本文主要是介绍SINAMICS V90 PN 指导手册 第7章 旋转方向 300%过载 停车方式,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
电机旋转方向
关于电机旋转方向的调整,可以通过调整参数p29001完成,默认p29001=0为正转,p29001=1为反转

小结:
- 调节p29001参数改变电机旋转方向
300%过载能力
SINAMICS V90 驱动可以在300%过载的情况下工作,时间占空比如下图

200V系列伺服驱动300%过载能力
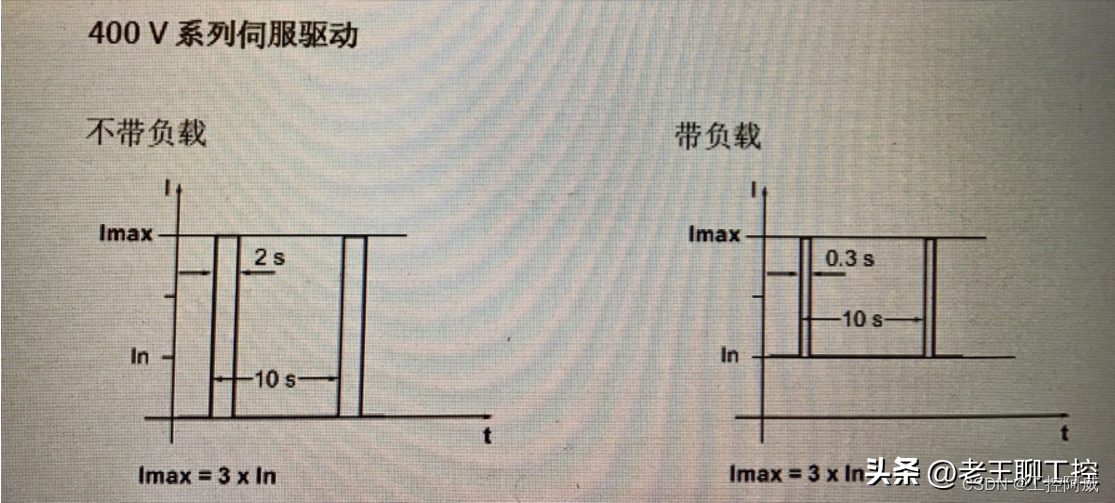
400V系列伺服驱动300%过载能力
小结:
- 200V系列伺服驱动300%过载能力是:空载时,10s占空比,过载时间1.4s;带载时,10s占空比,过载时间0.3s。
- 400V系列伺服驱动300%过载能力是:空载时,10s占空比,过载时间2s;带载时,10s占空比,过载时间0.3s。
伺服关闭时停车方式
伺服“伺服关闭”状态时可以选择一种停车方式,通常有3种停车方式,分别如下:
- 斜坡下降(OFF1)
- 自由停车(OFF2)
- 快速停止(OFF3)
斜坡下降(OFF1)
PROFINET控制室字STW1.0和STW1.1可设置斜坡下降和自由停车方式:
斜坡下降OFF1
STW1.0可用于控制电机的启停
自由停车(OFF2)

自由停车(OFF2)
快速停车(OFF3)
可通过PROFINET 控制字STW1.2或数字量输入信号EMGS可设置快速停车

关于PROFINET控制字以及数字量输入信号EMGS,信息如下:
V90 PN可以将信号自由分配给以下数字量输入/输出端:
DI1至DI4可通过参数p29301至p29304分配
默认设置如下:

DI分配默认值
所选DI信号会在8ms至16ms延时范围内作出响应
SINAMICS V90 PN伺服驱动可使用七个内部数字量输入信号
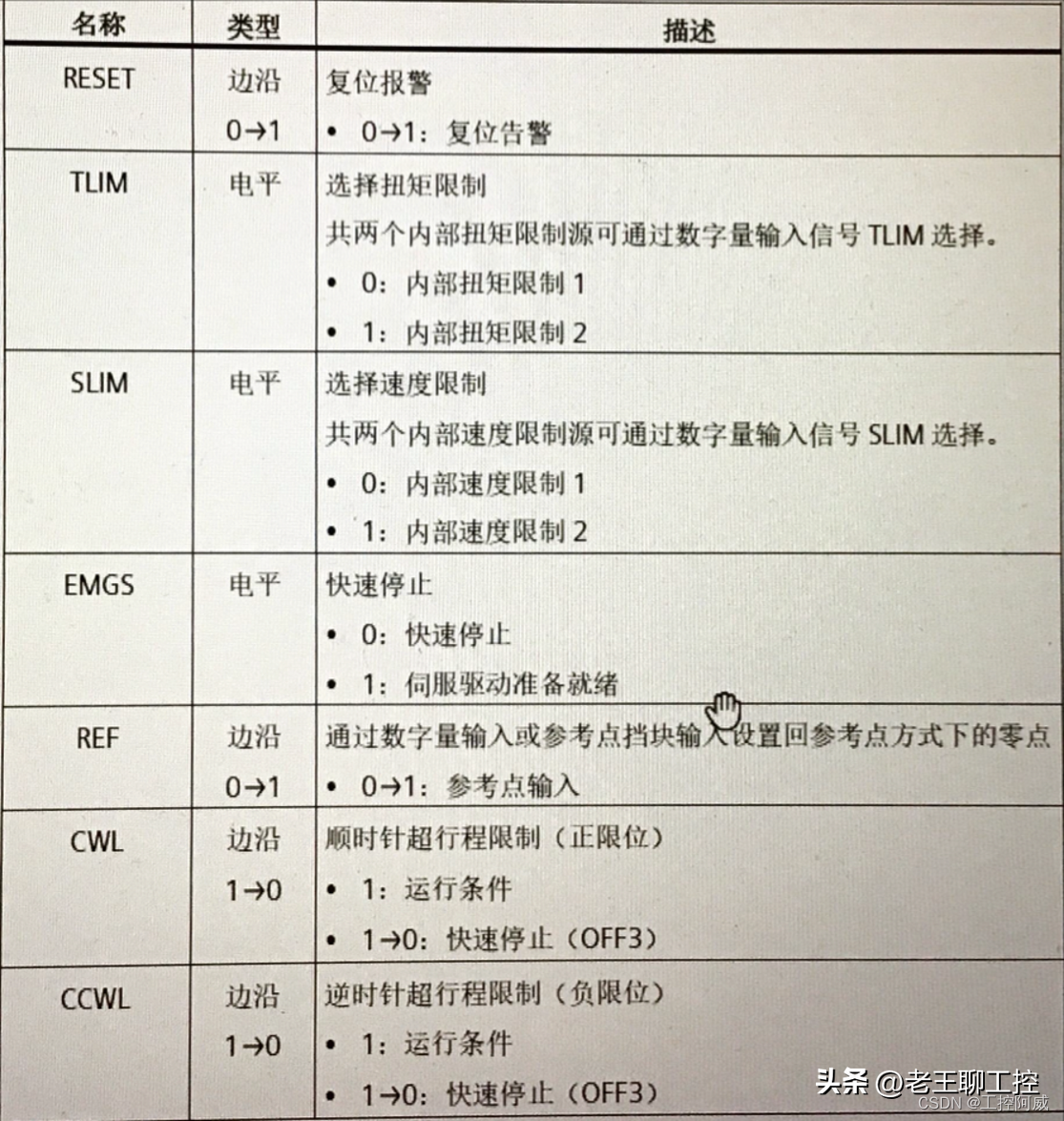
DI可定义的数字量输入信号
小结:几种停车方式可根据使用场景使用,若使用V90本身的IO信号接口接入数字量输入,其响应时间是8ms到16ms
END
这篇关于SINAMICS V90 PN 指导手册 第7章 旋转方向 300%过载 停车方式的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








