本文主要是介绍【直流电机H桥的三种驱动方式:受限单机模式,单极模式,双极模式】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、引出
1、简单的开关串联电机只能控制有刷直流电机的启停,要同时控制正反转和转速就要引入H桥式控制电路。
2、对4个开关管的控制采用PWM,调节占空比可以实现调速。PWM频率一般在10KHz到20KHz之间,频率太低会导致电机转速过低,噪声较大。频率太高,会因为MOS管的开关损耗而降低效率。
3、根据对桥臂上MOS的PWM控制方式不同,分为三种控制模式:受限单极模式、单极模式、双极模式。
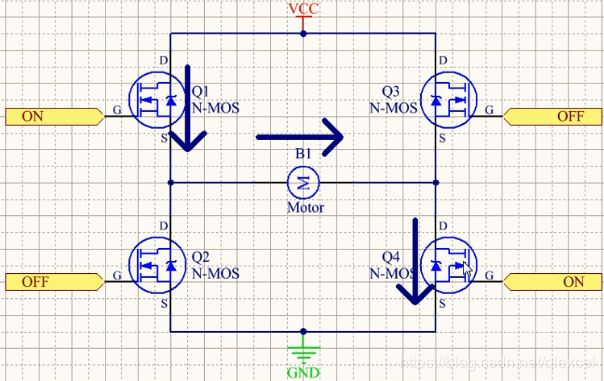
二、受限单极模式
电机电枢驱动电压极性是单一的。需要对一个MOS控制PWM控制。
优点:控制方式简单。
缺点:不能刹车,不能能耗制动,在负载超过设定速度时不能提供反向力矩。调速静差大,调速性能很差,稳定性也不好。
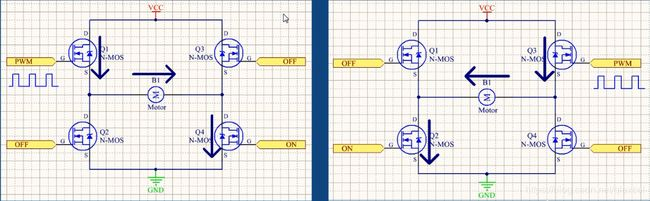
三、单极模式
电机电枢驱动电压极性是单一的。需要对同一侧桥臂的两个MOS管进行互补PWM控制。要使用高级定时器的互补通道进行控制。
优点:启动快,能加速,刹车,能耗制动,能量反馈,调速性能不如双极模式好,但是相差不多,电机特性也比较好。在负载超速时也能提供反向力矩。
缺点:刹车时,不能减速到0,速度接近0时没有制动力。不能突然倒转。动态性能不好,调速静差稍大。
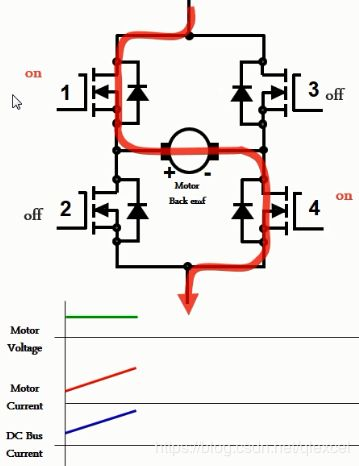
控制过程:MOS管1和2由一对互补PWM进行控制,当1为高电平时,由VCC-1-Motor-4-GND形成通路,电机电流上升。当1为低电平时,2变为高电平,根据楞次定律,当不再给电机供电,线圈中存在自感电动势,电流继续往同一方向流动,于是由2-Motor-4形成通路,给线圈电流继续提供通路。
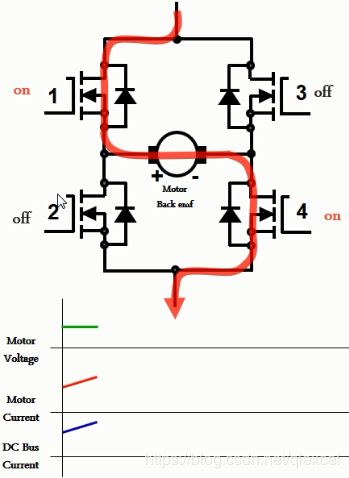 1.4导通 1.4导通 |  2.4导通 2.4导通 | 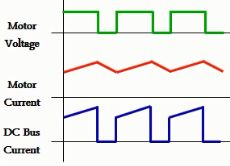 绿控制;红电流;蓝电压 绿控制;红电流;蓝电压 |
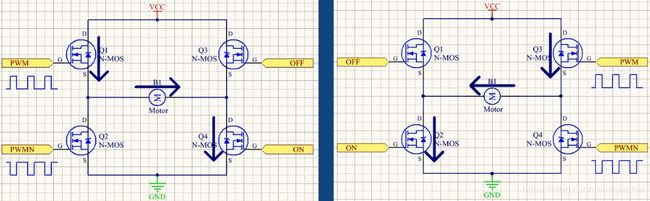
四、双极模式
电枢电压极性是正负交替的。需要两组互补PWM同时对4个MOS管进行控制。
优点:能正反转运行,启动快,调速精度高,动态性能好,调速静差小,调速范围大,能加速,减速,刹车,倒转,能在负载超过设定速度时提供反向力矩,能克服电机轴承的静态摩擦力,产生非常低的转速。
缺点:控制电机复杂,在工作期间,4个MOS管都处于开关状态,功耗大。
控制过程:1和4同时处于PWM的高电平,于是由VCC-1-Motor-4-GND形成通路,电流上升。当1和4同时变为低电平,2和3相应变为高电平,因为楞次定律,线圈上的电流方向不变,于是由GND-2-Motor-3-VCC形成通路,虽然存在反向的供电电压,但是电机的线圈电流更大,于是电流仍然向VCC流动,同时电流下降的更快,线圈电流波动也更大。
 1.4导通 1.4导通 | 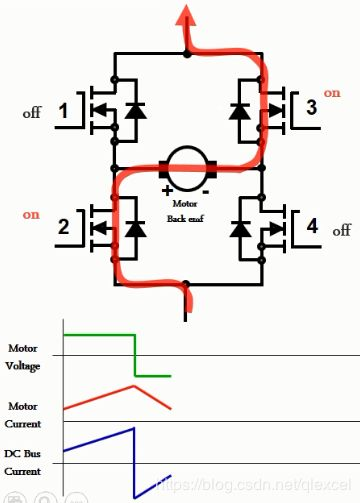 2.4导通 2.4导通 | 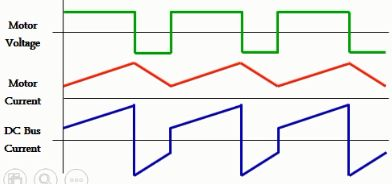 绿控制;红电流;蓝电压 绿控制;红电流;蓝电压 |
这篇关于【直流电机H桥的三种驱动方式:受限单机模式,单极模式,双极模式】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








