本文主要是介绍(学习日记)2024.03.18:UCOSIII第二十节:移植到STM32,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
写在前面:
由于时间的不足与学习的碎片化,写博客变得有些奢侈。
但是对于记录学习(忘了以后能快速复习)的渴望一天天变得强烈。
既然如此
不如以天为单位,以时间为顺序,仅仅将博客当做一个知识学习的目录,记录笔者认为最通俗、最有帮助的资料,并尽量总结几句话指明本质,以便于日后搜索起来更加容易。
标题的结构如下:“类型”:“知识点”——“简短的解释”
部分内容由于保密协议无法上传。
点击此处进入学习日记的总目录
2024.03.18
- 三十四、移植到STM32
- 1、在工程中添加文件分组
- 2、添加文件到对应分组
- 3、添加头文件路径到工程中
- 4、具体的工程文件修改
- 5、修改源码中的bsp.c与bsp.h文件
- 6、按需配置最适的工程
- 1. os_cfg.h
- 2. cpu_cfg.h
- 3. os_cfg_app.h
- 7、修改app.c
三十四、移植到STM32
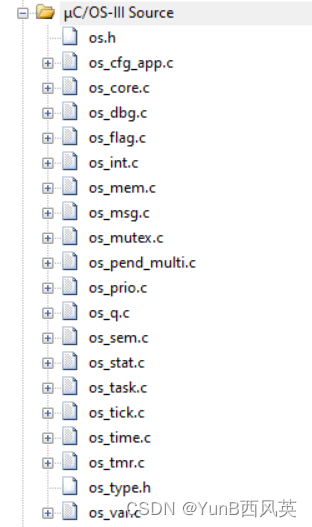
在前一章节中,我们看到了μC/OS-III源码中那么多文件,一开始学我们根本看不过来那么多文件,我们需要提取源码中的最简洁的部分代码, 方便我们学习。
更何况我们学习的只是μC/OS-III的实时内核中的知识,因为这才是μC/OS-III的核心,那些demo都是基于此移植而来的。
上一章节我们只是将μC/OS-III的源码放到了本地工程目录下,还没有添加到开发环境里面的组文件夹里面,所以μC/OS-III也就没有移植到我们的工程中去。
现在开始讲μC/OS-III的源码添加到工程中。
1、在工程中添加文件分组
我们需要先在工程中创建一些分组,方便我们分模块管理μC/OS-III中的文件,就按照μC/OS-III官方的命名方式创建我们的文件分组即可

2、添加文件到对应分组
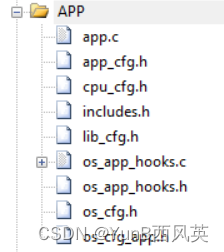
向APP分组添加User->APP文件夹下的所有文件
向BSP分组添加“User->BSP文件夹下的所有文件

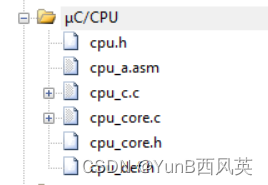
向μC/CPU分组添加User->uC-CPU文件夹下的所有文件 和 User->uC-CPU->ARM-Cortex-M3->RealView文件夹下的所有文件
向μC/LIB分组添加User->uC-LIB文件夹下的所有文件 和User->uC-LIB->Ports->ARM-Cortex-M3->RealView文件夹下的所有文件

向μC/OS-III Source分组添加User->μC/OS-III->Source文件夹下的所有文件
向μC/OS-III Port分组添加User->μC/OS-III->Ports->ARM-Cortex-M3->Generic->RealView文件夹下的所有文件

至此,我们的源码文件就添加到工程中了,当然此时仅仅是添加而已,并不是移植成功了,如果你编译一下工程就会发现一大堆错误,所以还需努力移植工程才行。
3、添加头文件路径到工程中
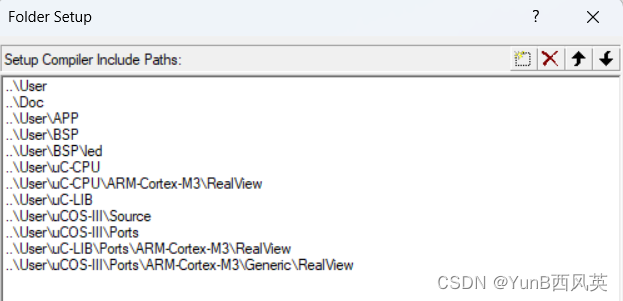
μC/OS-III的源码已经添加到开发环境的组文件夹下面,编译的时候需要为这些源文件指定头文件的路径,不然编译会报错。
此时我们先将头文件添加到我们的 工程中,具体见图:
至此,μC/OS的整体工程基本移植完毕,我们需要修改μC/OS配置文件,按照我们的需求来进行修改。
4、具体的工程文件修改
添加完头文件路径后,我们可以编译一下整个工程,但肯定会有错误的, μC/OS-III 的移植尚未完毕,接下来需要对工程文件进行修改。
首先修改工程的启动文件“ startup_stm32f10x_hd.s”。
其中将PendSV_Handler 和 SysTick_Handler 分别改为OS_CPU_PendSVHandler 和OS_CPU_SysTickHandler,各三处共六处。

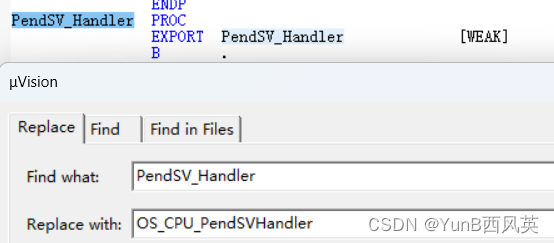

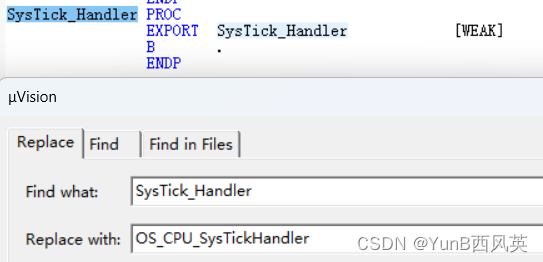
因为μC/OS官方已经给我们处理好对应的中断函数,就无需我们自己处理与系统相关的中断了。
同时我们还需要将stm32f10x_it.c文件中的PendSV_Handler和SysTick_Handler函数注释掉(当然不注释掉也没问题的)
5、修改源码中的bsp.c与bsp.h文件
我们知道bsp就是板级相关的文件,也就是对应开发板的文件,而μC/OS-III源码的bsp肯定是与我们的板子不一样, 所以就需要进行修改。
而且以后我们的板级外设都在bsp.c文件进行初始化,所以按照我们修改好的源码进行修改即可
#define BSP_MODULE
#include <bsp.h>CPU_INT32U BSP_CPU_ClkFreq_MHz;#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004#define DBGMCU_CR_TRACE_IOEN_MASK 0x10
#define DBGMCU_CR_TRACE_MODE_ASYNC 0x00
#define DBGMCU_CR_TRACE_MODE_SYNC_01 0x40
#define DBGMCU_CR_TRACE_MODE_SYNC_02 0x80
#define DBGMCU_CR_TRACE_MODE_SYNC_04 0xC0
#define DBGMCU_CR_TRACE_MODE_MASK 0xC0#define DEM_CR_TRCENA (1 << 24)#define DWT_CR_CYCCNTENA (1 << 0)void BSP_Init (void)
{LED_Init ();}CPU_INT32U BSP_CPU_ClkFreq (void)
{RCC_ClocksTypeDef rcc_clocks;RCC_GetClocksFreq(&rcc_clocks);return ((CPU_INT32U)rcc_clocks.HCLK_Frequency);
}#if ((APP_CFG_PROBE_OS_PLUGIN_EN == DEF_ENABLED) && \(OS_PROBE_HOOKS_EN == 1))
void OSProbe_TmrInit (void)
{
}
#endif#if ((APP_CFG_PROBE_OS_PLUGIN_EN == DEF_ENABLED) && \(OS_PROBE_HOOKS_EN == 1))
CPU_INT32U OSProbe_TmrRd (void)
{return ((CPU_INT32U)DWT_CYCCNT);
}
#endif#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{CPU_INT32U cpu_clk_freq_hz;DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA;DWT_CYCCNT = (CPU_INT32U)0u;DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;cpu_clk_freq_hz = BSP_CPU_ClkFreq();CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
bsp.h文件中需要添加我们自己的板级驱动头文件
#include"stm32f10x.h"// Modified by fire#include <app_cfg.h>#include"bsp_led.h"// Modified by fire
6、按需配置最适的工程
虽然前面的编译是没有错误的,并且工程模板也是可用的,但是此时还不是我们最适合使用的工程模板。
最适合的工程往往是根据需要进行配置的,而μC/OS提供裁剪的功能,我们可以按需对系统进行裁剪。
1. os_cfg.h
os_cfg.h文件是系统的配置文件,主要是让用户自己配置一些系统默认的功能。
用户可以选择某些或者全部的功能, 比如消息队列、信号量、互斥量、事件标志位等,系统默认全部使用。
如果如果用户不需要的话,则可以直接关闭, 在对应的宏定义中设置为0即可,这样子就不会占用系统的SRAM,以节省系统资源
#ifndef OS_CFG_H
#define OS_CFG_H/* --- 其他配置 --- */
#define OS_CFG_APP_HOOKS_EN 1u/* 是否使用钩子函数 */
#define OS_CFG_ARG_CHK_EN 1u/* 是否使用参数检查 */
#define OS_CFG_CALLED_FROM_ISR_CHK_EN 1u/* 是否使用中断调用检查 */
#define OS_CFG_DBG_EN 1u/* 是否使用debug */
#define OS_CFG_ISR_POST_DEFERRED_EN 1u/* 是否使用中断延迟post操作*/
#define OS_CFG_OBJ_TYPE_CHK_EN 1u/* 是否使用对象类型检查 */
#define OS_CFG_TS_EN 1u/*是否使用时间戳 */#define OS_CFG_PEND_MULTI_EN 1u/*是否使用支持多个任务pend操作*/#define OS_CFG_PRIO_MAX 32u/*定义任务的最大优先级 */#define OS_CFG_SCHED_LOCK_TIME_MEAS_EN 1u/*是否使用支持测量调度器锁定时间 */
#define OS_CFG_SCHED_ROUND_ROBIN_EN 1u/* 是否支持循环调度 */
#define OS_CFG_STK_SIZE_MIN 64u/* 最小的任务栈大小 *//* ---------- 事件标志位---------- */
#define OS_CFG_FLAG_EN 1u/*是否使用事件标志位 */
#define OS_CFG_FLAG_DEL_EN 1u/*是否包含OSFlagDel()的代码 */
#define OS_CFG_FLAG_MODE_CLR_EN 1u/*是否包含清除事件标志位的代码*/
#define OS_CFG_FLAG_PEND_ABORT_EN 1u/*是否包含OSFlagPendAbort()的代码*//* --------- 内存管理 --- */
#define OS_CFG_MEM_EN 1u/* 是否使用内存管理 *//* -------- 互斥量 ----- */
#define OS_CFG_MUTEX_EN 1u/*是否使用互斥量 */
#define OS_CFG_MUTEX_DEL_EN 1u/*是否包含OSMutexDel()的代码*/
#define OS_CFG_MUTEX_PEND_ABORT_EN 1u/*是否包含OSMutexPendAbort()的代码*//* ------- 消息队列--------------- */
#define OS_CFG_Q_EN 1u/* 是否使用消息队列 */
#define OS_CFG_Q_DEL_EN 1u/* 是否包含OSQDel()的代码 */
#define OS_CFG_Q_FLUSH_EN 1u/* 是否包含OSQFlush()的代码 */
#define OS_CFG_Q_PEND_ABORT_EN 1u/* 是否包含OSQPendAbort()的代码*//* -------------- 信号量 --------- */
#define OS_CFG_SEM_EN 1u/*是否使用信号量 */
#define OS_CFG_SEM_DEL_EN 1u/*是否包含OSSemDel()的代码*/
#define OS_CFG_SEM_PEND_ABORT_EN 1u/*是否包含OSSemPendAbort()的代码*/
#define OS_CFG_SEM_SET_EN 1u/*是否包含OSSemSet()的代码 *//* ----------- 任务管理 -------------- */
#define OS_CFG_STAT_TASK_EN 1u/* 是否使用任务统计功能 */
#define OS_CFG_STAT_TASK_STK_CHK_EN 1u/* 从统计任务中检查任务栈 */#define OS_CFG_TASK_CHANGE_PRIO_EN 1u/* 是否包含OSTaskChangePrio()的代码*/
#define OS_CFG_TASK_DEL_EN 1u/* 是否包含OSTaskDel()的代码*/
#define OS_CFG_TASK_Q_EN 1u/*是否包含OSTaskQXXXX()的代码*/
#define OS_CFG_TASK_Q_PEND_ABORT_EN 1u/* 是否包含OSTaskQPendAbort()的代码 */
#define OS_CFG_TASK_PROFILE_EN 1u/* 是否在OS_TCB中包含变量以进行性能分析 */
#define OS_CFG_TASK_REG_TBL_SIZE 1u/*任务特定寄存器的数量 */
#define OS_CFG_TASK_SEM_PEND_ABORT_EN 1u/* 是否包含OSTaskSemPendAbort()的代码 */
#define OS_CFG_TASK_SUSPEND_EN 1u/*是否包含OSTaskSuspend()和OSTaskResume()的代码*//* ------- 时间管理 ------- */
#define OS_CFG_TIME_DLY_HMSM_EN 1u/*是否包含OSTimeDlyHMSM()的代码*/
#define OS_CFG_TIME_DLY_RESUME_EN 1u/*是否包含OSTimeDlyResume()的代码*//* ---------- 定时器管理 ------- */
#define OS_CFG_TMR_EN 1u/* 是否使用定时器 */
#define OS_CFG_TMR_DEL_EN 1u/* 是否支持OSTmrDel() */#endif
2. cpu_cfg.h
cpu_cfg.h文件主要是配置CPU相关的一些宏定义,我们可以选择对不同的CPU进行配置。
当然,如果我们没有对CPU很熟悉的话, 就直接忽略这个文件即可。
在这里我们只需要注意关于时间戳与前导零指令相关的内容,我们使用的CPU是STM32,是32位的CPU, 那么时间戳我们使用32位的变量即可。
而且STM32支持前导零指令,可以使用它让系统进行寻找最高优先级的任务更加快捷
#ifndef CPU_CFG_MODULE_PRESENT
#define CPU_CFG_MODULE_PRESENT/* 是否使用CPU名字:DEF_ENABLED或者DEF_DISABLED */
#define CPU_CFG_NAME_EN DEF_ENABLED/* CPU名字大小(ASCII字符串形式) */
#define CPU_CFG_NAME_SIZE 16u/* CPU时间戳功能配置(只能选择其中一个) */
/* 是否使用32位的时间戳变量:DEF_ENABLED或者DEF_DISABLED */
#define CPU_CFG_TS_32_EN DEF_ENABLED
/* 是否使用64位的时间戳变量:DEF_ENABLED或者DEF_DISABLED */
#define CPU_CFG_TS_64_EN DEF_DISABLED
/* *配置CPU时间戳定时器字大小 */
#define CPU_CFG_TS_TMR_SIZE CPU_WORD_SIZE_32/* 是否使用测量CPU禁用中断的时间 */
#if 0
#define CPU_CFG_INT_DIS_MEAS_EN
#endif
/* 配置测量的次数*/
#define CPU_CFG_INT_DIS_MEAS_OVRHD_NBR 1u/* 是否使用CPU前导零指令(需要硬件支持,在stm32我们可以使用这个指令) */
#if 1
#define CPU_CFG_LEAD_ZEROS_ASM_PRESENT
#endif#endif
μC/OS支持两种方法选择下一个要执行的任务:
一个采用C语言实现前导零指令,这种方法我们通常称为通用方法, CPU_CFG_LEAD_ZEROS_ASM_PRESENT没有被定义的时候使用才使用通用方法获取下一个即将运行的任务。
通用方法可以用于所有μC/OS支持的硬件平台,因为这种方法是完全用C语言实现,所以效率略低于特殊方法, 但不强制要求限制最大可用优先级数目;
另一个是硬件方式查找下一个要运行的任务, 必须定义CPU_CFG_LEAD_ZEROS_ASM_PRESENT这个宏。
因为这种方法是必须依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令, 在M3、M4、M7内核中都有,这个指令是用来计算一个变量从最高位开始的连续零的个数),所以效率略高于通用方法,但受限于硬件平台。
3. os_cfg_app.h
os_cfg_app.h是系统应用配置的头文件,简单来说就是系统默认的任务配置,如任务的优先级、栈大小等基本信息。
但是有两个任务是必须开启的,一个就是空闲任务,另一个就是时钟节拍任务,这两个是让系统正常运行的最基本任务,而其他任务我们自己按需配置即可。
#ifndef OS_CFG_APP_H
#define OS_CFG_APP_H/* --------------------- MISCELLANEOUS ------------------ */
#define OS_CFG_MSG_POOL_SIZE 100u/* 支持的最大消息数量 */
#define OS_CFG_ISR_STK_SIZE 128u/*ISR栈的大小 */
#define OS_CFG_TASK_STK_LIMIT_PCT_EMPTY 10u/*检查栈的剩余大小(百分百形式,此处是10%)*//* ---------------------- 空闲任务 --------------------- */
#define OS_CFG_IDLE_TASK_STK_SIZE 128u/* 空闲任务栈大小 *//* ------------------ 中断处理任务------------------ */
#define OS_CFG_INT_Q_SIZE 10u/*中断处理任务队列大小 */
#define OS_CFG_INT_Q_TASK_STK_SIZE 128u/* 中断处理任务的栈大小*//* ------------------- 统计任务------------------- */
#define OS_CFG_STAT_TASK_PRIO 11u/* 统计任务的优先级 */
#define OS_CFG_STAT_TASK_RATE_HZ 10u/* 统计任务的指向频率(10HZ)*/
#define OS_CFG_STAT_TASK_STK_SIZE 128u/*统计任务的栈大小*//* ------------------------ 时钟节拍任务 ----------------------- */
#define OS_CFG_TICK_RATE_HZ 1000u/*系统的时钟节拍(一般为10 到 1000 Hz) */
#define OS_CFG_TICK_TASK_PRIO 1u/*时钟节拍任务的优先级 */
#define OS_CFG_TICK_TASK_STK_SIZE 128u/* 时钟节拍任务的栈大小*/
#define OS_CFG_TICK_WHEEL_SIZE 17u/* 时钟节拍任务的列表大小 *//* ----------------------- 定时器任务 ----------------------- */
#define OS_CFG_TMR_TASK_PRIO 11u/*定时器任务的优先级 */
#define OS_CFG_TMR_TASK_RATE_HZ 10u/* 定时器频率(10 Hz是典型值) */
#define OS_CFG_TMR_TASK_STK_SIZE 128u/* 定时器任务的栈大小 */
#define OS_CFG_TMR_WHEEL_SIZE 17u/*定时器任务的列表大小 */#endif
此处要注意时钟节拍任务,μC/OS的时钟节拍任务是用于管理时钟节拍的,建议将其优先级设置更高一些。
这样子在调度的时候,时钟节拍任务 能抢占其他任务执行,从而能够更新任务。
相对于其他操作系统寻找处于最高优先级的就绪任务都是在中断中,μC/OS将其放于任务中能更好解决 关中断时间过长 的问题。
7、修改app.c
我们将原来裸机工程里面app.c的文件内容全部删除,新增如下内容
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
#include <includes.h>/*
*************************************************************************
* 变量
*************************************************************************
*//*
*************************************************************************
* 函数声明
*************************************************************************
*//*
*************************************************************************
* main 函数
*************************************************************************
*/
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{/*暂时没有在main里面创建任务应用任务 */
}
这篇关于(学习日记)2024.03.18:UCOSIII第二十节:移植到STM32的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







