概述
在前边一篇文章,我们讲了如何复现论文代码,使用pascal voc 2012数据集进行训练和验证,具体内容可以参考《deeplab v3+在pascal_voc 2012数据集上进行训练》,在本篇文章,我们主要讲述,如何对deeplab v3+进行迁移学习,也即如何使用deeplab v3+算法来训练个人的数据集。
1. 数据集准备
首先在开始之前我们先对数据集做一个简单的说明,由于deeplabv3+使用的TensorFlow框架,并且为了提高训练的速度,因此在训练开始前,需要转换成tfrecorde类型的文件来进行训练,因此,我们直接仿照pascal voc 2012数据集的数据结构来制作数据集,这样我们在训练所需图片准备完成之后可以直接复用转换tfrecorde的脚本。
1.1 标注图片,获取json文件
古人有句话:兵马未动粮草先行,而对深度学习来说,粮草毫无疑问指的是训练的数据,毕竟我们最终的模型都是依靠数据来喂养出来的🐶!因此选择一个趁手的标注工具很重要,此处我推荐使用labelme,标注起来相当方便。
下边我简单说一下lableme的安装方法(此处建议使用Anconda来实现环境隔离)。
-
安装Ancodna环境,
执行如下命令:
conda create --name=labelme python=2.7(这一步python=*选择自己的Python版本) activate labelme -
安装软件与依赖
conda install pyqt pip install labelme -
启动与使用
activate labelme labelme
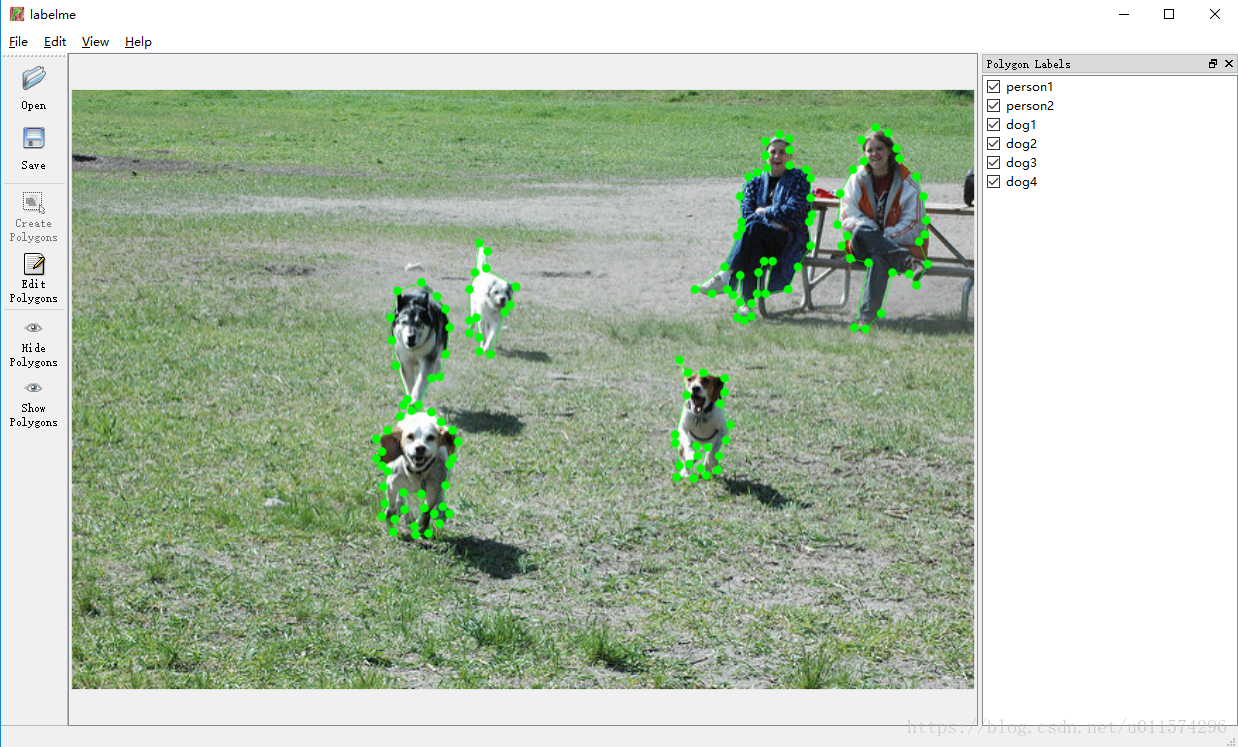
启动完成之后可以看到如下界面:
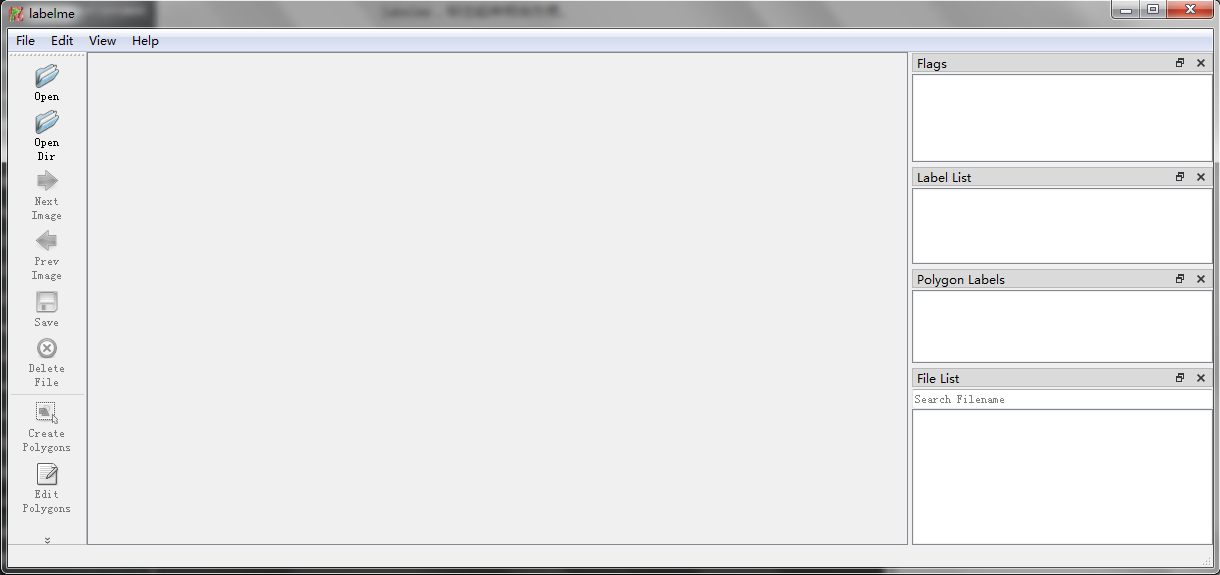
标注的时候,将物体用线条框起来即可,例如:
1.2 转换json,获取png图片
在图像标注完成之后,在我们对应设置的文件夹下有许多json,这些json文件记录了所标注图片的位置以及图片内容等信息,根据这些信息我们可以转换成训练所需要的mask图(此处是png格式的图片)。
虽然labelme中包含labelme_json_to_dataset来帮助我们将json图片转成png图片,但是该命令有一个巨大的缺点就是无法实现批量转换,因此需要我们自己写一个批量转换的脚本来辅助转换。
一个简单的转换脚本如下:
import os
#path = 'C:/Users/tj/Desktop/dd' # path为labelme标注后的.json文件存放的路径
path = 'C:\\Users\\Administrator\\Desktop\\第五次数据集扩充\\labels'
json_file = os.listdir(path)
for file in json_file:if(file.split('.')[1]=='json'):os.system("labelme_json_to_dataset %s" % (path + '/' + file)) #
# C:/soft/ev4/venv/Scripts/labelme_json_to_dataset.exe 为labelme_json_to_dataset.exe的路径 path + '/' + file 为读取.json路径print(path + '/' + file)通过该脚本每一个json文件都会生成一个以其名字命名的文件夹。

进入该文件我们可以看到有如下四个文件:
img.png
lable.png
label_names.txt
label_viz.png其中第二个文件使我们所需要的用于训练的文件,因此我们需要将该文件整合重命名成其原来json文件的文件名(主要原因是保证和原图的文件名保持一致,便于后续训练)。
从文件夹中提取图片并重命名,我也简单写了一个脚本,可以用于参考,具体内容如下:
import os
path = 'c:\\Users\\Administrator\\Desktop\\temp\\'
output='c:\\Users\\Administrator\\Desktop\\output\\'
fileDirs=os.listdir(path)
for fileDir in fileDirs:file=path+fileDir+"\\label.png"if(os.path.exists(file)):# 输出的文件直接以上层文件夹命名end= len(fileDir);fileName=fileDir[:end-5]os.rename(file,output+fileName+".png")此处处理完成我们便会的到一系列的mask图片,此时我们便可以着手数据集的制作。
1.3 制作数据集
正如前边所说,我们在制作数据集的时候仿照的是pascal voc 2012的数据集,因此需要创建预期类似文件夹结构。
- 我们首先在
models/research/deeplab/datasets文件夹下为自己的训练集创建一个目录,目录名称即自己的训练集名称。执行如下命令:
cd ~/models/research/deeplab/datasets
mkdir mydataset
cd mydataset- 创建与voc数据集类似的文件夹
# 存放mask文件
mkdir SegmentationClassRaw
# 存放原图
mkdir JPEGImages
# 存放数据集描述文件
mkdir Segmentation
# 存放预训练权重,如不需要预训练权重可不创建
mkdir tf_initial_checkpoint
# 训练权重保存目录
mkdir train_logs
# 评估以及测试结果的生成目录
mkdir vis
# 存放tfrecorde-
将训练数据放到指定文件夹中:
- SegmentationClassRaw:存放mask文件,也就是前边我们所转换提取的png图片
- JPEGImages:存放训练集、验证集以及测试集的原始图片
- Segmentation:存放数据集描述文件,包含三个文件
train.txt、trainval.txt、val.txt- train.txt:记录训练集的图片名称
- trainval.txt:该文件中所记录的内容,后续既会被当做训练集来训练,后续也会被当做验证集来做验证
- val.txt用以记录验证集的图片名称
-
转换成tfrecorde文件。
在
dataset目录下,执行如下命令:python3 "build_voc2012_data.py" \--image_folder="${IMAGE_FOLDER}" \--semantic_segmentation_folder="${SEMANTIC_SEG_FOLDER}" \--list_folder="${LIST_FOLDER}" \--image_format="jpg" \--output_dir="${OUTPUT_DIR}"
执行成功后,会在tfrecorde目录下出现如下文件,证明转换成功:

代码修改
在models/research/deeplab/datasets目录下:
- 在
remove_gt_colormap.py修改的内容如下:
51行左右,
old_raw_pic=np.array(Image.open(filename))
#原来像素比为0:1:2:3乘以50之后变成0:50:100:150
raw_pic=old_raw_pic*50
return raw_pic- 在
data_generator.py中修改的内容:
104行左右
# has changed 增加数据集种类,以及训练验证集合的数量,修改物体类别3+1+1
_MYDATASET = DatasetDescriptor(splits_to_sizes={'train':392,'trainval':98,'val':5,},num_classes=5, # classes+label+ignore_labelignore_label=255,
)
#has changed_DATASETS_INFORMATION = {'cityscapes': _CITYSCAPES_INFORMATION,'pascal_voc_seg': _PASCAL_VOC_SEG_INFORMATION,'ade20k': _ADE20K_INFORMATION,'mydataset':_MYDATASET,
}在models/research/deeplab/utils下
- 在
get_dataset_colormap.py文件中
在第41行左右,增加训练种类
# has changed
_MYDATASET='mydataset'在388行左右,直接使用pascal的colormap
#has changed
elif dataset == _MYDATASET:
return create_pascal_label_colormap()- 在
train_utils.py中修改的内容
153行左右,进行训练权重的修改。具体修改参考https://blog.csdn.net/jairana/article/details/83900226
# has changedignore_weight = 0label0_weight = 1 # 对应background,mask中灰度值0label1_weight = 10 # 对应a,mask中灰度值1label2_weight = 10 # 对应b,mask中灰度值2label3_weight = 10 # 对应c,mask中灰度值为3not_ignore_mask = tf.to_float(tf.equal(scaled_labels, 0)) * label0_weight + \tf.to_float(tf.equal(scaled_labels, 1)) * label1_weight + \tf.to_float(tf.equal(scaled_labels, 2)) * label2_weight + \tf.to_float(tf.equal(scaled_labels, 3)) * label3_weight + \tf.to_float(tf.equal(scaled_labels, ignore_label)) * ignore_weighttf.losses.softmax_cross_entropy(train_labels,tf.reshape(logits, shape=[-1, num_classes]),weights=not_ignore_mask,scope=loss_scope)# end change228行,排除列表中增加logits
exclude_list = ['global_step','logits']在目录models/research/deeplab/deprecated下
segmentation_dataset.py文件中
在90行,增加数据类别
#has changed_MYDATASET= DatasetDescriptor(splits_to_sizes={'train':392,'trainval':98,'val':5,},num_classes=5,ignore_label=255,#background、ignore_label、ignore_label,即label数+2)在128行左右,注册新数据集
_DATASETS_INFORMATION = {'cityscapes': _CITYSCAPES_INFORMATION,'pascal_voc_seg': _PASCAL_VOC_SEG_INFORMATION,'ade20k': _ADE20K_INFORMATION,# has changed'mydataset':_MYDATASET
}在models/research/deeplab/train.py目录下
158行左右,修改两个参数(使用所有的预训练权重,除了logits,因为如果是自己的数据集,对应的classes不同(这个我们前面已经设置不加载logits),可设置initialize_last_layer=False和last_layers_contain_logits_only=True),可参考https://blog.csdn.net/u011974639/article/details/80948990
# has changed
flags.DEFINE_boolean('initialize_last_layer',False,'Initialize the last layer.')flags.DEFINE_boolean('last_layers_contain_logits_only', True,'Only consider logits as last layers or not.')训练与验证
训练
执行如下命令开始进行训练:
python train.py \--logtostderr \--training_number_of_steps=5000 \--train_split="train" \--model_variant="xception_65" \--atrous_rates=6 \--atrous_rates=12 \--atrous_rates=18 \--output_stride=16 \--decoder_output_stride=4 \--train_crop_size="513,513" \--train_batch_size=12 \--dataset="mydataset" \--tf_initial_checkpoint='init_models/deeplabv3_pascal_train_aug/model.ckpt' \--train_logdir='datasets/mydataset/train_logs' \--dataset_dir='datasets/mydataset/tfrecord'验证
python eval.py \--logtostderr \--eval_split="val" \--model_variant="xception_65" \--atrous_rates=6 \--atrous_rates=12 \--atrous_rates=18 \--output_stride=16 \--decoder_output_stride=4 \--eval_crop_size="1217,1921" \--checkpoint_dir='models/research/deeplab/datasets/mydataset/train_logs' \--eval_logdir='datasets/mydataset/eval' \--dataset_dir='datasets/mydataset/tfrecord' \--max_number_of_evaluations=1遇到的如果问题与解决方案
-
无法找到slim。
解决方法:进入
models/research目录下执行export PYTHONPATH=$PYTHONPATH:`pwd`:`pwd`/slim:`pwd`/deeplab\ -
数据格式不支持,检查是否注册了自己的数据格式



