本文主要是介绍GNSS 多星定位原理及校正方式对比,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
No.1
前言
具有全球导航定位能力的卫星导航定位系统称为全球卫星导航系统,英文全称为Global Navigation Satellite System,简称为GNSS。泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的GPS、俄罗斯的glonass、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统,如美国的WAAS(广域增强系统)、欧洲的EGNOS(欧洲静地导航重叠系统)和日本的MSAS(多功能运输卫星增强系统)等,还涵盖在建和以后要建设的其他卫星导航系统。国际GNSS系统是个多系统、多层面、多模式的复杂组合系统。使用多星座 GNSS 接收器的优势在于:更好地提供定位、导航、定时 (PNT) 信号,提高准确性、完整性并改善应用的稳健性。

但是,多星座接收器开发是一项复杂、耗时的工作,其中包括:优化l波段天线;设计射频 (RF) 前端;整合基带信号处理算法以获取、跟踪和应用各种 PNT 信号的修正;对应用的处理软件进行编码,以便从基带的每个通道提取 PNT 数据并使用这些信息实现系统功能。设计者还必须选择合适的天线并将其正确放置。
设计者可以转向预制型 GNSS 模块和开发环境,快速有效地将定位功能集成到系统中。这种 GNSS 模块包括射频前端、基带处理和嵌入式固件,有些 GNSS 模块还包括天线。以便加快应用处理软件的开发。
No.2
什么是 GNSS 和 PNT?
GNSS 和 PNT 是密切相关的概念。GNSS 卫星是 PNT 信号的最常见来源。GNSS 卫星本质上是高度精确的同步时钟,不断广播其PNT 信息。GNSS 模块接收来自特定卫星的 PNT 信号并计算其与该卫星的距离。当接收器知道与至少四颗卫星的距离时,就可以估计其本身的位置。然而,位置估计的准确性受到各种误差源的影响,具体包括:
•GNSS卫星中计时电路的时钟漂移
•预测 GNSS 卫星准确轨道位置的 误差
•整个卫星设备相对于其他卫星的一般性能漂移,也就是所谓的卫星偏移
•信号在通过电离层和对流层时发生失真和延迟。
•多路径反射和接收器中的可变性能和漂移
目前,设计者可以采用各种不同技术校正基于卫星和大气的 GNSS 误差。
No.3
提高 GNSS 性能
把源自 GNSS 接收器的误差影响降至最低的最佳方法是:使用适合特定应用的成本和尺寸限制的最高性能接收器。但是,即使是高性能的接收器也不是完美的;在很大程度上其性能还可提升。了解这些校正方法非常重要,因为这些方法会带来不同的性能,而且有些 GNSS 模块不能使用所有的校正方法。
有几种 GNSS 校正方法采用了地面参考基站(图 1)。实时运动学 (RTK) 和精密单点定位 (PPP) 是采用地面参考基站对 GNSS 进行校正的最成熟方法。近来又出现了 RTK-PPP 混合方法。
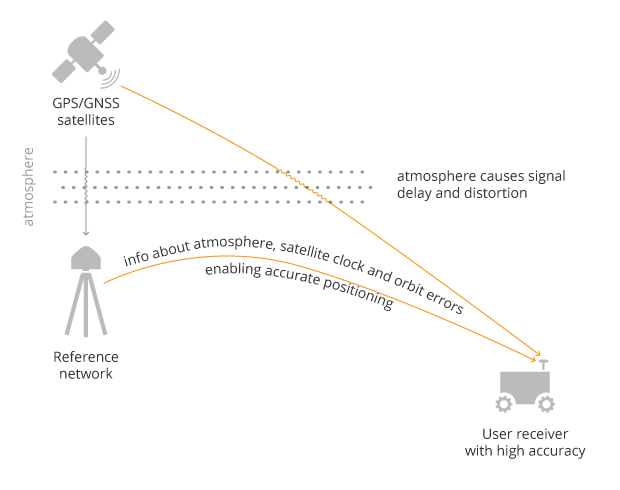
图 1:GNSS 用户接收器可以从参考网络中获取大气、时钟和轨道误差信息,以提高定位精度。(图片来源:Septentrio)
RTK 依靠单一基站或本地参考网络获得校正数据,可以消除大部分的 GNSS 误差。RTK 假定基站和接收器的位置很近——最多相距 40 公里或 25 英里,因此基站和接收器遇到的误差相同。后处理运动学 (PPK) 是 RTK 的一个变种技术,被广泛用于测绘,以获得高精度定位数据或厘米级精度。
只有轨道和卫星时钟误差被用来进行 PPP 校正。这些误差是卫星特有的误差,与用户位置无关,这就限制了所需参考基站的数量。然而,PPP 没有考虑与大气有关的误差,因此相对于 RTK 来说精度较低。此外,PPP 校正的初始化时间可能达到 20 分钟左右。较长的初始化时间和较低的精度使 PPP 技术在许多应用中无法使用。
对于那些要求接近 RTK 精度和快速初始化时间的应用来说,通常采用最新的 GNSS 校正服务,即 RTK-PPP(有时称为状态空间表示法 (SSR) )。这种技术采用一个参考网络,其基站间隔约为 100 km(65 英里),收集 GNSS 数据并计算卫星和大气的综合校正值。参考网络使用互联网、卫星或移动电话网络向用户发送校正数据。使用 RTK-PPP 的 GNSS 接收器能够达到亚厘米级精度。在选择使用 RTK、PPP 和 RTK-PPP 校正方法时会涉及到一系列的设计权衡,开发者需要进行审核,以选出适合具体应用情况的最佳解决方案。(图 2)。

图 2:三种常见 GNSS 校正方法的优缺点。
卫星增强系统 (SBAS) 正开始在区域范围内得以运用,以取代 RTK、PPP 和 RTK-PPP 的地面基站校正方法。SBAS 仍然使用地面站来测量 GNSS 误差,但这些地面站分布在各个洲。测量的误差在某个中心位置进行处理,在那里计算出校正值并传送到所覆盖地区的地球同步卫星。校正数据从卫星上播出,作为原始 GNSS 数据的叠加或增加。
GNSS 的精度取决于卫星测量和相关校正值的可用性和精度。高性能 GNSS 接收器在多个频率下跟踪 GNSS 信号,并使用多个 GNSS 星座和各种校正方法来提供所需的精度和恢复能力。由此产生的冗余可使性能稳定,即使有些卫星测量和数据遇到干扰时也是如此。设计者可以从各种 GNSS 精度和冗余能力中进行选择(图 3)。
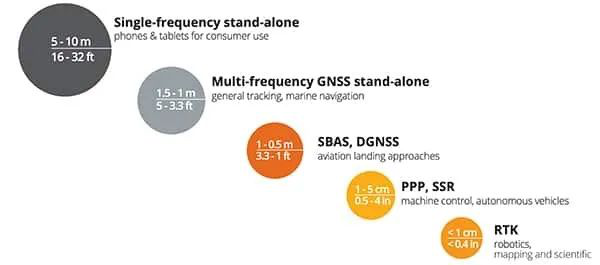
图 3:GNSS 精度等级与相应的校正方法和选定的应用。
No.4
GNSS 模块:集成天线与外部天线
由于多星座定位的复杂性,采用供应商提供的各种模块有助于加快产品上市,降低成本并确保性能。也就是说,设计者需要考虑使用内部天线还是选择位于 GNSS 模块外部的天线。对于那些需要优先考虑上市时间和成本的应用来说,集成天线可能是更好的选择,因为这种天线所涉及的工程量要小得多。对于需要 FCC 或 CE 认证的应用,使用带集成天线的模块也能加快认证过程。然而,这样会增加解决方案的尺寸,而且集成天线解决方案的灵活性有限。
外部天线为设计者提供了更多的性能和布局选择。设计者可选择大型高性能天线或者较小的低性能天线。此外,相对于 GNSS 模块的位置,天线的放置更加灵活,这将进一步提高设计灵活性。由于放置灵活,因此外部天线可确保 GNSS 可靠工作。然而,天线放置和连接布线既复杂又耗时,需要特殊的专业知识,这可能会增加成本并延缓上市时间。
No.5
总结
实现准确、可靠定位功能的最好方法是使用多个星座及相关的校正技术支持。这些都是复杂的系统,但设计者可以求助于预制型 GNSS 模块、相关的开发套件和环境,快速有效地比较各种选项并实施基于位置的功能和服务。
这篇关于GNSS 多星定位原理及校正方式对比的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






