本文主要是介绍【无人机】【2018.05】小型无人机未来颤振试验纵向模型的研制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文为美国安柏瑞德航空大学(作者:Said S. Hamada)的硕士论文,共88页。
本文介绍了一种具有柔性特性的小型无人机纵向运动的系统辨识方法。研究的无人机是一种对动力学模型知识有限的货架飞机产品,获得颤振试验模型的首要任务是确定刚体模型。具体来说,本文将重点研究无人机的研制和纵向刚体模型的建立。这涉及到航空电子设备和传感器的组装和配置,进行实验以确定质量和惯性特性,并使用用于空气动力学分析的软件工具来获得静态和动态稳定性导数的初步值。下一步是为系统辨识设计飞行实验。系统辨识的重点是获取纵向模型,并利用现有的软件工具进行比较。利用参数识别库对最佳模型进行了识别,该库给出了双峰响应的俯仰角速度与垂直加速度飞行数据的匹配率分别为65%和70%。短周期模式的频率为6.01 rad/s,阻尼比为0.977。
This thesis presents the systemidentification of the longitudinal motion of a small unmanned aerial vehiclewith flexible characteristics. The unmanned aerial vehicle of study is anoff-the-shelf aircraft with limited knowledge about the dynamic model. Thefirst task in obtaining a model for flutter testing is determining the rigidbody model. Specifically, this thesis will focus in the development of theaircraft and obtaining the longitudinal rigid body model. This involves theassembly and configuration of the avionics and sensors, performing experimentsto determine mass and inertia properties and using software tools for aerodynamicanalysis to get preliminary values for the static and dynamic stabilityderivatives. The next step was to design flight experiments for the purpose ofsystem identification. The system identification focused on obtaining thelongitudinal model and available software tools were used to get comparativeresults. The best model was identified using the parameter identification librarywhich gave a 65% match in the pitch rate and 70% match in the verticalacceleration flight data from a doublet response. The short period mode wasidentified to have a frequency of 6.01 rad/s and a damping ratio of 0.977.
1 引言
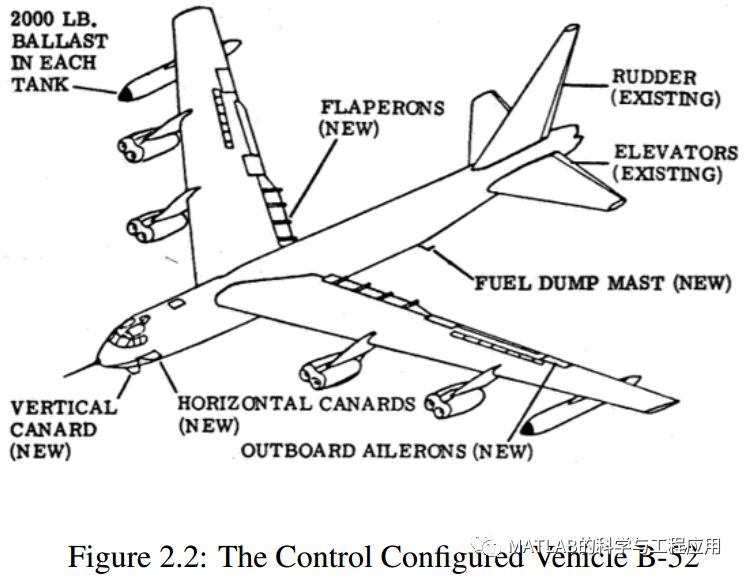
2 项目背景
3 飞行测试平台
4 飞行动态模型
5 纵向动力学系统辨识
6 结论与未来工作展望
完整资料领取请加QQ群免费下载:
这篇关于【无人机】【2018.05】小型无人机未来颤振试验纵向模型的研制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








