本文主要是介绍VTK 三维场景的基本要素(相机) vtkCamera,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
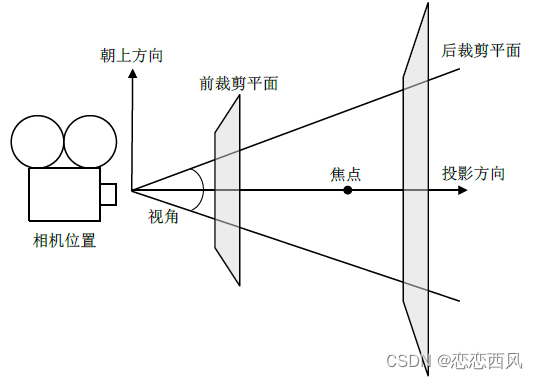
观众的眼睛好比三维渲染场景中的相机,在VTK中用vtkCamera类来表示。vtkCamera负责把三维场景投影到二维平面,如屏幕,相机投影示意图如下图所示。
1.与相机投影相关的要素主要有如下几个:
1)相机位置:
相机所处的位置,用vtkCamera::SetPosition()方法设置。
2)相机焦点:
用vtkCamera::SetFocusPoint()方法设置,默认的焦点位置在世界坐标系的原点。
3)朝上方向:
朝上方向即哪个方向为相机朝上的方向。就好比直立看东西,方向为头朝上,看到的东西也是直立的,如果倒立看某个东西,这时方向头朝下,看到的东西就是倒立的。相机位置、相机焦点和朝上方向三个因素确定了相机的实际方向,即确定相机的试图。
4)投影方向:
相机位置到相机焦点的向量方向即为投影方向。
5)投影方法: 该要素用于确定Actor是如何映射到像平面的。
vtkCamera定义了两种投影方法:
一种是正交投影(Orthographic Projection),也叫平行投影(Parallel Projection),即进入相机的光线与投影方向是平行的;
另一种是透视投影(Perspective Projection),即所有光线相较于一点。该投影方法最符合人类眼睛对于景物所产生的近大远小的视觉习惯。
6)视角:
透视投影时需要指定相机的视角(View Angle),默认的视角大小为30°,可以用vtkCamera::SetViewAngle()方法设置。
7)前后裁剪平面:
裁剪平面与投影方向相交,一般与投影方向也是垂直的。裁剪平面主要用于评估Actor与相机距离的远近,只有在前后裁剪平面之间的Actor才是可见的。裁剪平面的位置可以用vtkCamera::SetClippingRange()方法设置。
相机的视野范围是一个锥状体; 相机位置和焦点位置定义了相机的位置和投影方向,前裁剪平面与后裁剪平面 之间为可见区域;
相机坐标
相机所在的位置坐标;
void SetPosition(double x, double y, double z);void SetPosition(const double a[3]) { this->SetPosition(a[0], a[1], a[2]); }vtkGetVector3Macro(Position, double);相机焦点
相机焦点所在的位置坐标;
void SetFocalPoint(double x, double y, double z);void SetFocalPoint(const double a[3]) { this->SetFocalPoint(a[0], a[1], a[2]); }vtkGetVector3Macro(FocalPoint, double);通过设置相机焦点与相机坐标的距离,来移动焦点坐标,注意:设置的值必须为正值。
void SetDistance(double);
vtkGetMacro(Distance, double); 朝上方向
使用SetViewUp设置相机的朝上方向;
一般默认朝上方向是Y轴正向:(0,1,0);
修改相机的朝上方向,可以实现相机绕XYZ轴旋转的功能;
一般情况都是写0或者1,如果是斜着旋转,就要输入0-1范围内的小数,大家可以动手自己实验一下;
void SetViewUp(double vx, double vy, double vz);void SetViewUp(const double a[3]) { this->SetViewUp(a[0], a[1], a[2]); }vtkGetVector3Macro(ViewUp, double);投影方式
设置/获取ParallelProjection实例变量的值。
这决定了相机应该进行透视投影还是平行投影。
void SetParallelProjection(vtkTypeBool flag);vtkGetMacro(ParallelProjection, vtkTypeBool);vtkBooleanMacro(ParallelProjection, vtkTypeBool);投影方向
投影方向是指从相机位置到焦点方向的矢量。
double DirectionOfProjection[3];
vtkGetVector3Macro(DirectionOfProjection, double);这通常与ViewPlaneNormal相反,即垂直于屏幕的向量,除非视图是倾斜的。
旋转
void Roll(double angle):围绕投影方向旋转相机
void Azimuth(double angle); 以焦点为中心,围绕朝上方向方向向量,即在焦点为中心,焦距为半径的圆球的维度线上水平旋转;
void Elevation(double angle); 以焦点为中心,在焦点为中心,焦距为半径的圆球的经度线方向上旋转垂直旋转;
void Yaw(double angle); 同Azimuth相似,以相机为中心,移动焦点坐标;
void Pitch(double angle); 同Elevation相似,以相机为中心,移动焦点坐标;
调整裁剪平面距离
ClippingRange即剪切平面,分为前后两个。只有在这两个剪切平面之间的内容才会被渲染和显示。默认值是(0.1,1000)。这个量一般不需要修改,而是在vtkRenderer对象中调用ResetCameraClippingRange()方法来自动重设渲染范围。如果你的图像显示不完整,但是稍微用鼠标旋转或平移一下又变完整了。建议试一下调用一次这个方法。
设置前裁剪平面和后裁剪平面,前裁剪平面就是距离相机较近的平面,后平面就是距离相机较远位置;
dNear和dFar是距离相机坐标的距离,在相机坐标向焦点方向上的距离;
void SetClippingRange(double dNear, double dFar);
void SetClippingRange(const double a[2]) { this->SetClippingRange(a[0], a[1]); }
vtkGetVector2Macro(ClippingRange, double);重置相机参数
vtkRenderer类可以重置使用的相机参数;
virtual void ResetCamera();
根据可见的vtkActor自动设置相机参数。使得相机会重新定位以观察演员的中心点,并沿其初始视图平面法线移动(即,从镜头位置到焦点),这样所有的vtkActor都可以在相机中看到。
从源码中可以看到ResetCamera()只会重置相机的焦点焦距朝上方向等信息,不会重置旋转角度,如果要从一个Renderer中获取多个旋转后图像,需要对角度进行修正后计算,每次ResetCamera()都会保留上一次旋转的角度;
这篇关于VTK 三维场景的基本要素(相机) vtkCamera的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



