本文主要是介绍工业相机和镜头的参数理解、选型、打光方案总结(附参考案例),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1.工业相机分类:
- 2.工业相机相关参数:
- 3.工业相机镜头相关参数
- ①焦距
- ②接圈
- ③光圈
- ④景深
- ⑤最大CCD尺寸
- ⑥接口
- ⑦视野范围
- ⑧工作距离
- ⑨光学放大倍数
- ⑩数值孔径
- 4.工业相机选型注意:
- 5.工业相机镜头选型注意:
- 6.如果已知被测物体的尺寸,选择工业相机和镜头步骤:
- 7.光源的分类与选择、打光方式的选择:
1.工业相机分类:
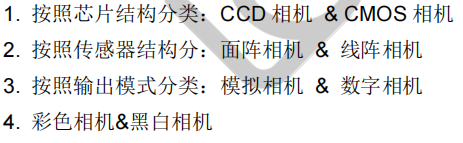

2.工业相机相关参数:

各类数据接口:
GIGE:千兆网接口的工业相机,应用中还是非常多的。
1394:协议、编码方式都非常不错,传输速度也比较稳定,只不过由于早期苹果的垄断,造成其没有被广泛应用。
USB:2.0传输慢,3.0很快;而且不需要采集卡,每个电脑能直接连接。
Camera Link:2.0传输慢,3.0很快;而且不需要采集卡,每个电脑能直接连接。

3.工业相机镜头相关参数
①焦距
焦距(FocalLength):对于单片透镜而言,指平行光从透镜的光心到光聚集之焦点的距离。

焦距(FocalLength):对于相机而言,从镜片中心到底片或CCD等成像平面的距离。

 (图片转自https://blog.csdn.net/weixin_43217963)
(图片转自https://blog.csdn.net/weixin_43217963)
通常物距u 远大于焦距f,所以近似1/v=1/f。焦距是固定不变的参数(对于定焦镜头)
调焦的过程就是将像距(透镜和成像面的距离)微调和焦距基本相差不远(v≈f),从而获得清晰的图像。
②接圈
增加接圈实际上增加了像距v,然后焦距是固定不变的参数(对于定焦镜头),物距就会减小,即工作距离WD减少,因此视野减少,图像会被放大。
作用:加接圈使相距增大;加接圈使工作距离变小;加接圈使视野变小;加接圈使图像放大。但是加接圈会使景深变小。
③光圈
 (图片转自https://blog.csdn.net/qq_38241538)
(图片转自https://blog.csdn.net/qq_38241538)
光圈(Iris):用F表示,以镜头焦距f和通光孔径D的比值来衡量。每个镜头上都标有最大F值,例如 8mm /F1.4代表最大孔径为 5.7毫米 。F值越小,光圈越大,F值越大,光圈越小。
④景深
景深(Depth of Field,DOF):景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。景深随镜头的光圈值、焦距、拍摄距离而变化,光圈越大,景深越小(浅),光圈越小,景深越大(深)。焦距越长,景深越小,焦距越短,景深越大。距离拍摄物体越近时,景深越小,拍摄距离约远,景深越大。
⑤最大CCD尺寸
最大CCD尺寸(SensorSize):镜头成像直径可覆盖的最大CCD芯片尺寸。主要有:1/2″、2/3″、1″和1″以上。
⑥接口
接口(Mount):相机与镜头的连接方式,常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75。

(图片转自https://blog.csdn.net/iflyme)
⑦视野范围
视野范围(Field of View,FOV):即视场角,相机实际拍摄到的区域尺寸。
⑧工作距离
工作距离(Work Distance,WD):镜头第一个工作面到被测物体距离。
⑨光学放大倍数
光学放大倍数(Magnification,b):CCD/FOV,即芯片尺寸除以视野范围。
⑩数值孔径
数值孔径:数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a\2)的正弦值的乘积,计算公式为N.A=n*sina/2。
4.工业相机选型注意:



5.工业相机镜头选型注意:
1.选择镜头接口和最大CCD尺寸:镜头接口只要可跟相机接口匹配安装或可通过外加转换口匹配安装就可以了;镜头可支持的最大CCD尺寸应大于等于选配相机CCD芯片尺寸。
2.选择镜头焦距:在已知相机CCD尺寸、工作距离(WD)和视野(FOV)的情况下,可以计算出所需镜头的焦距(f)。

焦距f = WD × 靶面尺寸( H or V) / FOV( H or V) 光学倍率 = 靶面尺寸( H or V) / FOV( H or V)
3.选择镜头光圈:镜头的光圈大小决定图像的亮度,在拍摄高速运动物体、曝光时间很短的应用中,应该选用大光圈镜头,以提高图像亮度。
4.选择远心镜头:远心镜头是为纠正传统镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化。远心镜头与传统镜头对比,如图:
6.如果已知被测物体的尺寸,选择工业相机和镜头步骤:
(计算参考:https://blog.csdn.net/iflyme/article/details/86085119)
工业相机:
感光芯片类型: CDD or CMOS
视频特点:点频 or 行频
信号输出接口类型:GigE、1394、USE、CameraLink
相机工作模式:连续、触发、脉冲控制、异步复位、长时间积分
视频参数调整及控制方法:手动、RS232、网络、其他总线控制
相机分辨率:根据镜头和目标物体的检测精度判断,参考上述连接。
镜头:
根据相机芯片尺寸选镜头 (相机小尺寸靶面的CCD要选靶面尺寸规格更大的镜头)
相机上安装镜头的接口类型(C/CS或其他)
镜头工作距离 (由机器运动的行程为参考,考虑是否加接圈)
镜头视野范围(由视场角决定)
镜头光谱特性(针对不同材质的工件和选定的光源类型综合考虑)
镜头机械结构(和3类型,需考虑硬件情况)
镜头放大倍率:根据相机和目标物体的检测精度判断,参考上述连接。
计算公式:
FOV( H or V) = 靶面尺寸( H or V) /光学倍率 ①
精度=FOV( H or V) /像素(H or V) ②
焦距f = WD × 靶面尺寸( H or V) / FOV( H or V) ③
(远心镜头直接用①②可以算)(定焦镜头则需要参考镜头参数手册,里面会有不同WD下的FOV和放大倍率,省掉自己用视场角计算)
靶面尺寸表供参考:

7.光源的分类与选择、打光方式的选择:
光源的选择标准如下:
(1)光源均匀性要好,在有效的照射范围内,灰度值标准差要小;
(2)具有较宽的光谱范围,可以对不同材料的物体进行检测;
(3)光照强度要足够,提高信噪比,利于图像处理;
(4)具有较长的使用寿命及较高的稳定性,要保障光源在长时间运行状态下能够持续稳定的提供照明环境;
(5)成本低,易根据现场情况定制特殊形状光源
光源类型:



常见的打光方式有以下几种:
1.前面打光法
2.后面打光法
3.结构光打光法
4.混合多方式照明
5.特殊式
(注:高低角度光源,光源厂商定义基准不一样,本文以水平为0度)
(1)高角度照射
特点:在一定工作距离下,光束集中、亮度高、均匀性好、照射面积相对较小。常用于液晶校正、塑胶容器检查、工件螺孔定位、标签检查、管脚检查、集成电路印字检查等。(30、45、60、75等角度环光)

(2)低角度照射
特点:对表面凹凸表现力强。适用于晶片或玻璃基片上的伤痕检查。(0度环光,0度条光)

案例:
(3)垂直照射
特点:照射面积大、光照均匀性好、适用于较大面积照明。可用于基底和线路板定位、晶片部件检查等(0角度环光、面光源)。

(4)背光照射
特点:光源安置在与相机同轴且位于被测物体的后面。 背光方式用来突出显示不透明物体的外形轮廓, 所以这种照明方式只适用于待测目标需要的信息可以从其轮廓中获得的场合。例如尺寸测量、 形状判断等。(背光源、平行背光源)

案例:
(5)多角度照射
特点:RGB三种不同颜色不同角度光照,可以实现焊点的三维信息的提取。适用于组装机板的焊锡部份、球形或半圆形物体、其它奇怪形状物体、接脚头(AOI光源)
(6)半球积分照明
特点:360度底部发光,通过碗状内壁发射,形成球形均匀光照。用于检测曲面的金属表面文字和缺陷。(球积分光源,通常也叫圆顶光)
(7)同轴光照明
特点:类似于平行光的应用,光源前面带漫反射板,形成二次光源,光线主要趋于平行。用于半导体、PCB板、以及金属零件的表面成像检测,微小元件的外形、尺寸测量。(同轴光源,平行同轴光源)

案例:
(8)其他光源及其照射方式

护照检测:同轴光,条形光,环形光,组合使用,以适应各种缺陷

对位装置:环形光,同轴光,既能实现Mark点定位,又能实现检测功能

多色组合光源:应轻松应对不同颜色的工件
(以上打光方案图片均来自:https://blog.csdn.net/IntegralforLove)
以上是本人综合了一些网上相关知识的一些理解总结,仅供参考。
本文可能有不全面或不清晰部分,有兴趣的老铁还可以参考:
机器视觉硬件【光源(打光),相机,镜头】知识好文链接合集
这篇关于工业相机和镜头的参数理解、选型、打光方案总结(附参考案例)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





