机器人是新时代的代名词,机器人的神奇之处想必大多数朋友们都应该有领教过吧,无论是从报纸电视上看到的机器人都有一个共同的特性那就是“智能”。没错,机器人不智能你也不会用它,那么机器人究竟智能在哪里呢?
扫地机器人,又称机器人吸尘器(robotic vacuum cleaner或robovac),从名字可以看出,它与吸尘器有莫大渊源。
真空吸尘器是由地毯清扫器发展而来的,第一台地毯清扫器出现在1860年代,而第一台现代真空吸尘器则出现在20世纪初。英国人休伯特·布兹(Hubert Cecil Booth)在1901年发明,其主要部件是真空泵、集尘袋、软管及各种形状不同的管嘴,它有一个电动抽风机,通电后高速运转,使吸尘器内部形成瞬间真空,内部的气压大大低于外界的气压,在这个气压差的作用下,尘埃和脏物随着气流进入吸尘器桶体内,再经过集尘袋的过滤,尘垢留在集尘袋,净化后的空气则经过电动机重新逸入室内,起到冷却电机、净化空气的作用。
现代吸尘器在附件上变化多样,为清除地毯污物设计出了粗毛刷、细毛刷、转动毛刷,清理墙角用的是扁形管嘴、清理地析板用磨光刷等。虽然现代吸尘器在功能与清洁效率上与早期吸尘器相比有了巨大提升,但其原理基本保持没变,现在扫地机器人的清扫系统也基本沿用了这种结构。
扫地机器人的诞生——Electrolux Trilobite
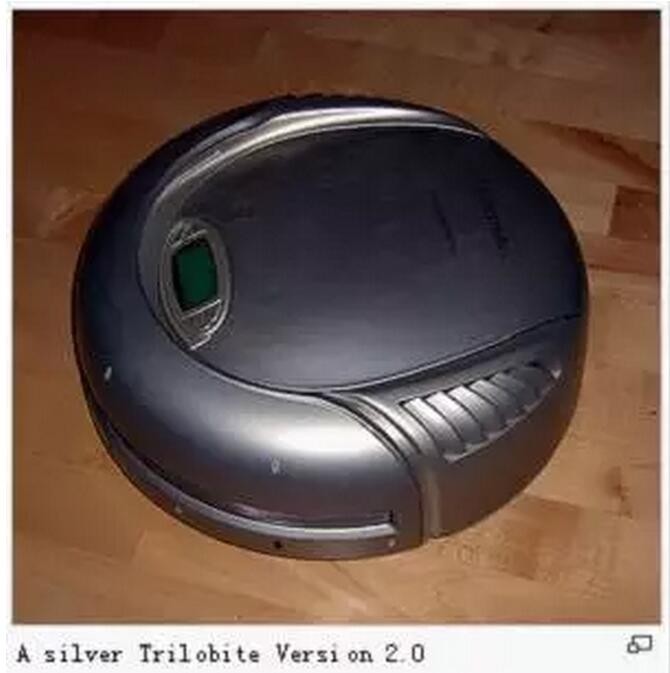
真空吸尘器已经诞生了一个世纪之久,但是它的继承者扫地机器人却出现了不到20年。世界上第一台量产型扫地机器人的原型出现于1996年,叫做“三叶虫”(Trilobite),它由瑞典家电巨头伊莱克斯(Electrolux)制造,因为其新奇性,英国BBC电视台的科学栏目《明日世界》(Tomorrow's World)曾在1996年5月播出的一期节目中介绍过它。直到2001年,Trilobite才被推向市场,并成为史上第一款量产的扫地机器人。
Trilobite通过超声波探测躲避障碍,同时帮助它构建房间地图。事实上第一代Trilobite对有些障碍物并不能很好的规避,第二代版本中加入了红外传感器,才使它规避障碍物能力有了很大的提升。在使用前,必须在房间门和楼梯尽头贴上磁条作为无形的墙壁阻止机器人的前进,防止机器人坠落或误入其它空间。Trilobite每次充电后可以运行60分钟,分三个挡位运作:正常、快速和点清理,吸尘器充满垃圾时还会发出灯光警告。它的高度只有13厘米,可以钻到桌子和床底下清理。由于其清扫过程完全自动,使用者可以把它留在家里清理房间,自己出去轻松消遣。

英国科技公司Dyson曾于2001年设计了一款名为DC06的扫地机器人,但因为价格过于高昂,并没有推出市面。
扫地机器人崭露头角——iRobot Roomba
毫无疑问,iRobot公司于2002年9月推出的Roomba是扫地机器人发展史上的里程碑式事件。iRobot公司由MIT计算科学与人工智能实验室的三位师生创建于1990年,与Electrolux本身就是吸尘器巨头不同,iRobot是一家彻底的机器人公司,创建之初的十年一直专注于军用机器人市场。
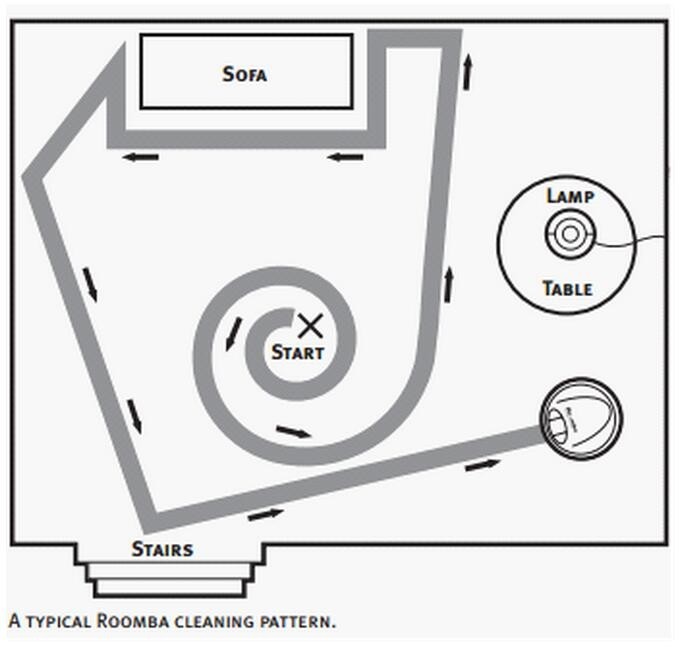
Roomba适用于木质地板、瓷砖、防水地毯和中短毛地毯,有S、M、L三种模式,分别对应小、中、大三种不同的清扫面积。它启动后会循螺旋状运转,并逐渐扩大螺旋形方式来涵盖整个空间,一旦碰到墙壁或其他大型障碍物时,其特殊的障碍物感应调节器就会抵住墙面保护机身不受损害,同时沿着墙壁开始清洁。当清洁过一部分空间后,Roomba会转过90度,按以上的方式清洁房间的另一端,通过交叉、重复螺旋运转的路线清洁。由于其强劲的清扫能力和便宜的价格,Roomba一推出市场便获得了巨大的成功,原本预计生产10,000至15,000部,但发售后大受市场欢迎,单是圣诞期间已出售50,000部。
| 扫地机器人之今生
Roomba系列扫地机器人的成功,让iRobot公司迅速成为市场的领导者,同时也让其它公司看到了巨大的商机,众多企业纷纷进入扫地机器人市场,并推出了各种型号的扫地机器人。这一方面促进了扫地机器人数量上的增长,另一方面也促进了其质量上的提升。
如今扫地机器人已逐步从原来的随机清扫发展到当前的路径规划式清扫中来,如果说原来的扫地机器人首要任务是功能实现的话,现在的主要任务已经变成质量和效率的提升了。现在比较著名的路径规划式扫地机器人主要有Neato,Dyson 360eye和iRobot的Roomba980。

Neato扫地机器人于2010年推出,使用一个可以360度旋转的激光测距仪扫描周围的环境并进行即时定位与环境地图构建(SLAM),在此基础上进行合理规划清扫路线。Neato还可以进行断点记忆恢复,当它因电量不足而自动返回充电完毕后,可以从上次返回的断点接着进行清扫。
著名传统吸尘器品牌Dyson十几年前的扫地机器人计划失败后,终于在2014年重返扫地机器人市场,推出了高端扫地机器人360Eye。它利用顶部搭载的摄像头全方位观测并分析周围环境,利用算法得出房间的地图和做出导航,并根据前后图像中各个地标的位置变化来判断当前的移动路线,并对其所构建的环境模型进行更新与调整。

去年,iRobot新推出了最新款的扫地机器人Roomba 980,在这款新产品中iRobot运用了最新的iAdapt 2.0寻路导航技术,它的最重要组成技术是VSLAM视觉定位与建模技术。在Roomba980的顶端,安装着一个大约斜45度的摄像头,拍摄到的图像经定位算法进行处理,识别出其中的特征。这样在程序运行时,机器人会一边建立环境地图,一边同时估计自身在环境中的位置。进而实现精准的清扫路径,达到高水平的清洁覆盖率。
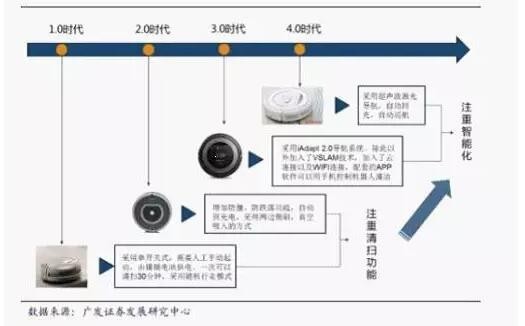
虽然出现了仅有十几年的时间,但是可以非常明确地看到:扫地机器人的技术更迭经历了两大阶段:
(1)扫地功能化完善阶段,扫地机器人的核心需求是完成扫地动作,如果最基础的需求不能满足,那么其存在的价值就会削弱,因此早期的扫地机器人主要围绕完善清扫系统而进行的;
(2)清扫智能化,扫地机器人是要替代人的行动,需要对家庭环境进行识别感知,因此一些附加的智能化技术开始融入扫地机器人,比如防撞功能、防跌落功能、路径规划导航技术、APP远程控制等。
扫地机器人仍然属于新兴行业,现在制约扫地机器人发展的一个重要问题是,机器人在寻路和返回基座充电时仍会出现偶尔失败,导致清扫不彻底或者无法返回。另一个问题是,受限于较小的体积,扫地机器人功率较小,清扫能力还不能和吸尘器相比。若能顺利解决这两大问题扫地机器人将迎来新的发展机遇,而广大消费者也将享受更加便利的生活,从枯燥的家务劳动中解放出来。
更多测评:http://www.jnw9.com








