本文主要是介绍机器人内部传感器阅读笔记及心得-位置传感器-旋转变压器、激光干涉式编码器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
旋转变压器
旋转变压器是一种输出电压随转角变化的检测装置,是用来检测角位移的,其基本结构与交流绕线式异步电动机相似,由定子和转子组成。
旋转变压器的原理如图1所示,定子相当于变压器的一次侧,有两组在空间位置上互相垂直的励磁绕组;转子相当于变压器的二次侧,仅有一个绕组。当定子绕组通交流电流时,转子绕组中便有感应电动势产生。感应电动势的大小等于两个定子绕组单独作用时所产生的感应电动势矢量和。
旋转变压器是一种交流励磁型的角度检测器,检测精度较高。在使用时,可以把旋转变压器转子与机器人的关节轴联接,用鉴相器测出转子感应电动势的相位,从而确定关节轴旋转的角度。
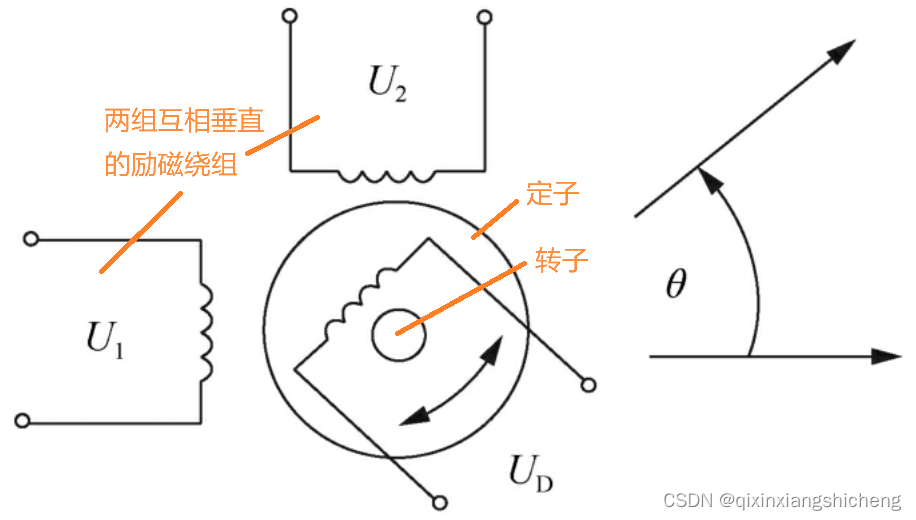
图1 旋转变压器的原理
激光干涉式编码器
国内最高水平的高密度光栅盘,刻线密度达到380线/mm。1994年研制成的ϕ58mm带有光学倍频的编码器,无电细分的原始角分辨率达到每圈162000脉冲,即优于2^n。高速电处理技术的应用,使响应频率达到1MHz。绝对零位信息提取的创新技术使定位精度大大提高,全周最大累积误差为7.8′′。该编码器可用于高精度DD机器人,使我国机器人位置传感器的制造技术处于世界先进水平行列。
备注:1"=1英寸(inch)=2.54厘米
DD:Direct Drive,直接驱动
这篇关于机器人内部传感器阅读笔记及心得-位置传感器-旋转变压器、激光干涉式编码器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








