本文主要是介绍yolov8涨点技巧,添加SwinTransformer注意力机制,提升目标检测效果,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
摘要
SwinTransformer原理
代码实现
YOLOv8详细添加步骤
ymal文件内容
one_swinTrans
three_swinTrans
启动命令
完整代码分享
摘要
Swin Transformer通过引入创新的分层注意力机制展现了其架构的独特性,该机制通过将注意力区域划分为块并在这些块内执行操作,从而有效降低了计算复杂性。其主要结构呈现分层形式,每个阶段包括一组基础块,负责捕捉不同层次的特征表示,形成了分层的特征提取过程。采用多尺度的注意力机制使得模型能够同时关注不同大小的特征,从而提高对图像中不同尺度信息的感知。在多个图像分类基准数据集上,Swin Transformer表现出与其他先进模型相媲美甚至更优的性能,且在相对较少的参数和计算成本下取得出色的结果。其模块化设计使得它在目标检测和语义分割等其他计算机视觉任务上也具备良好的通用性。
SwinTransformer原理
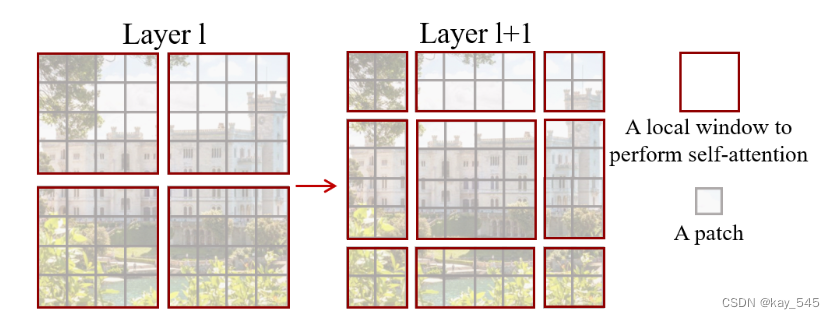
Swin Transformer 的一个关键设计元素是连续自注意力层之间窗口分区的移动,如图所示。移动的窗口桥接了前一层的窗口,提供了它们之间的连接,从而显着增强了建模能力。这种策略在现实世界的延迟方面也很有效:窗口内的所有查询补丁共享相同的密钥,这有利于硬件中的内存访问。相比之下,早期基于滑动窗口的自注意力方法 由于不同查询像素的键集不同,因此在通用硬件上延迟较低。
下图概述了 Swin Transformer 架构,其中展示了微型版本 。它首先通过补丁分割模块(如 ViT)将输入 RGB 图像分割成不重叠的补丁。每个补丁都被视为一个“token”,其特征被设置为原始像素 RGB 值的串联。在我们的实现中,我们使用 4 × 4 的 patch 大小,因此每个 patch 的特征维度为 4 × 4 × 3 = 48。线性嵌入层应用于此原始值特征,将其投影到任意维度(记为C)
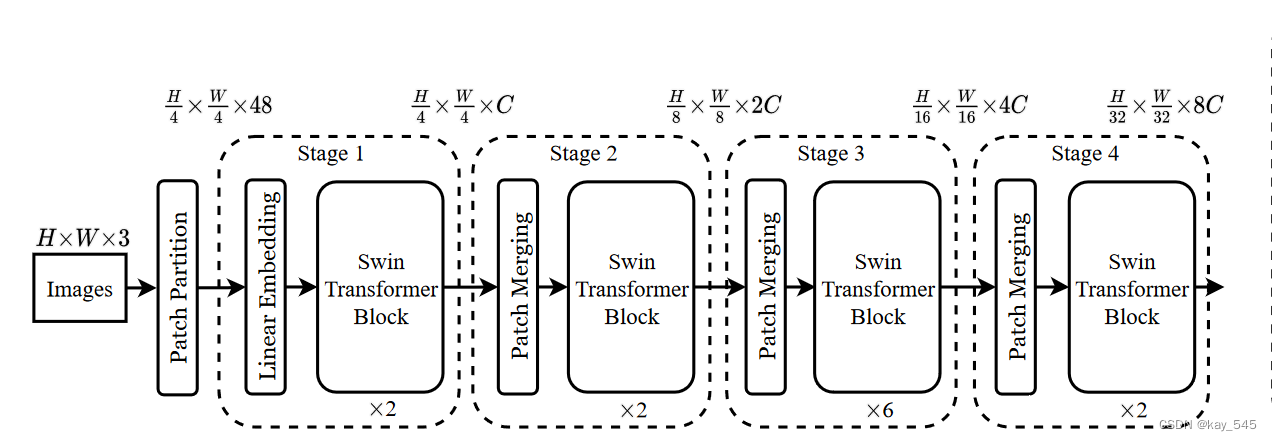
在这些补丁token上应用了几个经过修改的自注意力计算的 Transformer 块(Swin Transformer 块)。 Transformer 块维护tokens数量 ( H/4 ×W/4 ),与线性嵌入一起被称为“阶段 1”
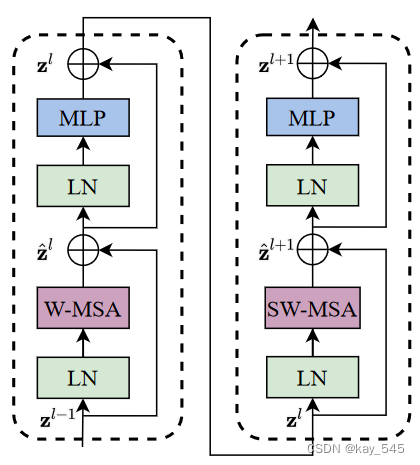
Swin Transformer 是通过将 Transformer 块中的标准多头自注意力(MSA)模块替换为基于移位窗口的模块而构建的,其他层保持不变。如上图所示,Swin Transformer 模块由基于移位窗口的 MSA 模块组成,后跟中间带有 GELU 非线性的 2 层 MLP。在每个 MSA 模块和每个 MLP 之前应用 LayerNorm (LN) 层,并在每个模块之后应用残差连接。
代码实现
class WindowAttention(nn.Module):def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dimself.window_size = window_size # Wh, Wwself.num_heads = num_headshead_dim = dim // num_headsself.scale = qk_scale or head_dim ** -0.5# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH# get pair-wise relative position index for each token inside the windowcoords_h = torch.arange(self.window_size[0])coords_w = torch.arange(self.window_size[1])coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Wwcoords_flatten = torch.flatten(coords, 1) # 2, Wh*Wwrelative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Wwrelative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0relative_coords[:, :, 1] += self.window_size[1] - 1relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Wwself.register_buffer("relative_position_index", relative_position_index)self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)nn.init.normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)def forward(self, x, mask=None):B_, N, C = x.shapeqkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)q = q * self.scaleattn = (q @ k.transpose(-2, -1))relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nHrelative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Wwattn = attn + relative_position_bias.unsqueeze(0)if mask is not None:nW = mask.shape[0]attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)attn = attn.view(-1, self.num_heads, N, N)attn = self.softmax(attn)else:attn = self.softmax(attn)attn = self.attn_drop(attn)# print(attn.dtype, v.dtype)try:x = (attn @ v).transpose(1, 2).reshape(B_, N, C)except:# print(attn.dtype, v.dtype)x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C)x = self.proj(x)x = self.proj_drop(x)return xclass SwinTransformer(nn.Module):# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworksdef __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansionsuper(SwinTransformer, self).__init__()c_ = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c1, c_, 1, 1)self.cv3 = Conv(2 * c_, c2, 1, 1)num_heads = c_ // 32self.m = SwinTransformerBlock(c_, c_, num_heads, n)# self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])def forward(self, x):y1 = self.m(self.cv1(x))y2 = self.cv2(x)return self.cv3(torch.cat((y1, y2), dim=1))class SwinTransformerB(nn.Module):# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworksdef __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansionsuper(Swin_Transformer_B, self).__init__()c_ = int(c2) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c_, c_, 1, 1)self.cv3 = Conv(2 * c_, c2, 1, 1)num_heads = c_ // 32self.m = SwinTransformerBlock(c_, c_, num_heads, n)# self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])def forward(self, x):x1 = self.cv1(x)y1 = self.m(x1)y2 = self.cv2(x1)return self.cv3(torch.cat((y1, y2), dim=1))class SwinTransformerC(nn.Module):# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworksdef __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansionsuper(Swin_Transformer_C, self).__init__()c_ = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c1, c_, 1, 1)self.cv3 = Conv(c_, c_, 1, 1)self.cv4 = Conv(2 * c_, c2, 1, 1)num_heads = c_ // 32self.m = SwinTransformerBlock(c_, c_, num_heads, n)# self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])def forward(self, x):y1 = self.cv3(self.m(self.cv1(x)))y2 = self.cv2(x)return self.cv4(torch.cat((y1, y2), dim=1))class Mlp(nn.Module):def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Linear(in_features, hidden_features)self.act = act_layer()self.fc2 = nn.Linear(hidden_features, out_features)self.drop = nn.Dropout(drop)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return xdef window_partition(x, window_size):B, H, W, C = x.shapeassert H % window_size == 0, 'feature map h and w can not divide by window size'x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)return windowsdef window_reverse(windows, window_size, H, W):B = int(windows.shape[0] / (H * W / window_size / window_size))x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)return xclass SwinTransformerLayer(nn.Module):def __init__(self, dim, num_heads, window_size=8, shift_size=0,mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,act_layer=nn.SiLU, norm_layer=nn.LayerNorm):super().__init__()self.dim = dimself.num_heads = num_headsself.window_size = window_sizeself.shift_size = shift_sizeself.mlp_ratio = mlp_ratio# if min(self.input_resolution) <= self.window_size:# # if window size is larger than input resolution, we don't partition windows# self.shift_size = 0# self.window_size = min(self.input_resolution)assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"self.norm1 = norm_layer(dim)self.attn = WindowAttention(dim, window_size=(self.window_size, self.window_size), num_heads=num_heads,qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)def create_mask(self, H, W):# calculate attention mask for SW-MSAimg_mask = torch.zeros((1, H, W, 1)) # 1 H W 1h_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))w_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))cnt = 0for h in h_slices:for w in w_slices:img_mask[:, h, w, :] = cntcnt += 1mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1mask_windows = mask_windows.view(-1, self.window_size * self.window_size)attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))return attn_maskdef forward(self, x):# reshape x[b c h w] to x[b l c]_, _, H_, W_ = x.shapePadding = Falseif min(H_, W_) < self.window_size or H_ % self.window_size != 0 or W_ % self.window_size != 0:Padding = True# print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.')pad_r = (self.window_size - W_ % self.window_size) % self.window_sizepad_b = (self.window_size - H_ % self.window_size) % self.window_sizex = F.pad(x, (0, pad_r, 0, pad_b))# print('2', x.shape)B, C, H, W = x.shapeL = H * Wx = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c# create mask from init to forwardif self.shift_size > 0:attn_mask = self.create_mask(H, W).to(x.device)else:attn_mask = Noneshortcut = xx = self.norm1(x)x = x.view(B, H, W, C)# cyclic shiftif self.shift_size > 0:shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))else:shifted_x = x# partition windowsx_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, Cx_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C# W-MSA/SW-MSAattn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C# reverse cyclic shiftif self.shift_size > 0:x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))else:x = shifted_xx = x.view(B, H * W, C)# FFNx = shortcut + self.drop_path(x)x = x + self.drop_path(self.mlp(self.norm2(x)))x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h wif Padding:x = x[:, :, :H_, :W_] # reverse paddingreturn xclass SwinTransformerBlock(nn.Module):def __init__(self, c1, c2, num_heads, num_layers, window_size=8):super().__init__()self.conv = Noneif c1 != c2:self.conv = Conv(c1, c2)# remove input_resolutionself.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size,shift_size=0 if (i % 2 == 0) else window_size // 2) for i inrange(num_layers)])def forward(self, x):if self.conv is not None:x = self.conv(x)x = self.blocks(x)return xYOLOv8详细添加步骤
1. 复制以上代码在 ultralytics/nn/modules/conv.py 添加
2. 在ultralytics/nn/modules/init.py 注册SwinTransformer
3. 在ultralytics/nn/task.py 注册SwinTransformer(两处注册)
4. 成功添加SwinTransformer
ymal文件内容
one_swinTrans
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 6 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, SwinTransformer, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, C2f, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, C2f, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 21 (P5/32-large)- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)three_swinTrans
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 6 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, SwinTransformer, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, SwinTransformer, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, SwinTransformer, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 21 (P5/32-large)- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
启动命令
from ultralytics import YOLO# Load a model
# model = YOLO('yolov8s.yaml') # build a new model from YAML
model = YOLO('/ultralytics/cfg/models/v8/yolov8_swinTrans.yaml') # load a pretrained model (recommended for training)
# model = YOLO('yolov8s.yaml').load('yolov8s.pt') # build from YAML and transfer weights# Train the model
if __name__ == '__main__':model.train( )
完整代码分享
https://download.csdn.net/download/m0_67647321/88890624

这篇关于yolov8涨点技巧,添加SwinTransformer注意力机制,提升目标检测效果的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








