本文主要是介绍专访沈劭劼:7千元干出城市NOA,大疆车载如何在「西瓜上雕树林」?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作者 |张祥威
编辑 |德新

在中国乃至全球智驾的供应商中,大疆车载是一家需要被重视的公司,这家公司在「极致性价比」的方向上进展极快。
去年,大疆发布了基于TITDA4 VH的量产方案,在五菱宝骏云朵等车型上进行了量产。一年后,随着智驾功能攻入城市场景,大疆车载又循着高性价比持续进阶。
3月17日,大疆车载在已量产的「7V+32TOPS」基础版配置上,推出「7V+100TOPS」及「10V+100TOPS」两个配置,并表示可以实现“无高精地图依赖、无激光雷达依赖”的城市领航以及其他所有L2+智能驾驶功能。
其中,「7V+32TOPS」方案只需将算力提升至100TOPS,而无需更改原有传感器构型,就可升级至城市领航功能,从而将城市领航的硬件BOM成本打到了7000元级别。
以上三个配置今年均有新款量产车落地,大疆车载的「成行平台」将全面覆盖市面主流8 - 25万多种动力车型。
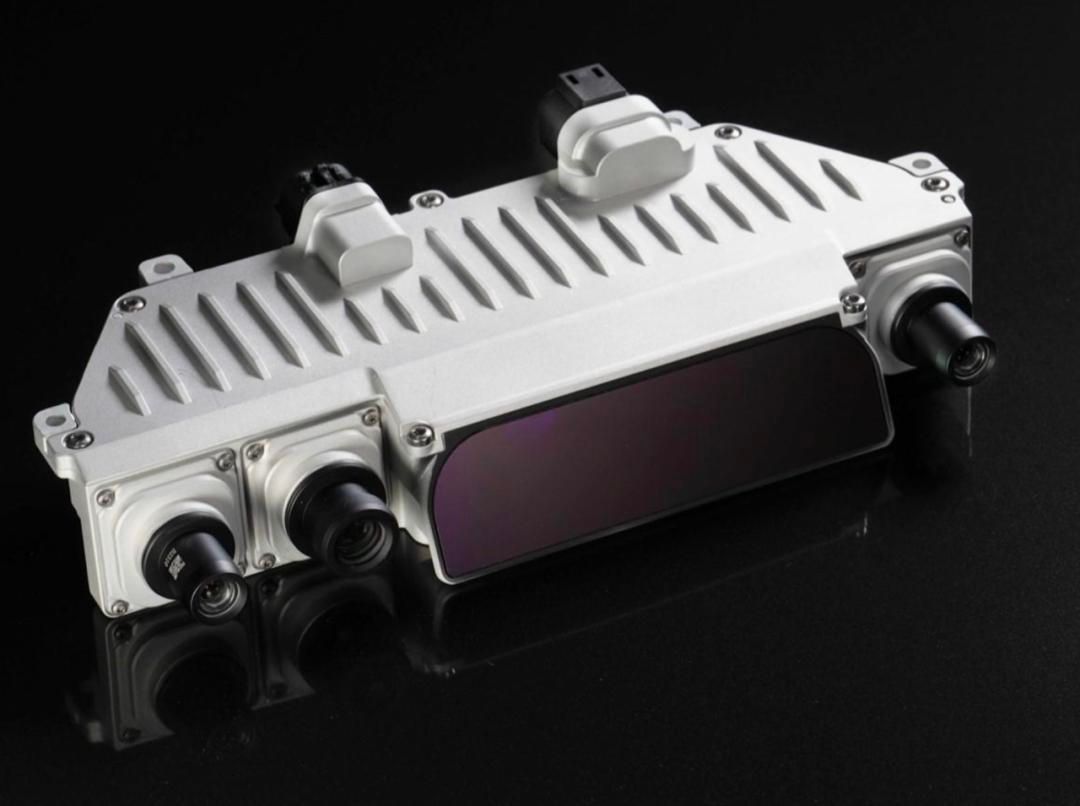
此外,大疆车载还发布了「惯导三目及激光雷达总成」技术,简称「激目」。
沈劭劼认为,在「成行平台」现有多阶梯方案推动下,高阶智能驾驶的标配趋势将会在未来三年内形成在30万内市场全面覆盖的新格局:

- 入门级的7V+32TOPS配置,从今年开始将慢慢实现8 - 15万级别车型的标配;
- 通过极致压榨硬件性能和算法优化,在100TOPS算力内实现的“无图”城市领航L2+智能驾驶功能,技术将逐渐普及至15万元级别及以上的各类车型;
- 激目系统将在2025年开始上车,在2026年左右与L3异构域控制器组合配置,有望把L3等级自动驾驶能力下放至25万左右级别的车型上。
与其它智能驾驶方案供应商相比,大疆有诸多不同之处。
大疆车载对于智驾芯片的选择以及工程化落地颇具特点,这家公司绕开了地平线、英伟达等主流芯片,而是基于TI、高通等进行算法开发,主打一个性价比,并且基本上做到行业首发。
在通往高阶智驾的路上,大疆车载虽然也引入了激光雷达,但并非像主流方案那样直接采购市场上的激光雷达产品,而是将自研触角伸入激光雷达硬件,这可以理解为对传感器的另一种压榨。
「之所以加入激光雷达,原因包括要解决视觉对于车向估计不精准的问题,以及提升智能驾驶体验、提升在极端Corner Case下的安全性等问题。」沈劭劼接受媒体专访中解释。
沈劭劼打了一个比方,做高性价比方案犹如在西瓜上雕了一个树林,难度可想而知,之所以持续突破,是由于大疆车载的工程能力和背后的企业文化共同驱动的。
从国内主流车企的规划看,今年会是高速NOA集中落地的节点,紧接着城市NOA大概率会在两到三年内进一步普及。大疆车载预计,今年将会有20多款搭载其系统的车型上市,覆盖电车、燃油,实现智驾平权、油电同智。
以下是沈劭劼今日在与包括HiEV在内的媒体的沟通记录,我们做了一些不改变原意的删减:
一、极致性价比,如何在「西瓜上雕树林」?
Q:基于高通的芯片去做方案有什么难点?对端到端的态度是怎样的?
沈劭劼:之前我们的7V + 32TOPS成行平台基础版方案是用的TDA4 VH,是TDA4 VH的全球首发。当时我们其实成功做到了芯片量产、智驾系统量产和车型量产三个事情在同一个时候进行,这应该在业界里面是比较少有的。
在高通上可能不会这么极端的三个东西同时量产,但是也会比较快。大疆比较乐意去做第一个吃螃蟹的,去把相关的技术落地。这其实跟高通的芯片、供应链这些没有关系,纯粹是我们自己比较热衷于去做第一个吃螃蟹的,用这些好的芯片、好的技术而已。
Q:跟华为或其他企业相比,大疆是怎么能做到这个高性价比的,优势是什么?大疆车载独立一年以来,您对业务等各方面的进展有什么样的评价?就是今年的主要目标是什么?
沈劭劼:高性价比这个事,是从我们自己的企业使命导出来的。一个企业总是会需要看自己到底擅长些什么东西,这些企业文化更容易做成一些什么东西,以及资源去决定到底选择哪的方向。
实话实说,高性价比的方案是非常难开发的。像7V纯视觉,这个背后的难度可想而知,当然这个前向我们也是比较独特的的惯导双目技术,从而解决了很多城市一直比较难解决的测绘相关的问题。
背后不单只是一个说我选了哪个芯片,选了什么传感器,它是一种企业文化和工程师理念的问题。
在大疆车载,对于能够把工程做好,能够用很受限的资源去做成非常厉害事情的工程师,我们是非常推崇的。推崇指的是从绩效考核、晋升方方面面,整个组织文化给他们足够多的支持,但是同时也鼓励他们去做更前沿的研究,然后从而让各人都有发挥空间。
工程能力和数理基础,两头一起碰撞就碰出来了一个比较独特的文化。在这个文化里面,其实这些工程师就会觉得做高性价比是一个符合公司使命,也是符合他自己的使命愿景的事情,之前其实有人说大疆非常擅长芝麻上雕花,我想说这个芝麻上雕花其实有时候又不太合适,为什么呢?这个芝麻太小了,花也太小了,但是这个比例我心领了。
可能更多的是在西瓜上雕一个树林,这是企业文化积累出来的东西。我觉得其实为什么能做成高性价比,工程能力以及支撑工程能力背后的企业文化才是最关键的事情。
Q:大疆车载在20万以上的高端市场有一个怎么样的思考和布局?这次要发的激光雷高阶方案,里面的激光雷达是自研吗?
沈绍劼:关于20万以上这个事情,我们最开始有点想从下往上打。
我自己是做移动机器人出身的,所有做机器人的人都会有一个梦想,都希望做这种全自动的产品。L4的Robotaxi我们想不想做?有这个能力的车,我们肯定是想做,只是我们不会去碰Robotaxi这个运营模式而已。任何事情不会阻挡我们在基本盘守住的情况下,不断地去尝试,去做更厉害的技术,更厉害的产品。
对于激光雷达,我们的思路其实并不是跟速腾聚创、禾赛一样,又做了一个激光雷达,这样没有竞争力的。我们对这个东西的思考是,如果有一个额外的传感器信息源,它怎么让整个系统的效能达到最大化?标定有没有办法更好地解决?清洁问题有没有办法更好地解决?原来的激光雷达有没有一些性能上的过设计?如果这个设计去掉,可不可以让它便宜一点,甚至便宜到一个可能跟视觉的只要等级差不多的程度?
二、大疆的「激目」路线:纯视觉与激光雷达并行
Q:在做性价比的同时,大家也会很关注一些极端情况下的影响,激光雷达可能是为了弥补这一方面。
沈绍劼:首先,纯视觉系统的确是有一定的局限性,但是这个局限性其实远远没有大家想象中那么大。
没有光的时候车是有车灯的,怕啥呢?没有光的时候、下雨的时候,大部分大雾的时候,其实视觉是能够处理的,真的这个局限性没有大家想象中那么大,特别是到了双目之后,即使前面的这个图像的确实不是太好,只要点云能出来,深度能出来,很多安全性的兜底就能做得到。这并不意味着抗拒别的传感器。
对于激光雷达有什么用,我们也有很多思考,双目本身有点云,激光雷达也有点云,视觉的密度比激光雷达的还高。但是双目的点云是越远越差的,有时候在深度断层上面会有一些拖影,这对检测车辆行为没什么影响,但是比如说朝向的估计、精确驾驶意图的估计会带来一些影响。我们额外加入一个激光雷达,是为了解决这些问题。
经过比较深入的场景分析之后,如何用一个更高精度的点云把车辆的意图估得更准,这是我们会做这个集成式激光雷达其中一个原因。
肯定也会有安全性的原因,在某一些极端Corner Case下的确是会有增加安全性的。
总体来说,它看起来是增加一个激光雷达,但背后肯定不只是加一个冗余,其实真的是一个个案例去分析,里面既有安全的,也有性能向的,也有体验向的,体验向的东西好像还更多一点。
三、今年将有20多款车上市,如何让车企拥有「灵魂」?
Q:大疆车载和五菱等都有比较深度的合作,合作模式可否介绍一下?
沈绍劼:先补充一下前面的问题,独立经营之后我们发展挺好的,今年大概会有20多款使用大疆车载系统的车型上市,这里面有电车、燃油车,这个我觉得应该是业界里比较少见,油电同智。
我们跟车企合作,更多秉承的是如何让车企以尽量低的代价,包括BOM的成本,也包括开发的代价,来获得他所想要的智能驾驶的产品的思路。

具体的展开其实是比较灵活的。
我们既有全栈式的交付,就是全栈到所有的传感器、加域控、再加软件,全部都是我们交付,也会有包括双目+域控,再集成额外其他传感器的一种,就半全栈交付;也会有我们把软件写在别人家的域控上面,然后再进行功能落地的交付方式。至还有一些更深入的,更像之前大家可能比较谈到的这种交不交出灵魂这类型的合作方式也有。

关键还是能不能多快好省的把这个车给交付出去。
然后我们其实也会出现那种在某些车型、同一个企业、某一个车型上去进行全量交付,同时去展开一些更深入、可能耗时时间更长的向车企研发赋能性质的合作。
Q:最近两年我们能明显看到一个趋势,像英伟达、地平线这种原来做智能驾驶车端推理芯片的公司,在逐渐地涉足软件。你怎么看待这种现象?另外就是有业内的人士评价说,这两家厂商基于自己的硬件和工具链来做算法,具备一定的优势,在您看来这种优势如果真的存在的话,有多大?
沈绍劼:大家都是想为自己的伙伴多快好省地把东西交出去。如果本来软件能力就很强,做多一点点又能够让客户变得更好,那为啥不试一下?
我们自己其实也会经常去想这个问题,擅长和不擅长什么。我们自己其实一直在往传感器的某个方向去拱,但是我们从来没有往芯片这个方向去拱。很明显这是从我们自己懂啥、不懂啥,以及手头的资源这么去做出的这个决定的。
我觉得做智能驾驶有四座大山,芯片算力、传感器、软件算法、数据闭环能力。这四座大山其实准确来说应该这四座大山都得跨过去,它能做好,但是其实每家公司有自己擅长的不一样的东西。
这篇关于专访沈劭劼:7千元干出城市NOA,大疆车载如何在「西瓜上雕树林」?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!