本文主要是介绍CASAIM与中山大学在汽车抬头显示器HUD光学设计达成科研合作,高精度三维扫描及逆向建模汽车挡风玻璃辅助光学设计验证,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
近期,中科院广州电子科教与智能制造部(CASAIM)和中山大学围绕汽车抬头显示器光学设计课题研究展开合作,高精度三维扫描逆向建模汽车挡风玻璃辅助光学设计和验证,缩短汽车抬头显示器设计周期,加快课题研究项目进度。

中山大学由中华人民共和国教育部直属,是教育部、国家国防科技工业局和广东省共建的综合性全国重点大学,位列国家“双一流”、“985工程”、“211工程”。
汽车抬头显示器光学设计是中山大学重要的课题项目,汽车抬头显示器(HUD)由两个自由曲面反射镜以及挡风玻璃组成,能将车速、导航地图等信息投影到汽车前挡风玻璃的驾驶员平视范围内,驾驶员无需低头就可以看到这些信息,减少了因低头查看信息而导致交通事故的可能。

随着智能座舱的发展,抬头显示器(HUD)在汽车上使用越来越普遍,挡风玻璃作为投影介质来反射成像,会直接影响到抬头显示器的显示效果,因此中科院广州电子科教与智能制造部(CASAIM)采用最新一代高精度三维扫描设备,使用高功率蓝光反射成像技术,可最大程度地确保挡风玻璃表面数据的扫描精度,获取挡风玻璃的多角度三维数据。
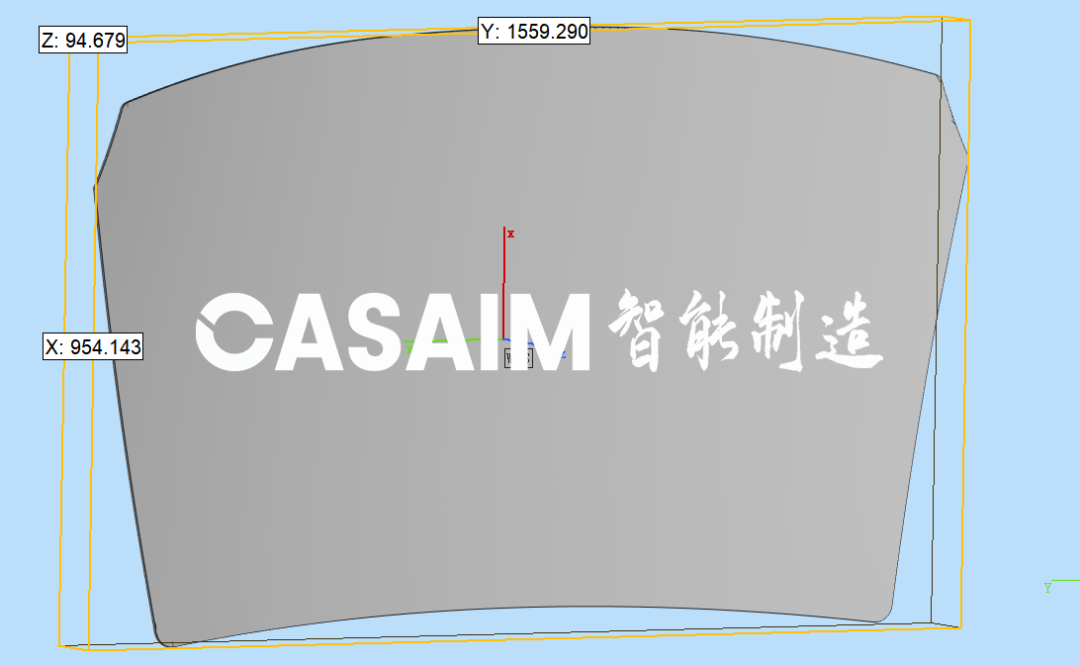
扫描汽车挡风玻璃来辅助光学设计和验证,对整个挡风玻璃进行三维逆向建模,有利于设计出合适的抬头显示器。中山大学课题组对于挡风玻璃数据获取的精度要求较高,对中科院广州电子科教与智能制造部(CASAIM)提供的挡风玻璃扫描精度与逆向结果表示满意,放映数据用得相对顺利。
中科院是中国科技创新战略力量,中科院广州电子科教与智能制造部(CASAIM)作为科教服务的先行者,始终以“科教兴国,教育先行”为使命,承担着多项国家、广东省、广州市重点攻关项目和国家自然科学基金项目,已为国内超过160所院校携手合作,如清华大学、中国民航大学、沈阳航空航天大学、哈尔滨工业大学,浙江大学,贵州大学,华南理工大学,深圳大学,广州技师学院等,推动教育科研成果转化。
这篇关于CASAIM与中山大学在汽车抬头显示器HUD光学设计达成科研合作,高精度三维扫描及逆向建模汽车挡风玻璃辅助光学设计验证的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







