本文主要是介绍国产航顺HK32F030M: 超声波测距模块串口通信数据接收与处理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

参考代码
/**************************************************************************************************
* @file usart_async_tx_no_int_rx_rxneint.c
* @brief 异步串口通信例程, 通过查询TXE标志发送数据,通过RXNE中断接收数据,当中断接收到数据后会将
* 收到的数据原样通过TX引脚发送出去
* @author
* @date
**************************************************************************************************/#include "bsp_usart.h"uint8_t Rcv_data[4]={0};//接收数组
uint8_t Rcv_flag=0;//接收标志
uint8_t Cnt_cart=0;//接收数据长度static void USART_NVIC_Configurature(void)
{
// NVIC_SetPriority(USART1_IRQn,0);
// NVIC_EnableIRQ(USART1_IRQn);NVIC_InitTypeDef NVIC_InitStructure;/* 配置USART为中断源 */NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;/* 优先级*/NVIC_InitStructure.NVIC_IRQChannelPriority = 0;/* 使能中断 */NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;/* 初始化配置NVIC */NVIC_Init(&NVIC_InitStructure);
}static void USART_GPIO_Configurature(void)
{GPIO_InitTypeDef m_gpio;USART1_TX_IO_CLK_EN();USART1_RX_IO_CLK_EN();m_gpio.GPIO_Mode = GPIO_Mode_AF;m_gpio.GPIO_OType = GPIO_OType_PP;m_gpio.GPIO_Pin = USART1_TX_PIN;m_gpio.GPIO_PuPd = GPIO_PuPd_NOPULL;m_gpio.GPIO_Speed = GPIO_Speed_10MHz;GPIO_Init(USART1_TX_PORT, &m_gpio);GPIO_PinAFConfig(USART1_TX_PORT,USART1_TX_PIN_SOURCE,GPIO_AF_1); // TX--PA3m_gpio.GPIO_Pin = USART1_RX_PIN;GPIO_Init(USART1_RX_PORT, &m_gpio);GPIO_PinAFConfig(USART1_RX_PORT,USART1_RX_PIN_SOURCE,GPIO_AF_1);// RX--PD6
}void USART_Config(uint32_t bound)
{USART_InitTypeDef m_usart;//GPIO端口设置USART_GPIO_Configurature();// 函数调用RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//USART 初始化设置m_usart.USART_BaudRate = bound;// 波特率m_usart.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制m_usart.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式 接收发送都使能m_usart.USART_Parity = USART_Parity_No;//无奇偶校验位m_usart.USART_StopBits = USART_StopBits_1;//一个停止位m_usart.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_Init(USART1, &m_usart);//初始化串口1USART_Cmd(USART1, ENABLE);//使能串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断//Usart1 NVIC 配置USART_NVIC_Configurature();//函数调用
}void USART_SendByte(uint8_t ch)
{while((USART1->ISR & USART_ISR_TXE) == 0);USART1->TDR = ch; // 串口发送
}void USART_SendStringLen(uint8_t *p,uint16_t len)
{while(len--){USART_SendByte(*(p++));}
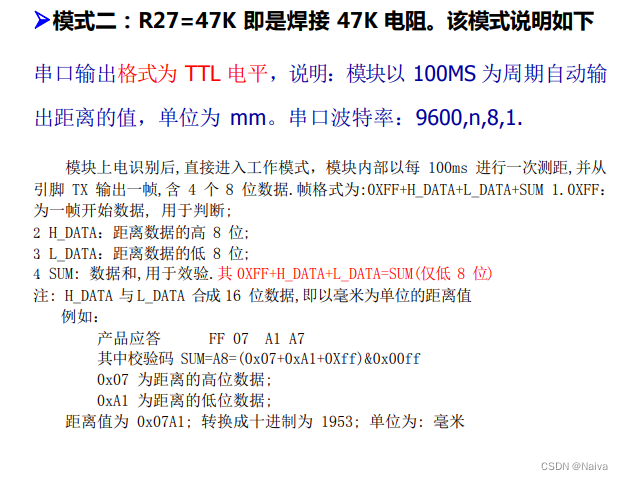
}//例如:
//产品应答 FF 07 A1 A7
//其中校验码 SUM=A8=(0x07+0xA1+0Xff)&0x00ff
//0x07 为距离的高位数据;
//0xA1 为距离的低位数据;
//距离值为 0x07A1; 转换成十进制为 1953; 单位为: 毫米
void uart_Run(void)//数据处理函数
{if(Rcv_flag==1){USART_Temp = ((uint16_t)Rcv_data[1]<<8) + Rcv_data[2] ; // 左移八位数据进行合并 例如:0x07<<8 = 0x0700 }
}// 串口中断服务函数 USART1_IRQHandler
//void USART1_IRQHandler(void)
//{
uint32_t ch_rx_test;
// if((USART1->ISR & USART_ISR_RXNE) != 0)
// {
// USART_Temp = USART1->RDR; // 串口接收
//
// Display_IntData((uint32_t)USART_Temp);
// USART_SendByte(USART_Temp);
// }
//}void USART1_IRQHandler(void)
{if((USART1->ISR & USART_ISR_RXNE) != 0){ if(Cnt_cart<=3)//计数{Rcv_data[Cnt_cart]=USART1->RDR;//接收的数据存入数组if(Rcv_data[0]==0XFF) // 帧格式为:0XFF+H_DATA+L_DATA+SUM{Cnt_cart++;//计数值累加}else{Cnt_cart =0;USART_ClearFlag(USART1,USART_FLAG_RXNE);//清除中断标志}}else{Cnt_cart=0;if(Rcv_data[0] == 0xFF && Rcv_data[3] == ((Rcv_data[1]+Rcv_data[2]+Rcv_data[0])&0x00FF))// 校验接收的数据是否正确 起始位 校验位 长度{Rcv_flag=1;//接收成功标志} USART_ClearFlag(USART1,USART_FLAG_RXNE);//清除中断标志} }// else
// {
// if(USART_GetFlagStatus(USART1,USART_FLAG_ORE) != RESET) // 相同代码 函数版
// {
// USART_ReceiveData(USART1);
// USART_ClearFlag(USART1,USART_FLAG_ORE);//清除中断标志
// }
// }USART_ClearFlag(USART1,USART_FLAG_ORE);//清除中断标志
}资料下载
-
【CSDN】 资料:HK32F030M超声波测距(20240206)
-
【CSDN】PCB:隆鑫样品-超声波测距处理器-2024年1月28日
这篇关于国产航顺HK32F030M: 超声波测距模块串口通信数据接收与处理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






