体的精确分类和定位。双目立体感知的功能包括车道检测、可行驶区域、小障碍物检测和三维物体分类。此外,还辅助检测部分特殊车辆,以支持L3级要求。
在此之前,Veoneer的上一代双目方案已经在奔驰多款车型量产,同时,这套DRIVE PILOT系统也将在奔驰后续的多款车型搭载。从单一品牌来说,奔驰也是全球双目立体感知方案的主要客户之一。
不过,满足高阶智能驾驶要求的方案,门槛极高。比如,早期双目方案主要供应商博世、大陆,以及此前传出为博世开发双目方案的LG,最终都没有拿到定点。这一点,也可以从斯巴鲁供应商的变更,可见一斑。
2020年上市的全新一代斯巴鲁(第四代)EyeSight,除了更换了供应商(从日立变更为Veoneer),整体性能也进行了进一步的迭代升级。此前,在日本NCAP (JNCAP)中拿到了最佳成绩,超过了10辆获得五星评级的竞争车型,以最高分获得最佳五星奖。
首先,立体摄像头单元体积进一步变小。同时,增加了4个角毫米波雷达融合感知能力,满足未来几年即将推出的Euro-NCAP和JNCAP的评估要求。此外,还在双目感知的基础上增加了更多的深度学习能力。
同时,摄像头的CMOS供应商仍然是斯巴鲁一直合作的安森美半导体,像素也从1.2M增加到2.3M(可能是做了定制化),系统FoV增加了2倍左右。
在算力平台方面,斯巴鲁弃用了ASIC定制芯片转而使用赛灵思的FPGA(Zynq UltraScale+ MPSoC),除了满足双目立体视觉本身的处理性能提升,部分算力还将用于实现雷达和立体视觉系统的融合。
这套系统的功能激活目前限定在日本的高速公路上使用,提供包括进入弯道时的速度控制、接近收费站时的速度控制、车道变更、可放开双手的交通拥堵辅助等功能。
和激光雷达相比,通过立体视觉生成的数据更丰富,这反过来使障碍物检测更容易。在弱光情况下,立体视觉分辨率也更高。除了分辨率和准确性,两个摄像头中的每一个都可以作为独立的单目摄像头,提供冗余感知能力。
同时,也可以用于并行执行单目CNN算法,如目标分类。同时,立体视觉具备检测普通3D形状的能力,而不需要类似单目的基于样本的大量训练。此外,主流芯片也都推出了立体视觉匹配的模块。
在整体性能不断提升的背景下,双目立体感知方案的热度还在持续提升。

比如,由华为、宁德时代和长安汽车打造的全新汽车品牌阿维塔,旗下第一款智能纯电SUV将搭载华为全栈智能汽车解决方案,其中,就包括双目立体感知摄像头。
但,市场增量还不明确。尤其是单目、单目+雷达、多目+激光雷达等不同方案的成本竞争同样白热化。
初创公司各寻出路
不过,这个赛道的难度,并不小,尤其是对于初创公司来说。
一年前,奇瑞汽车宣布与以色列视觉感知供应商Foresight签署商业合作备忘录,对后者的QuadSight(四目)视觉原型系统进行技术评估,并寻求进一步量产落地的可能性。
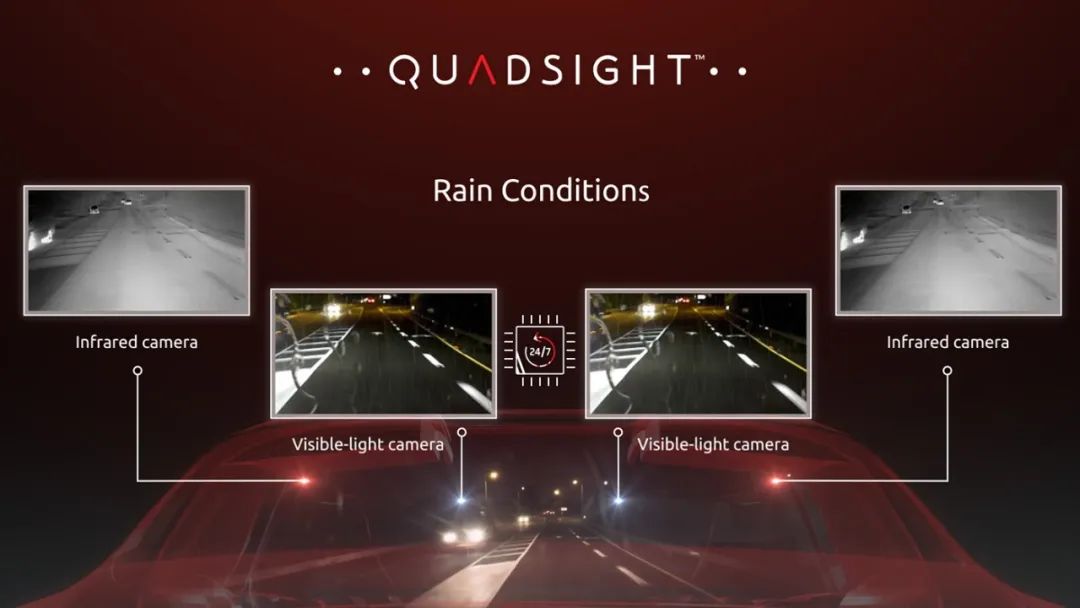
Foresight主推的四目视觉系统QuadSight的创新,在于现有双目系统的基础上,增加了两个红外摄像头,这使得探测范围从可见光扩展到红外波段。在传统双目的基础上,红外探测可以改进夜间探测以及各种天气条件的适配。
该公司于1977年9月在以色列成立,是一家从事设计,开发的视觉技术公司,基于专有的计算机视觉,视频运动检测和机器学习软件,技术是基于母公司与以色列军方十多年的合作。
这套方案的相关技术指标包括,1、全天候天气光照条件下运行;2、30FPS的动态分辨率;3、100米范围内小于10%的深度精度,最小识别目标35cm*25cm;4、3D自动校准的柔性基线;5、大于45˚的广角视场。
此外,该公司还有两项产品,分别是双目视觉系统Eye-On™和V2X解决方案Eye-Net™。其中,Eye-On™的方案命名为:Mono2Stereo™,采用挡风玻璃+前散热隔栅(通常是全景环视前摄像头位置)的双目立体感知技术。
这套方案的优势,是基于现有的双单目摄像头方案,通过软件算法实现立体感知的效果。好处是解决了传统短基线、固定对称摄像头的硬件布局,灵活性更大,并且可以基于现有市场方案进行快速适配。
Eye-Net™超视距事故预防解决方案,则是基于V2X蜂窝移动网络,通过使用智能手机并依靠现有的蜂窝移动网络实时向行人和车辆提供碰撞警报。同时,系统与智能交通基础设施系统进行集成V2X功能,增加系统的安全冗余。
不过,这家公司目前仍没有具体的量产定点项目,此前,大多数是与车企、Tier1的一些预研项目。这也是很多初创公司的现状。
财务数据显示,Foresight在2021年全年净亏损1504万美元,几乎维持2020年的水平。2021年第四季度公司的研发费用为264.7万美元,而2020年第四季度为218.9万美元。截至2021年12月31日的全年净研发费用为1017万美元。
去年12月,Foresight宣布与一家欧洲乘用车制造商成功完成POC项目的第二阶段。整个项目的总收益仅为12万美元,双方正在讨论未来继续合作的可能,其中包括联合开发项目以及潜在的前装量产机会。
为了增加收入机会,过去几年时间,这家公司开始寻求非汽车行业的业务突破,比如,机器人系统开发、农业、采矿以及特定场景的自动驾驶专用车辆。此外,还在中国成立子公司,寻求本地业务开拓。
今年5月,该公司与来自中国的无人驾驶智能产品制造商顺为智能签署合作协议,基于立体感知技术,开发特殊无人驾驶车辆的感知系统,比如顺为智能在无人农用机械和重型机械的产品方案。该公司的核心团队主要来自中国科学院自动化研究所、清华汽车研究院、博世、宝马、北汽集团等业内机构和企业。
而在中国本土市场,双目立体感知方案商元橡科技,则是通过与Tier1保隆科技合作进入前装赛道。此前,双方除了在商用车前装实现量产,今年又拿到了基于双目立体视觉的乘用车主动悬架路面预瞄系统的首家前装定点。
不过,为了保证收入的可持续性(尤其是汽车前装项目周期较长),该公司也在同时布局机器人视觉、工业检测、无人机、工业及消费机器人、智慧物流、智能仓储等非汽车领域。
显然,对于没有Tier1能力的初创公司,难度可想而知。
这篇关于双目立体感知市场启动?小众路线背后的生存难题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






