本文主要是介绍MIMO雷达专题(〇)—— 总章,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
总章
1、毫米波雷达是什么
毫米波是指波长介于1-10mm的电磁波,波长短、频段宽,比较容易实现窄波束,雷达分辨率高,不易受干扰。毫米波雷达是测量被测物体相对距离、现对速度、方位的高精度传感器,早期被应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传感器开始应用于汽车电子、无人机、智能交通等多个领域。
2、车载毫米波雷达发展现状
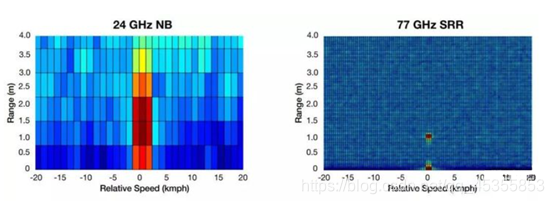
目前车载毫米波雷达频段主要集中在77GHz。24GHz的雷达测量距离较短,主要应用于汽车后方(24GHz雷达将被淘汰)。77GHz的雷达测量距离较长,主要应用于汽车前方和两侧。全球车载毫米波雷达的频段会趋同于77GHz频段(76-81GHz)。
77GHz比24GHz的诸多优势:
1,频段更高,提供更高测量精度,能够检测到较小物体。
2,超宽带,高分辨率能检测到超短距离,抗干扰能力强。
3,天线和波长成正比,体积尺寸重量小型化。
除此之外,AIP、SIP等系统级集成技术使得毫米波雷达向着小型化方向发展。大规模阵列(48发48收)、多片级联、MIMO、俯仰高分辨等技术探索与应用,将赋予毫米波雷达更加强大的场景感知与态势识别能力。
3、为什么要使用MIMO技术
毫米波雷达最大的缺点是角度分辨率低,车载毫米波雷达一般采用相控阵天线进行测角,其天线设计与信号波长有着直接联系。相同孔径下,77GHz比24GHz能形成更窄的波束宽度,具有更高的角度分辨率,这点对于雷达远程探测非常重要,这是由于极坐标系下角度分辨率单元对应的弧长随距离的增加而增大,例如5度的分辨率在200米处的弧长就有约17米,比一般道路都宽了,目标在横向就无法区分了。
对于毫米波雷达系统工程师而言,角度分辨率的提升程度这还远远不够,因此需要引入MIMO技术,在信号处理角度拓展物理孔径,进一步增大角度分辨率。所以说,MIMO技术是一种基于硬件架构的信号处理算法。
关于MIMO雷达的定义,以及MIMO雷达的优劣,可参考本专栏的:《MIMO雷达浅谈》
4、MIMO毫米波雷达与4D毫米波成像雷达的关系
4D毫米波成像雷达本质上属于MIMO毫米波雷达,它是在现有MIMO毫米波雷达的基础上,不仅增加了俯仰维天线阵列,进而提高了俯仰维分辨率,而且采用了大规模阵列或是多片级联技术,增加了收发通道数目,提升了方位角分辨率。目标检测结果由单点升级成了点云。
正因为MIMO雷达的诸多优势,车载毫米波雷达搭上了MIMO技术的“顺风车”,朝着4D毫米波“成像”雷达方向发展。本专栏将结合4D毫米波成像雷达向大家展开介绍MIMO雷达技术,准备介绍以下这些内容,预计一年内更新完毕,欢迎在早期订阅(后期文章多了以后价格会上浮)。
一、4D毫米波雷达硬件系统架构
二、4D毫米波雷达天线阵列优化设计
1、天线设计要点
2、4D天线阵列布局设计
三、4D毫米波雷达波形设计
1、波形设计技术点
2、TDM波形
3、OFDM波形
4、CDM波形
5、BPM波形
四、 4D毫米波波束赋形
五、 4D毫米波雷达误差校正
1、误差分类与影响
2、误差校正技术
六、 4D毫米波雷达抗干扰设计
1、干扰类型与特点
2、抗干扰方法
七、 4D毫米波雷达DOA估计—测角
1、单脉冲测角方法
2、各种超分辨算法
八、 4D毫米波雷达目标检测—测距测速
1、测距方法
2、测速方法
九、 4D毫米波雷达数据处理
1、点云融合与聚类
2、航迹处理
3、微多普勒分析
4、点云识别
这篇关于MIMO雷达专题(〇)—— 总章的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!