本文主要是介绍信号与槽是如何实现的_机器人信号与IO模块接口的对应,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
上一期关于快换系统接线中提到,E538、E540(机器人输入信号)了解VASS标准的都知道这两个信号含义。对于一些非标的配置我们应该如何查看输入输出端信号与I/O模块接口的匹配.
物理接口
以快换系统的准备好信号为例;
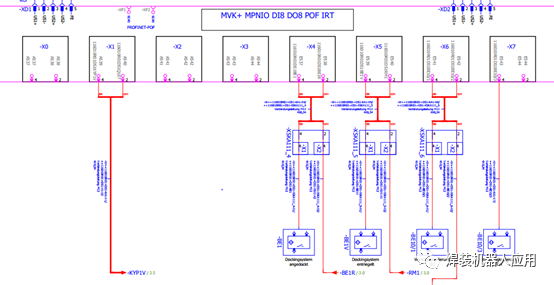
快换系统使用的I/O模块;DI8 DO8共16个信号,8个接口0-3为输出信号接口,4-7为输入信号接口。快换准备好信号的反馈信号线接到快换系统I/O模块的5号端口的第二个信号输入点。
图纸如图;
信号连接
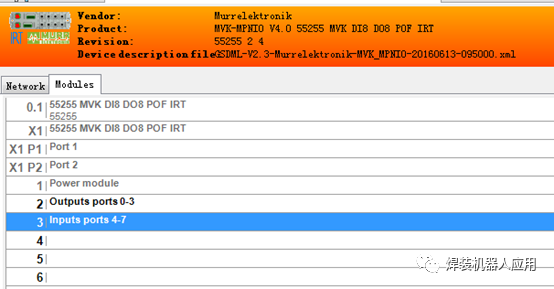
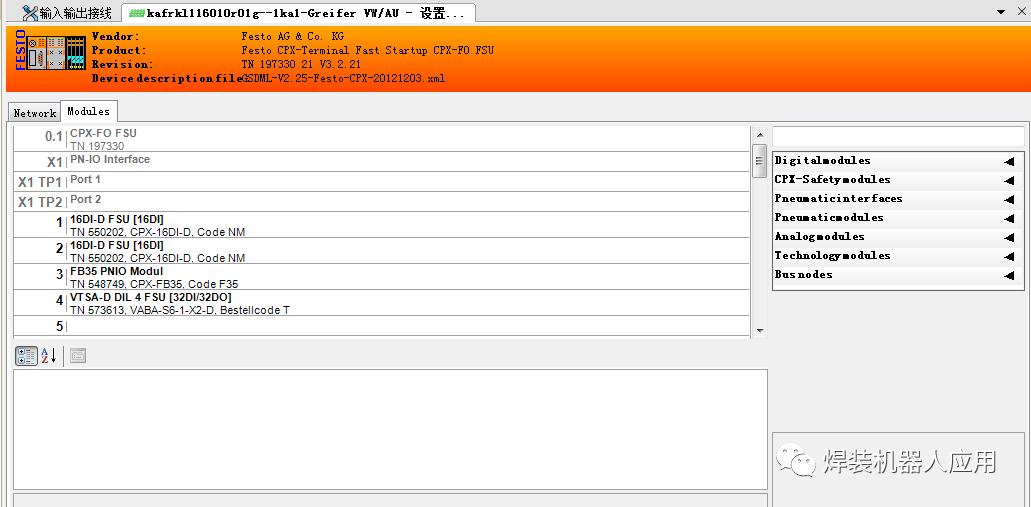
WorkVisual软件打开机器人快换系统I/O模块组态,4-7接口为输入信号接口对应DI1-DI8。
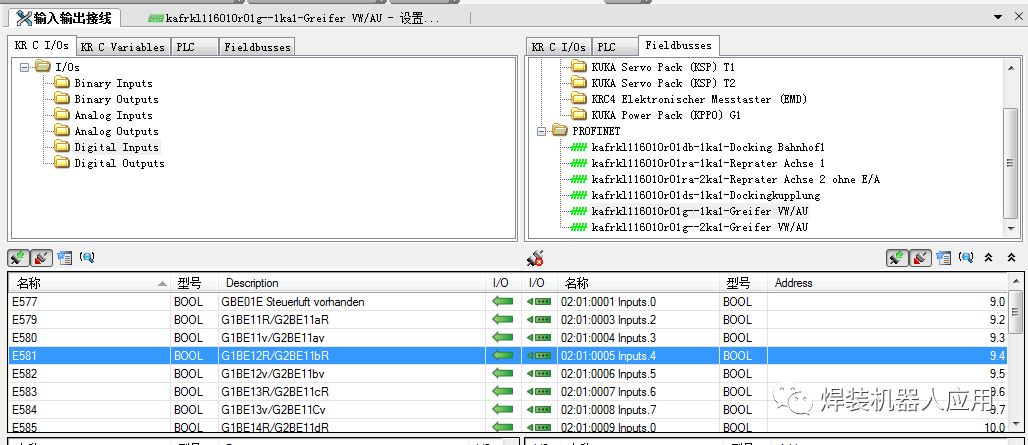
5号端口的第二个信号输入点为03槽位的第4个信号.
如下图;
打开WorkVisual中的接线编辑器窗口如图;
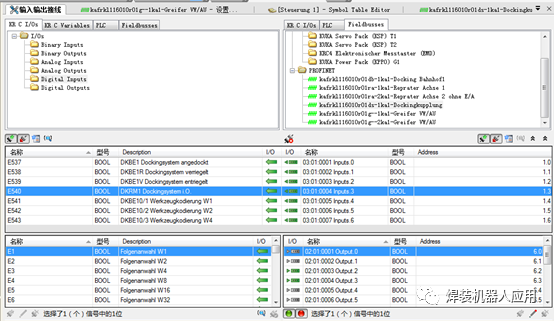
I/O模块名称栏如图;
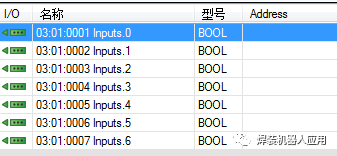
03:表示该地址位对应的组态槽位
0004:表示该槽位的第几个信号
03:01:0004 Inputs.3即为快换系统准备好信号的输入端口,将该端口与相应的输入信号连接,这个输入信号就可以接收到快换系统反馈的准备好状态了。
抓手模块也是如此
WorkVisual中的组态如图;
信号连接如图;
----------希望我的分享对您有所帮助----------

关注公众号持续更新机器人应用相关知识
这篇关于信号与槽是如何实现的_机器人信号与IO模块接口的对应的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






