本文主要是介绍从相机空间到像素空间的投影和反投影原理和代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
从相机空间到像素空间的投影
效果
编辑
公式
编辑
代码
像素空间到相机空间的反投影
记录一下从相机空间到像素空间的投影(3D-->2D)和像素空间到相机空间的反投影(2D-->3D)。
推荐blog:SLAM入门之视觉里程计(2):相机模型(内参数,外参数) - Brook_icv - 博客园 (cnblogs.com)
从相机空间到像素空间的投影
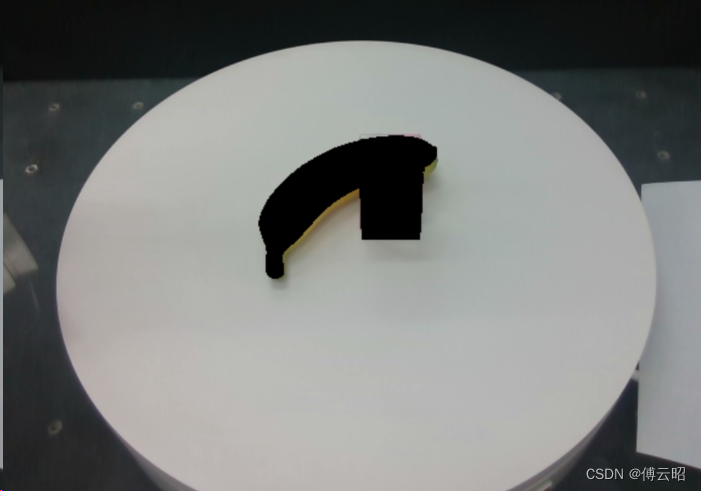
主要是估计出物体相对相机的位姿之后,把物体投影到2D像素平面看看mask,想看看根据marker的位姿传播的误差大不大。即看看投影误差。
效果

还是存在一些误差
公式

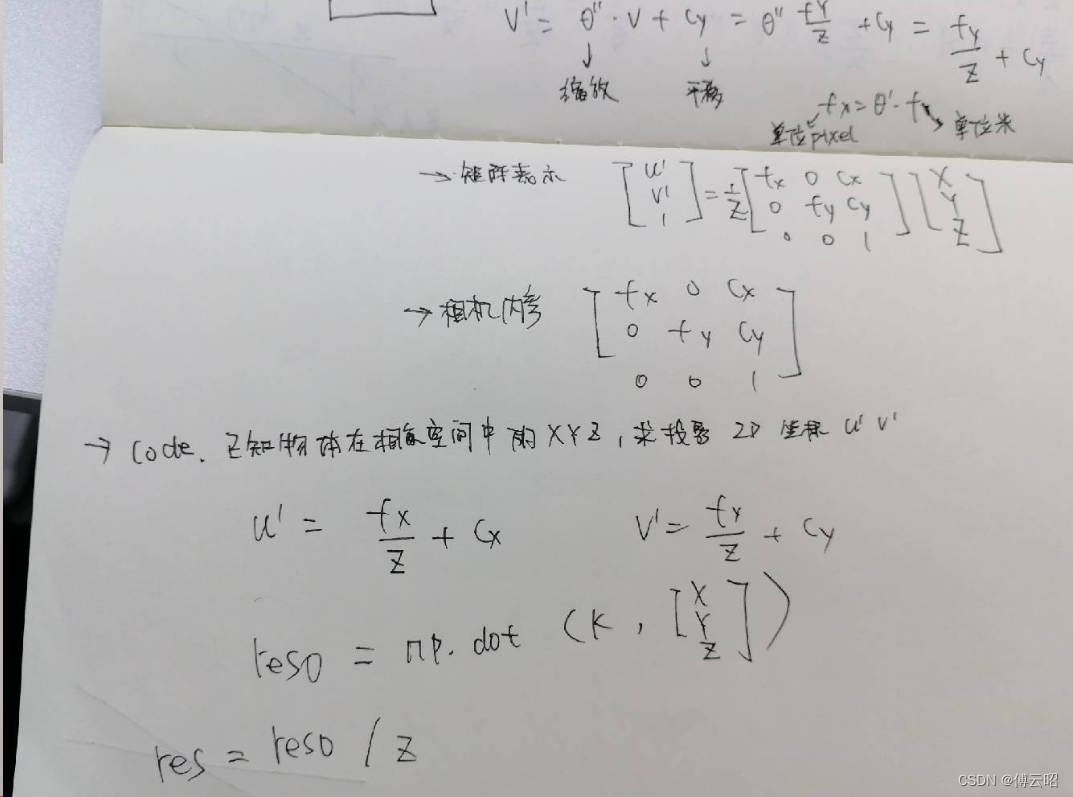
代码
我这里的代码是从物体坐标系--》相机坐标系--》像素坐标系
def project3Dto2D(points_local, center_local, pose, K, height, width):relative_points = points_local - center_local # (0,0,0), 物体在物体坐标系下的点云的坐标homogeneous_points = np.ones((4,relative_points.shape[0]))homogeneous_points[:3,:] = relative_points.transpose()camera_points = np.matmul(pose, homogeneous_points) # 物体在cam坐标系下的点云的坐标image_points = np.matmul(K, camera_points[:3,:]) # 相机坐标系下的点云坐标投影到图像平面assert np.min(image_points[2]) > 0image_points[0] = image_points[0]/image_points[2] # 将投影后的图像坐标除以深度,得到归一化坐标。image_points[1] = image_points[1]/image_points[2]pixel_points = np.round(image_points[:2,:]) # 对归一化坐标取整,得到像素坐标。mask1 = pixel_points[0,:] > -1 # 根据像素坐标的范围进行剪裁,即将超出图像范围的点云剔除。mask2 = pixel_points[1,:] > -1mask3 = pixel_points[0,:] < widthmask4 = pixel_points[1,:] < heightmask = mask1&mask2&mask3&mask4selected_index = np.where(mask)pixel_points = np.take(pixel_points, selected_index[0], axis=1)depth = np.take(image_points[2,:], selected_index[0])return pixel_points.astype(int), depth像素空间到相机空间的反投影
主要是根据yolov8检测的mask(u,v),获取对应的深度值z,根据uvz求解出物体的在相机坐标下的3D坐标(XYZ)
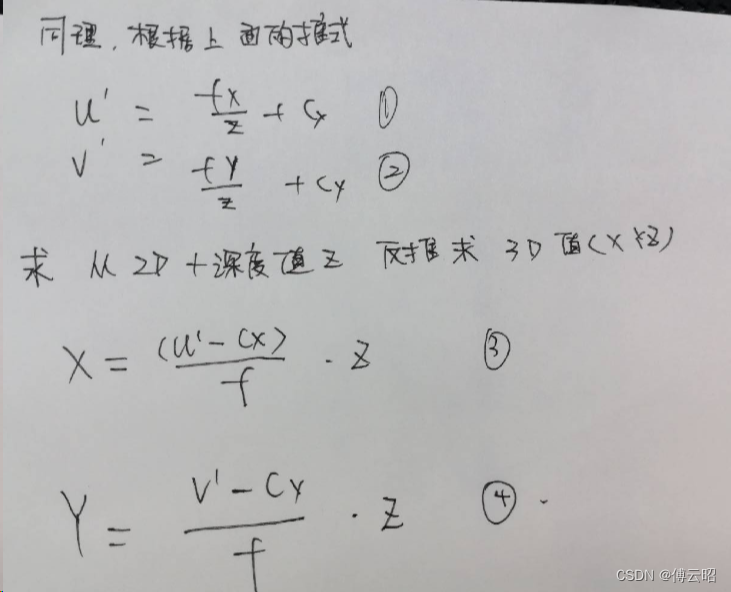
cx, cy, fx, fy = 323, 238, 616, 616
x = (u - cx) / fx
y = (v - cy) / fy
x = x * z
y = y * z这篇关于从相机空间到像素空间的投影和反投影原理和代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






