本文主要是介绍IJCAI23 - Continual Learning Tutorial,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
如果你对这篇文章感兴趣,可以点击「【访客必读 - 指引页】一文囊括主页内所有高质量博客」,查看完整博客分类与对应链接。
本篇 Tutorial 主要介绍了 CL 中的一些基本概念以及一些过往的方法。
Problem Definition
Continual Learning 和 Incremental learning 以及 Lifelong learning 属于同一概念, 其所关心的场景均为「如何在新数据持续到来的情况下更新模型?」;并且由于存储空间和隐私问题,流式数据通常不能被存储。
CL 的整体目标为最小化所有已见任务的期望损失,如下所示:

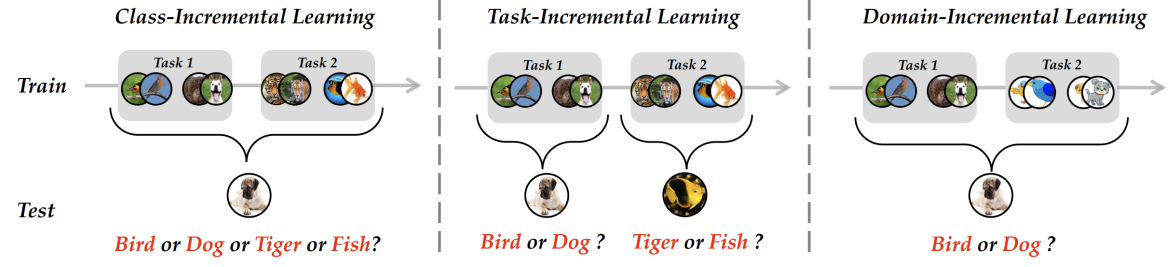
CL 又细分为三类( { Y t } \{\mathcal{Y}^t\} {Yt} 表示 t t t 时刻的类别标签集合, P ( Y t ) P(\mathcal{Y}^t) P(Yt) 表示类别分布, P ( X t ) P(\mathcal{X}^t) P(Xt) 表示输入数据分布):
- Class-Incremental Learning (CIL): { Y t } ⊂ { Y t + 1 } , P ( Y t ) ≠ P ( Y t + 1 ) , P ( X t ) ≠ P ( X t + 1 ) \left\{\mathcal{Y}^t\right\} \subset\left\{\mathcal{Y}^{t+1}\right\},P\left(\mathcal{Y}^t\right) \neq P\left(\mathcal{Y}^{t+1}\right),P\left(\mathcal{X}^t\right) \neq P\left(\mathcal{X}^{t+1}\right) {Yt}⊂{Yt+1},P(Yt)=P(Yt+1),P(Xt)=P(Xt+1)
- Task-Incremental Learning (TIL): { Y t } ≠ { Y t + 1 } , P ( X t ) ≠ P ( X t + 1 ) \left\{\mathcal{Y}^t\right\} \neq\left\{\mathcal{Y}^{t+1}\right\},P\left(\mathcal{X}^t\right) \neq P\left(\mathcal{X}^{t+1}\right) {Yt}={Yt+1},P(Xt)=P(Xt+1),测试时任务 id ( t ) \text{id}(t) id(t) 已知
- Domain-Incremental Learning (DIL): { Y t } = { Y t + 1 } , P ( Y t ) = P ( Y t + 1 ) , P ( X t ) ≠ P ( X t + 1 ) \left\{\mathcal{Y}^t\right\} =\left\{\mathcal{Y}^{t+1}\right\},P\left(\mathcal{Y}^t\right) =P\left(\mathcal{Y}^{t+1}\right),P\left(\mathcal{X}^t\right) \neq P\left(\mathcal{X}^{t+1}\right) {Yt}={Yt+1},P(Yt)=P(Yt+1),P(Xt)=P(Xt+1)
与其它相关领域的区别
Multi-task Learning:(1)同时拿到所有任务的数据;(2)离线训练

Transfer Learning:(1)只有两个阶段;(2)并且不关注第一阶段,即 Source 的性能

Meta-Learning:(1)离线训练;(2)不关心 meta-train 的性能

CL 的一些传统做法
具体方法分类如下:

Data-Centric Methods
核心思想:保存一部分先前数据,在面对新任务时,可以作为训练损失的正则项 (hosting the data to replay former knowledge when learning new, or exert regularization terms with former data)
保存一部分数据的过往方法:
- [Welling ICML’09] 计算 Embedding 空间的类中心,选取离类中心近的样本。
- [Rebuffi et al. CVPR’17] 每个类依次贪心选取样本,使得样本 Embedding 均值逼近类中心。
- [Shin et al. NIPS’17] [Gao and Liu ICML’23] 使用生成式模型学习每个类的数据分布。
将先前数据作为新任务训练损失正则项的一些方法:
- [Lopez-Paz and Ranzato NIPS’17] 训练时要求模型不仅在新任务上做好,在旧任务上也要做的比之前好;模型在新任务和旧任务上的损失梯度夹角为正。
一些可能的问题:
- [Verwimp et al. ICCV’21] Data replay 可能会遭遇 overfitting.
- [Wu NeurIPS’18] 生成式模型也会出现灾难性遗忘。
Model-Centric Methods
核心思想:调整网络结构,或者识别网络中的重要参数并限制其变化
- [Kirkpatrick et al. PNAS’17] 训练新任务时,限制模型参数的变化,越重要的参数权重越高
Algorithm-Centric Methods
核心思想:设计一些训练机制避免旧模型的遗忘 (design training mechanisms to prevent the forgetting of old model)
知识蒸馏 (Knowledge Distillation) 的相关方法:
- [Li et al. TPAMI’17] 将旧模型作为 Teacher,训练时模型不仅要做好当前任务,在过去任务上需要表现得和 Teacher 尽可能相近。
模型纠正 (Model Rectify) 的相关方法:
- 例如「降低新类输出概率 Logit」和「降低最后一层新类的权重矩阵」。
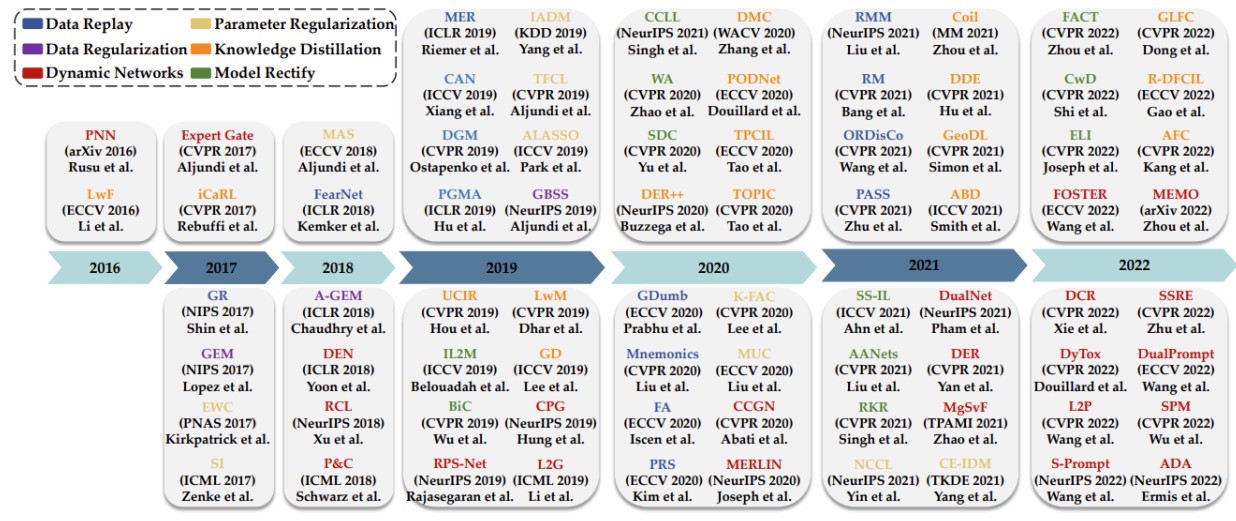
Trends of CL
最后是 CL 近几年的整体发展趋势:
参考资料
- IJCAI23 - Continual Learning Tutorial
- PyCIL - A Python Toolbox for Class-Incremental Learning
这篇关于IJCAI23 - Continual Learning Tutorial的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









