本文主要是介绍两点天上来,爱情一线牵——Global Timing Debugger,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

今天我们来介绍一下时序分析的小工具——Global Timing Debugger(简称GTD)。 它是Innovus/ Encounter中分析Data Path的工具, 和Clock Tree Debugger有众多相似的地方。
顾名思义, Global Timing Debugger就是用来debug timing。对于一些新人来说, 可能看懂和分析timing report是一件很困难的事, 而GTD它最大的好处就是将timing report里面的内容结合Innovus GUI, 以图形化的形式表现出来, 这样就很方便于我们去Debug timing path上问题。经常有人问我, Innovus/Encounter中如何去Highlight一条Timing Path之类的问题, 相信看完这篇文章, 大家一定会了解怎么去做这些事情了。
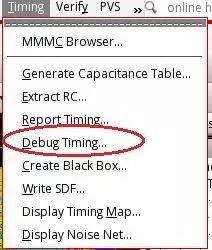
让我们进入正题, 我们通过打开Timing下面的Debug Timing子菜单来打开GTD
然后会出现如下窗口, 使用GTD前, 需要有一个machine readable格式的timing report文件, 该文件可以通过report_timing -machine_readable或者timeDesign -timingDebugReport命令得到。如果已经产生过该文件, 就把Generate前面的勾去掉。

Check Type:可以选择setup或者hold分析。
Append to Current Report:可以将当前timing分析结果添加在之前分析结果之后, 以不同颜色区分显示

Path Category File: 指定Path category文件的目录,这个后面会介绍到Path category的作用。
单击OK以后, 进入GTD正式的主界面, 整个GTD界面分为Path Histogram(路径统计图)、 Category Summary(分类汇总)、 Path Category(路径分类)、 Path Analysis(路径分析)、 Path List(具体路径)、 Preference(设置)、 Timing Path Analyzer(路径分析器), 分别对应这下图中的数字编号, 下面我们来一一介绍一下这些模块。
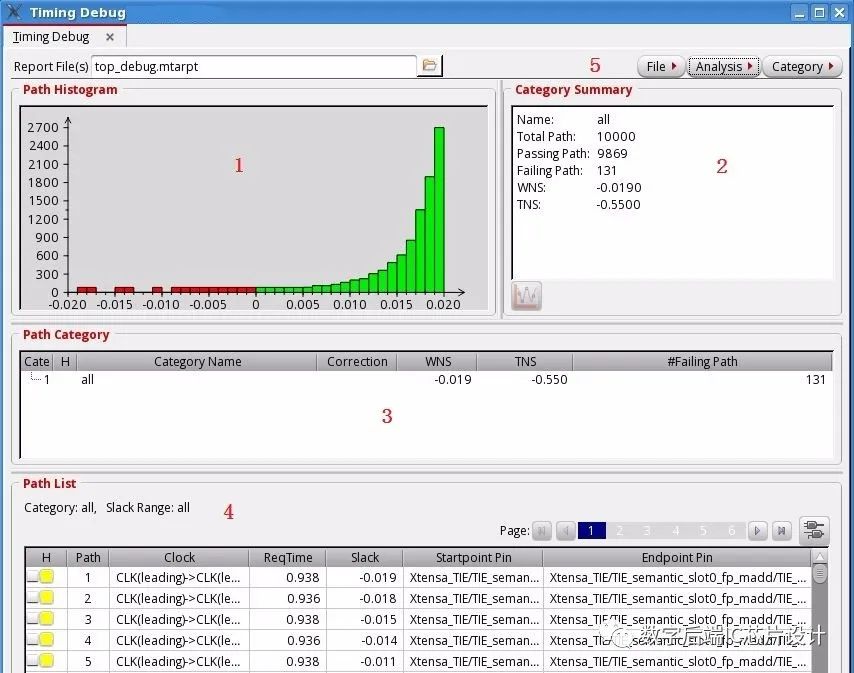
Path Histogram
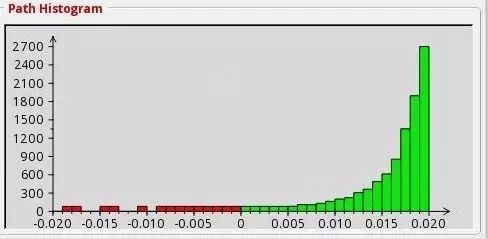
这个就是一个总体的路径柱状统计图, 很简单, 纵坐标是Path数量, 横坐标是对应的slack值, 绿色柱条代表Slack为正, 红色柱条代表Slack为负。
Category Summary
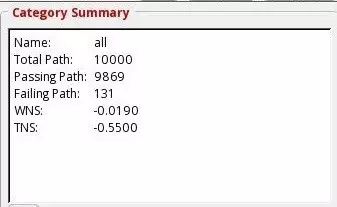
该模块会显示每种Category的具体内容, 包括Pass, Fail的timing path数量, 以及WNS和TNS, 是GTD里很重要的一个概念。默认只显示All的category, 我们可以自定义category的组成, 单击Category Summary右上方的Category, 如下图所示:
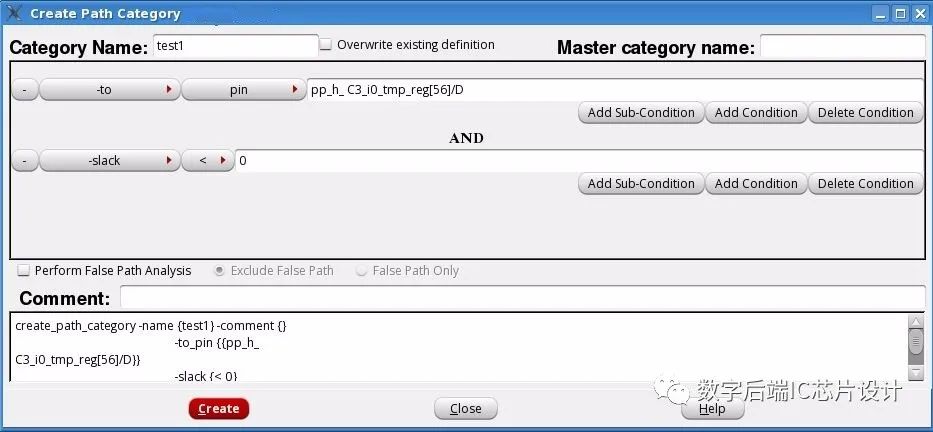
我们可以Save和Load已有的Category文件,当然也可以自己创建一个,如下图所示:
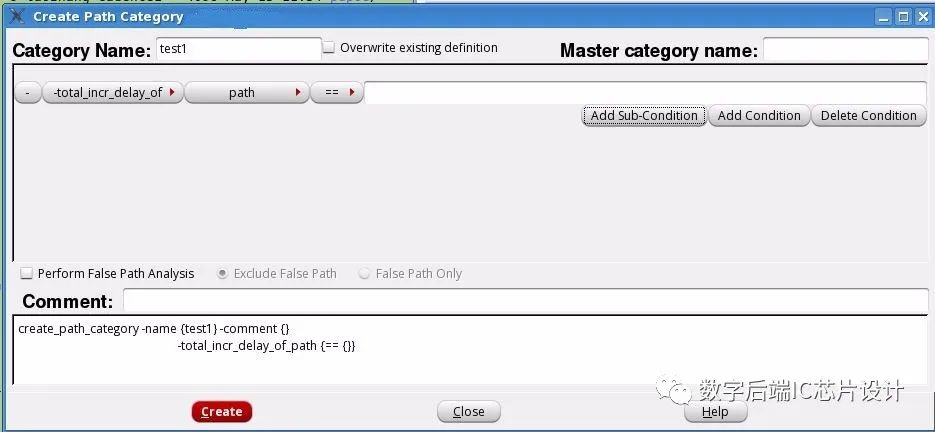
我们可以将具体某种或者多个共同特性的path归化到某个category中, 可以选择的特性有以下几种:这些概念大家都很清楚吧,不过多介绍了

比如我们可以将以某个instance的pin为终点, 并且slack值小于0的path设成一个category, 如下图所示: Add Sub-Condition和Add Condition分别控制添加OR和AND条件
创建完以后我们就可以在GTD上看到这个category了

我们可以看到,在我们创建的的test1这个category中, 有32条path符合我们要求, 另外剩下的99条就被归类到uncategorized中。
我们也可以在已有的category中创建下属的category, 在Master category name中填写现有的category就行, 比如:我们希望在前面test1的category中找出经过TIE_semantic_slot0_fp_madd/FE_OCPC849_C2_partial1_56_这个instance的path, 就可以这样填写:

然后, 在GUI上, 你可以看到原来的test1 category下又会有一个新的category test1_sub

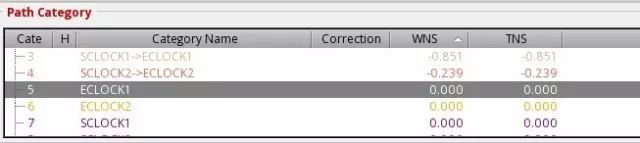
Path Category
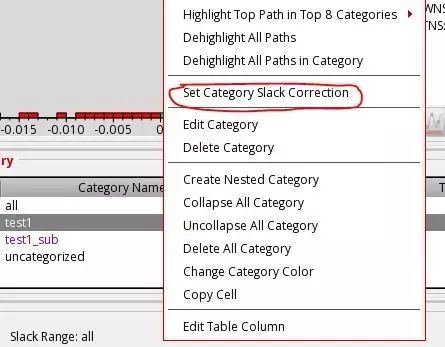
这个表上面已经介绍过, 里面显示了所有Path Category的信息。这边Correction一栏需要介绍一下, 这是一个我们自己对此类category预估的slack值修正, 可以通过右键“Set Category Slack Correction”来设置。
比如原来test1这组category的WNS, TNS情况如下

如果设置了0.011的slack修正值, test1的WNS, TNS和Failing Path都会修正成原来slack加上0.011以后的值, 鼠标长时间停留在该组category上, 就会看到修正前后的timing情况

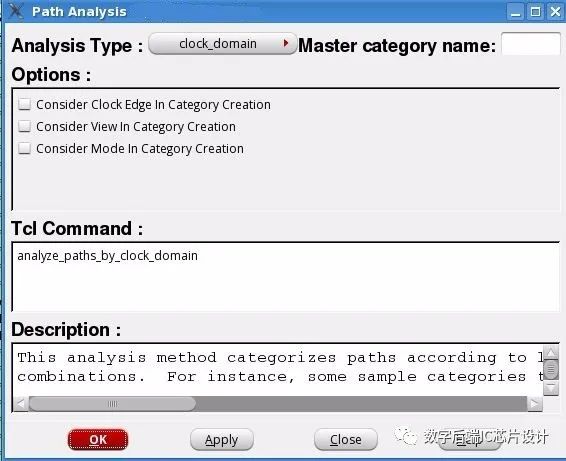
Path Analysis
介绍完了Path Category, GTD里面还支持基本类型的Path Analysis, 单击GTD右上角Analysis选项, 现在我们Innovus/ Encounter支持的Path分析类型有以下几种
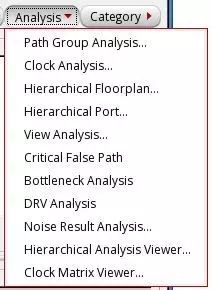
Path Group Analysis:按照基本Path Group分析, 包括reg2reg, in2reg, reg2out, in2out。
比如我们在前面说创建的test1 category中再细分出reg2reg的分析类型, 那可以先在Master category name中填入test1, 分析类型选择basic path group
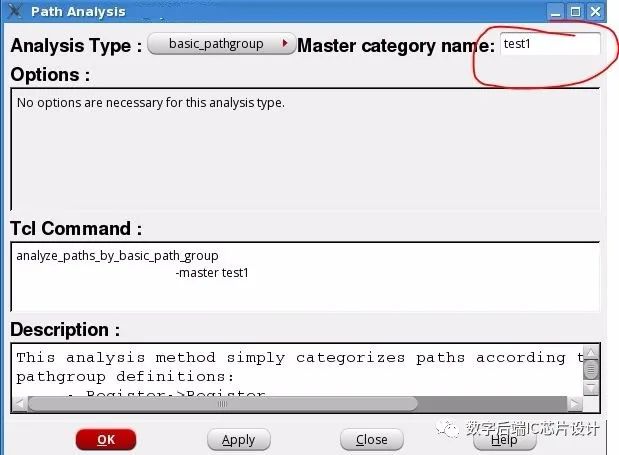
这样, 在GTD上就会细分出test1 category子集中的reg2reg path类型,

Clock Analysis:按照Launch和Capture clock的组合来划分,默认会划分两个category:
1. 起点和终点都来自一个clock的Path
2. 起点和终点来自不同的clock的Path
创建以后,GTD上如下图所示:
当然, 我们也可以考虑clock的Edge, 以及View和Mode来划分得更加细, 如下图所示

Hierarchical Floorplan: 按照Hierarchical层次结构来划分category, 可选的hierarchical项分为以下六种:Port, Hinst, Macro, Black Box, Std Cell, InstGroup
竖轴代表起点, 横轴代表终点, 比如我们想查看起点是Macro, 终点是在Hinst里的path, 就可以选择Macro=>Hinst这一栏.

GTD上就会显示所有符合该类型的category, 如下图所示:

Views Analysis: 按照analysis view来划分category, 这个很简单, 不过多介绍了

Bottleneck Analysis: 按照需要的max slack值来划分,这个也比较简单,不过多介绍了

DRV Analysis:按照DRV violation的类型来划分,

Path List
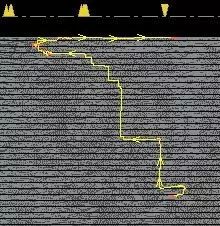
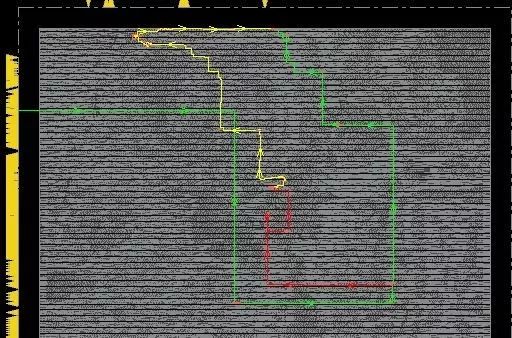
前面说到在Innovus/Encounter中如何Highlight一条timing path? 这一栏就解决了我们的问题。
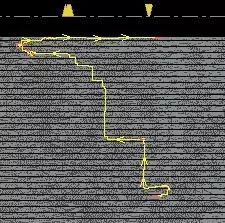
我们可以选择需要Highlight的path, 并且选择对应的颜色(默认是黄色), 对应的在GUI上就会把该条timing path highlight出来。如下图所示:

Timing Path Analyzer
那如何去分析这条Path呢?接下来,我们需要用到GTD里面的另一个分析具体Timing Path的小工具——Timing Path Analyzer
选中该条Timing Path,右键选择“Show Timing Path Analyzer”
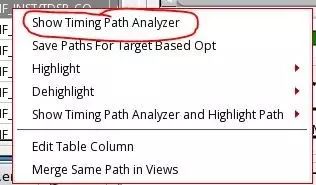
进入Timing Path Analyzer界面:
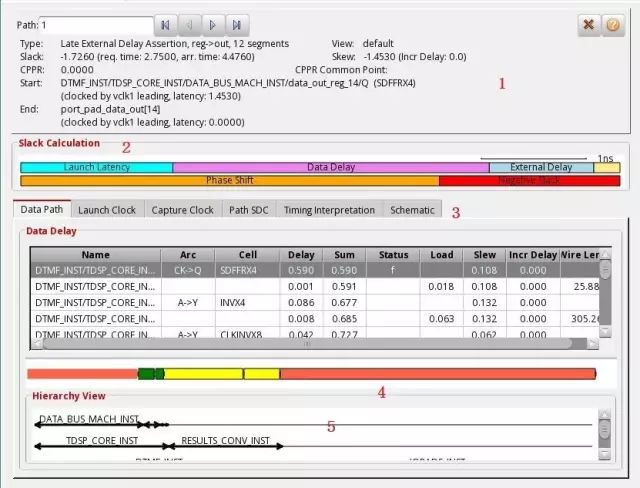
Timing Path Analyzer总体上就是将Innovus/Encounter的timing report图形化。按照上面图片的数字, 我将它分为以下几个板块(对应图上具体数字):
第一部分是基本的timing path信息,包括path类型,analysis view,Slack等等信息
第二部分其实就是一个图形化计算slack的显示, 上面一条直线代表Data Arrival Time, 下面一条代表Data Require Time
第三部分是具体每个section内容, Data Path, Launch Clock Path和Capture Clock Path就是三种path上的具体组成,分别对应着timing report。
下面的这一条timing bar会显示所有cell和net的delay占的比例。鼠标长时间停留会显示该段delay的具体情况

Hierarchy View:按层次显示了每个hInst占它上一级层次的Delay分布比例

Path SDC:列出和这条timing path相关联的sdc语句

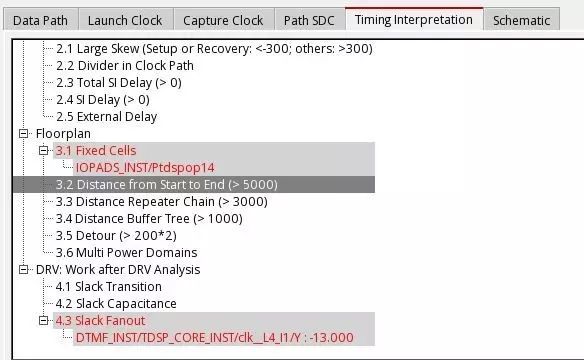
Timing Interpretation:显示出该条timing path中可能出现问题的地方,比如fanout过大, wire length太长等等, 用红色高亮表示。
Schematics:显示该条path的schematic电路图

Timing Debug Preferences
最后介绍一下GTD的一些设置参数吧,说实话,这个设置界面不好找,在File目录下面,而且在Timing Path Analyzer中也没有保留。

设置界面主要分为以下五块内容,General的设置比较繁琐,其他四栏只是一些基本的颜色设置。

General:
前面数字那些参数都是控制GTD上Path Histogram上的参数, 包括横坐标、纵坐标的数值、 间距等, 不一一介绍了, 作用不是很大, 取默认的就行。
DisableCommon Clock Delay Elements:Timing Path Analyzer中的data delay不显示launch and capture clock的common部分
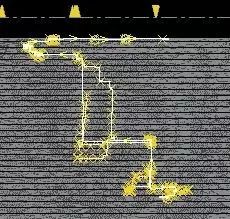
Highlight Clock Path withData Path: 把clock path也highlight出来,默认只高亮data path
红色直线代表Launch clock path,绿色直线代表特定的那段capture clock path
Exclude CPPR from Skew: 计算skew时不考虑CPPR
Appear Only In One Category: 在一个category中一条path只出现一次
Auto Resize in histogram: GTD中hide path category时自动隐藏Path histogram
Not Zoom In Delay Element:Timing Path Analyzer中选中cell或者net时,Innovus GUI不自动放大选中的东西
Select Delay Element With Connections: Timing Path Analyzer中选中cell或者net时,Innovus GUI上自动选择与它有连接性的东西
Overwrite Existing Group: 覆盖现有的path category group
Append to Current Highlight:Highlight Path时不清除原来已经highlight过的path
Highlight Path:Innovus GUI上highlight path的方式
Flightline:
Wire segment:
Whole Net:
Merge Path By: 把一些path按照对应要求merge, 可以选择按照StartPoint、 EndPoint、 StartClock和EndClock, 默认就是EndPoint。
剩余几个窗口都只是设置GTD上颜色的选项,平时一般不用修改,选择默认的就行
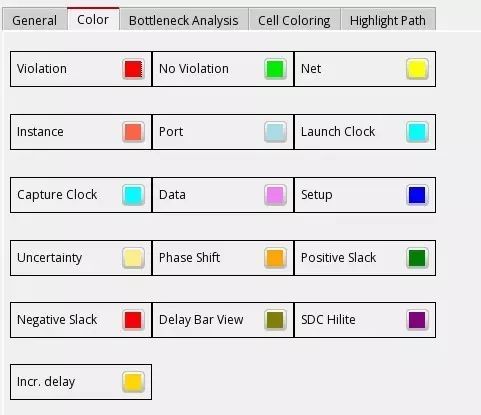
Color:最基本的颜色设置
Bottleneck Analysis: 控制某个cell的颜色, 如果在5~10条的violation path中都有它, 就mark成黄色, 10~15条就mark成橘黄色, 以此类推

Cell Coloring: 控制基本cell类型的颜色

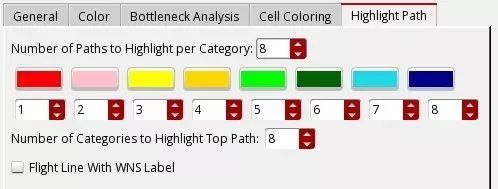
Highlight Path: 控制不同path category的颜色

Global Timing Debugger就介绍到这里了,很小的一个工具,但是对于初学timing分析的用户,还是有一定用处的。
往期回顾
静态时序分析STA合集一
静态时序分析STA合集二
时序基本概念介绍<sdc合集>
数字后端基本概念合集(一)
数字后端基本概念合集(二)
数字后端基本概念合集(三)
Low Power概念介绍合集
数字后端dbGet使用方法合集
号外,数字后端交流群招人啦
IC圈的世界杯 | 论芯片设计的胜利十一人
知否?知否?Block PD应该提交哪些数据?
Timing ECO手修攻略
数字后端面试100问(2019全新版)
数字后端面试100问(校招版)
简历请戳邮箱:taozhang3260@163.com
觉得有用的话,给我点个好看吧
这篇关于两点天上来,爱情一线牵——Global Timing Debugger的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!