本文主要是介绍[STM32U5]【NUCLEO-U575ZI-Q测评】+ 逆变器逐波限流,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
传统的逆变器一般是用互感器或者电阻采样电流进行峰值电流限制,其中外围需要用到运放及比较器,外围还有电阻分压进行阀值设定,还需设计迟滞电压部分电路,软件通过IO引脚进行边沿跳变或者电平检测,从而判断功率管过流,从而关断功率管驱动信号。而目前芯片自带比较器,DAC,Break功能大大的简化外围设计,而且能通过上位机软件配置阀值参数,方便生产过程参数偏差导致的限流点不一致问题。此次主要使用自带的比较器COMP1、COMP2组成窗口比较器,DAC输出给到COM1和COM2的负端输入,实现上下阀值带迟滞限制;COM1、COM2正端输入为电流采样信号,两个比较器进行比较异或输出,送入Break脚实现刹车关闭PWM驱动功能。PWM自带自恢复功能,实现每个驱动周限流。高级定时器TIM1实现2对4CH, 20KHz 820ns死区互补SPWM输出,此次测试限于示波器通道支持互补的一对驱动,上下端限压1.3V,使用2个10KΩ电阻分压接入两个比较器正端模拟电流信号。连接如下:


PA2作为COMP1、COMP2正端输入,PE9、PA7 (TIM1_CH1,TIM1_CH1N),PE11、PB0(TIM1_CH2,TIM1_CH2N)作为两对互补输出引脚;
如下是STM32CubeMx配置COMP1、COMP2,软件可配置迟滞,大大减少电路开销;


比较器负端输入使用DAC的两路输出,方便设置限流阀值点,配置如下: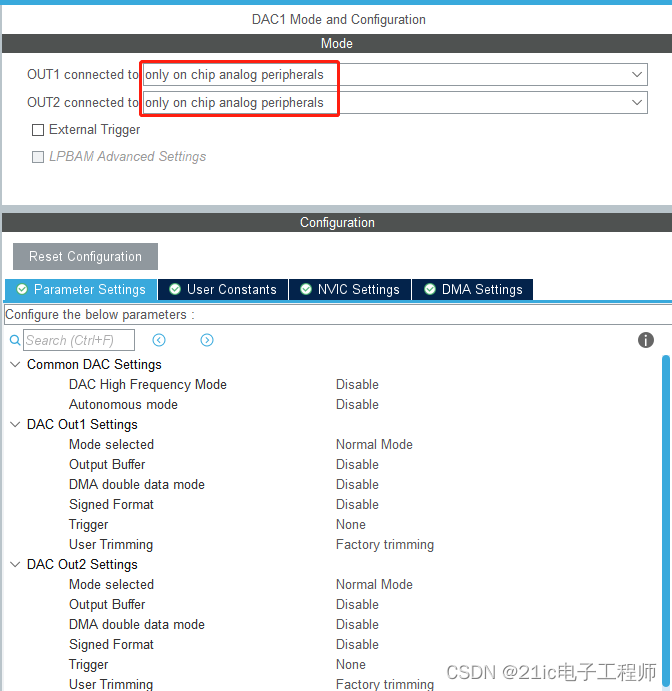
SPWM驱动采用高级定时器带死区控制及刹车功能,中央对齐模式,配置如下: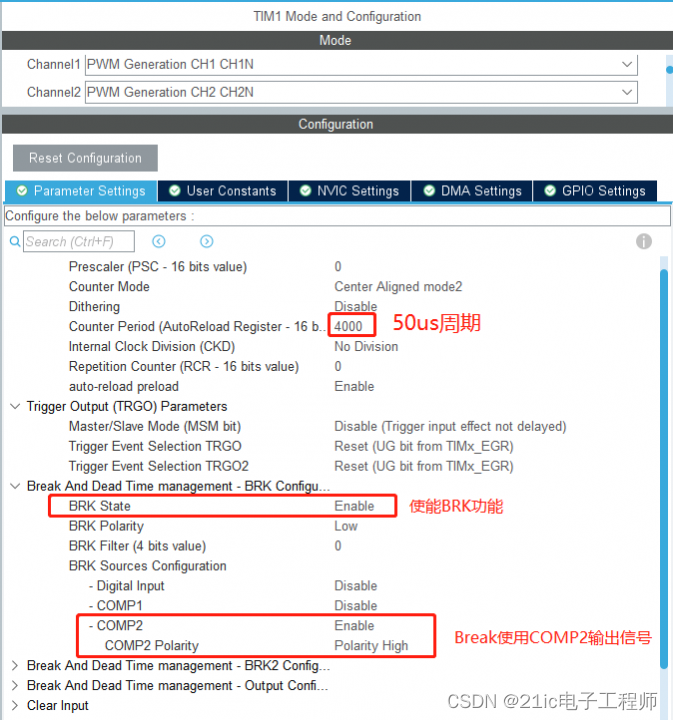

测试SPWM驱动及刹车功能。
1.SPWM驱动波形(PA2 = 1.65V):
2.死区时间设置820ns 130/160=812.5ns,与设置相符

3.IO引脚PA2(CH3)分别为1.65V、0V,3.3V来回切换,从下面波形可以看出,当比较器正端输入为0V和3.3V时,超出了配置阀值,SPWM(CH1 CH4) 立即关闭输出,当恢复到1.65V,SPWM自动恢复输出:

代码如下,注意SPWM切换相位及中断是25us一次需要使用溢出中断时判断向上计数对比较寄存器进行赋值,仅供参考:
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include <string.h>
#include <ctype.h>
#include <stdlib.h>
#include <stdarg.h>
#include <math.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define HalInvPwmEn() TIM1->CCER |= 0x55
#define HalInvPwmDis() TIM1->CCER &= ~0x55 #define HalInvPwmAoeEn() TIM1->BDTR |= (1 << 14);
#define HalInvPwmAoeDis() TIM1->BDTR &= ~(1 << 14);#define HalInvPwmMoeEn() TIM1->BDTR |= (1 << 15);
#define HalInvPwmMoeDis() TIM1->BDTR &= ~(1 << 15);
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
COMP_HandleTypeDef hcomp1;
COMP_HandleTypeDef hcomp2;DAC_HandleTypeDef hdac1;TIM_HandleTypeDef htim1;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void SystemPower_Config(void);
static void MX_GPIO_Init(void);
static void MX_ICACHE_Init(void);
static void MX_COMP1_Init(void);
static void MX_COMP2_Init(void);
static void MX_DAC1_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* Configure the System Power */SystemPower_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_ICACHE_Init();MX_COMP1_Init();MX_COMP2_Init();MX_DAC1_Init();MX_TIM1_Init();/* USER CODE BEGIN 2 */HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_1,DAC_ALIGN_12B_R,(uint32_t)4096*(1650+1300)/3300); HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_2,DAC_ALIGN_12B_R,(uint32_t)4096*(1650-1300)/3300);HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);HAL_DAC_Start(&hdac1,DAC_CHANNEL_2);HAL_COMP_Start(&hcomp1);HAL_COMP_Start(&hcomp2); HalInvPwmEn();HalInvPwmAoeEn(); //¿ªÆôSPWM__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_UPDATE);__HAL_TIM_ENABLE_IT(&htim1,TIM_FLAG_UPDATE); __HAL_TIM_ENABLE(&htim1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_1,DAC_ALIGN_12B_R,(uint32_t)4096*(1650+1300)/3300); //HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_2,DAC_ALIGN_12B_R,(uint32_t)4096*(1650-1300)/3300); }/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_MSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.LSIState = RCC_LSI_ON;RCC_OscInitStruct.MSIState = RCC_MSI_ON;RCC_OscInitStruct.MSICalibrationValue = RCC_MSICALIBRATION_DEFAULT;RCC_OscInitStruct.MSIClockRange = RCC_MSIRANGE_4;RCC_OscInitStruct.LSIDiv = RCC_LSI_DIV1;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_MSI;RCC_OscInitStruct.PLL.PLLMBOOST = RCC_PLLMBOOST_DIV1;RCC_OscInitStruct.PLL.PLLM = 1;RCC_OscInitStruct.PLL.PLLN = 80;RCC_OscInitStruct.PLL.PLLP = 2;RCC_OscInitStruct.PLL.PLLQ = 2;RCC_OscInitStruct.PLL.PLLR = 2;RCC_OscInitStruct.PLL.PLLRGE = RCC_PLLVCIRANGE_0;RCC_OscInitStruct.PLL.PLLFRACN = 0;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_PCLK3;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB3CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK){Error_Handler();}
}/*** @brief Power Configuration* @retval None*/
static void SystemPower_Config(void)
{/** Disable the internal Pull-Up in Dead Battery pins of UCPD peripheral*/HAL_PWREx_DisableUCPDDeadBattery();/** Switch to SMPS regulator instead of LDO*/if (HAL_PWREx_ConfigSupply(PWR_SMPS_SUPPLY) != HAL_OK){Error_Handler();}
/* USER CODE BEGIN PWR */
/* USER CODE END PWR */
}/*** @brief COMP1 Initialization Function* @param None* @retval None*/
static void MX_COMP1_Init(void)
{/* USER CODE BEGIN COMP1_Init 0 *//* USER CODE END COMP1_Init 0 *//* USER CODE BEGIN COMP1_Init 1 *//* USER CODE END COMP1_Init 1 */hcomp1.Instance = COMP1;hcomp1.Init.InputPlus = COMP_INPUT_PLUS_IO3;hcomp1.Init.InputMinus = COMP_INPUT_MINUS_DAC1_CH1;hcomp1.Init.OutputPol = COMP_OUTPUTPOL_NONINVERTED;hcomp1.Init.WindowOutput = COMP_WINDOWOUTPUT_EACH_COMP;hcomp1.Init.Hysteresis = COMP_HYSTERESIS_HIGH;hcomp1.Init.BlankingSrce = COMP_BLANKINGSRC_NONE;hcomp1.Init.Mode = COMP_POWERMODE_HIGHSPEED;hcomp1.Init.WindowMode = COMP_WINDOWMODE_DISABLE;hcomp1.Init.TriggerMode = COMP_TRIGGERMODE_NONE;if (HAL_COMP_Init(&hcomp1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN COMP1_Init 2 *//* USER CODE END COMP1_Init 2 */}/*** @brief COMP2 Initialization Function* @param None* @retval None*/
static void MX_COMP2_Init(void)
{/* USER CODE BEGIN COMP2_Init 0 *//* USER CODE END COMP2_Init 0 *//* USER CODE BEGIN COMP2_Init 1 *//* USER CODE END COMP2_Init 1 */hcomp2.Instance = COMP2;hcomp2.Init.InputPlus = COMP_INPUT_PLUS_IO1;hcomp2.Init.InputMinus = COMP_INPUT_MINUS_DAC1_CH2;hcomp2.Init.OutputPol = COMP_OUTPUTPOL_NONINVERTED;hcomp2.Init.WindowOutput = COMP_WINDOWOUTPUT_COMP2;hcomp2.Init.Hysteresis = COMP_HYSTERESIS_HIGH;hcomp2.Init.BlankingSrce = COMP_BLANKINGSRC_NONE;hcomp2.Init.Mode = COMP_POWERMODE_HIGHSPEED;hcomp2.Init.WindowMode = COMP_WINDOWMODE_COMP1_INPUT_PLUS_COMMON;hcomp2.Init.TriggerMode = COMP_TRIGGERMODE_NONE;if (HAL_COMP_Init(&hcomp2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN COMP2_Init 2 *//* USER CODE END COMP2_Init 2 */}/*** @brief DAC1 Initialization Function* @param None* @retval None*/
static void MX_DAC1_Init(void)
{/* USER CODE BEGIN DAC1_Init 0 *//* USER CODE END DAC1_Init 0 */DAC_ChannelConfTypeDef sConfig = {0};DAC_AutonomousModeConfTypeDef sAutonomousMode = {0};/* USER CODE BEGIN DAC1_Init 1 *//* USER CODE END DAC1_Init 1 *//** DAC Initialization*/hdac1.Instance = DAC1;if (HAL_DAC_Init(&hdac1) != HAL_OK){Error_Handler();}/** DAC channel OUT1 config*/sConfig.DAC_HighFrequency = DAC_HIGH_FREQUENCY_INTERFACE_MODE_DISABLE;sConfig.DAC_DMADoubleDataMode = DISABLE;sConfig.DAC_SignedFormat = DISABLE;sConfig.DAC_SampleAndHold = DAC_SAMPLEANDHOLD_DISABLE;sConfig.DAC_Trigger = DAC_TRIGGER_NONE;sConfig.DAC_OutputBuffer = DAC_OUTPUTBUFFER_DISABLE;sConfig.DAC_ConnectOnChipPeripheral = DAC_CHIPCONNECT_INTERNAL;sConfig.DAC_UserTrimming = DAC_TRIMMING_FACTORY;if (HAL_DAC_ConfigChannel(&hdac1, &sConfig, DAC_CHANNEL_1) != HAL_OK){Error_Handler();}/** Configure Autonomous Mode*/sAutonomousMode.AutonomousModeState = DAC_AUTONOMOUS_MODE_DISABLE;if (HAL_DACEx_SetConfigAutonomousMode(&hdac1, &sAutonomousMode) != HAL_OK){Error_Handler();}/** DAC channel OUT2 config*/if (HAL_DAC_ConfigChannel(&hdac1, &sConfig, DAC_CHANNEL_2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN DAC1_Init 2 *//* USER CODE END DAC1_Init 2 */}/*** @brief ICACHE Initialization Function* @param None* @retval None*/
static void MX_ICACHE_Init(void)
{/* USER CODE BEGIN ICACHE_Init 0 *//* USER CODE END ICACHE_Init 0 *//* USER CODE BEGIN ICACHE_Init 1 *//* USER CODE END ICACHE_Init 1 *//** Enable instruction cache in 1-way (direct mapped cache)*/if (HAL_ICACHE_ConfigAssociativityMode(ICACHE_1WAY) != HAL_OK){Error_Handler();}if (HAL_ICACHE_Enable() != HAL_OK){Error_Handler();}/* USER CODE BEGIN ICACHE_Init 2 *//* USER CODE END ICACHE_Init 2 */}/*** @brief TIM1 Initialization Function* @param None* @retval None*/
static void MX_TIM1_Init(void)
{/* USER CODE BEGIN TIM1_Init 0 *//* USER CODE END TIM1_Init 0 */TIM_MasterConfigTypeDef sMasterConfig = {0};TIMEx_BreakInputConfigTypeDef sBreakInputConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};/* USER CODE BEGIN TIM1_Init 1 *//* USER CODE END TIM1_Init 1 */htim1.Instance = TIM1;htim1.Init.Prescaler = 0;htim1.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED2;htim1.Init.Period = 4000;htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim1.Init.RepetitionCounter = 0;htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_PWM_Init(&htim1) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterOutputTrigger2 = TIM_TRGO2_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK){Error_Handler();}sBreakInputConfig.Source = TIM_BREAKINPUTSOURCE_COMP2;sBreakInputConfig.Enable = TIM_BREAKINPUTSOURCE_ENABLE;sBreakInputConfig.Polarity = TIM_BREAKINPUTSOURCE_POLARITY_HIGH;if (HAL_TIMEx_ConfigBreakInput(&htim1, TIM_BREAKINPUT_BRK, &sBreakInputConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 0;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK){Error_Handler();}sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_ENABLE;sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_ENABLE;sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;sBreakDeadTimeConfig.DeadTime = 130;sBreakDeadTimeConfig.BreakState = TIM_BREAK_ENABLE;sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_LOW;sBreakDeadTimeConfig.BreakFilter = 0;sBreakDeadTimeConfig.BreakAFMode = TIM_BREAK_AFMODE_INPUT;sBreakDeadTimeConfig.Break2State = TIM_BREAK2_DISABLE;sBreakDeadTimeConfig.Break2Polarity = TIM_BREAK2POLARITY_LOW;sBreakDeadTimeConfig.Break2Filter = 0;sBreakDeadTimeConfig.Break2AFMode = TIM_BREAK_AFMODE_INPUT;sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM1_Init 2 *//* USER CODE END TIM1_Init 2 */HAL_TIM_MspPostInit(&htim1);}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 *//* GPIO Ports Clock Enable */__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();__HAL_RCC_GPIOE_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);/*Configure GPIO pin : PB7 */GPIO_InitStruct.Pin = GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/**
* @brief COMP MSP Initialization
* This function configures the hardware resources used in this example
* @param hcomp: COMP handle pointer
* @retval None
*/
void HAL_COMP_MspInit(COMP_HandleTypeDef* hcomp)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(hcomp->Instance==COMP1){/* USER CODE BEGIN COMP1_MspInit 0 *//* USER CODE END COMP1_MspInit 0 *//* Peripheral clock enable */HAL_RCC_COMP_CLK_ENABLED++;if(HAL_RCC_COMP_CLK_ENABLED==1){__HAL_RCC_COMP_CLK_ENABLE();}__HAL_RCC_GPIOA_CLK_ENABLE();/**COMP1 GPIO ConfigurationPA2 ------> COMP1_INP*/GPIO_InitStruct.Pin = GPIO_PIN_2;GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* USER CODE BEGIN COMP1_MspInit 1 *//* USER CODE END COMP1_MspInit 1 */}else if(hcomp->Instance==COMP2){/* USER CODE BEGIN COMP2_MspInit 0 *//* USER CODE END COMP2_MspInit 0 *//* Peripheral clock enable */HAL_RCC_COMP_CLK_ENABLED++;if(HAL_RCC_COMP_CLK_ENABLED==1){__HAL_RCC_COMP_CLK_ENABLE();}/* USER CODE BEGIN COMP2_MspInit 1 *//* USER CODE END COMP2_MspInit 1 */}}/**
* @brief COMP MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param hcomp: COMP handle pointer
* @retval None
*/
void HAL_COMP_MspDeInit(COMP_HandleTypeDef* hcomp)
{if(hcomp->Instance==COMP1){/* USER CODE BEGIN COMP1_MspDeInit 0 *//* USER CODE END COMP1_MspDeInit 0 *//* Peripheral clock disable */HAL_RCC_COMP_CLK_ENABLED--;if(HAL_RCC_COMP_CLK_ENABLED==0){__HAL_RCC_COMP_CLK_DISABLE();}/**COMP1 GPIO ConfigurationPA2 ------> COMP1_INP*/HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2);/* USER CODE BEGIN COMP1_MspDeInit 1 *//* USER CODE END COMP1_MspDeInit 1 */}else if(hcomp->Instance==COMP2){/* USER CODE BEGIN COMP2_MspDeInit 0 *//* USER CODE END COMP2_MspDeInit 0 *//* Peripheral clock disable */HAL_RCC_COMP_CLK_ENABLED--;if(HAL_RCC_COMP_CLK_ENABLED==0){__HAL_RCC_COMP_CLK_DISABLE();}/* USER CODE BEGIN COMP2_MspDeInit 1 *//* USER CODE END COMP2_MspDeInit 1 */}}/**
* @brief DAC MSP Initialization
* This function configures the hardware resources used in this example
* @param hdac: DAC handle pointer
* @retval None
*/
void HAL_DAC_MspInit(DAC_HandleTypeDef* hdac)
{RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};if(hdac->Instance==DAC1){/* USER CODE BEGIN DAC1_MspInit 0 *//* USER CODE END DAC1_MspInit 0 *//** Initializes the peripherals clock*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADCDAC|RCC_PERIPHCLK_DAC1;PeriphClkInit.AdcDacClockSelection = RCC_ADCDACCLKSOURCE_HSI;PeriphClkInit.Dac1ClockSelection = RCC_DAC1CLKSOURCE_LSI;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}/* Peripheral clock enable */__HAL_RCC_DAC1_CLK_ENABLE();/* USER CODE BEGIN DAC1_MspInit 1 *//* USER CODE END DAC1_MspInit 1 */}}/**
* @brief DAC MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param hdac: DAC handle pointer
* @retval None
*/
void HAL_DAC_MspDeInit(DAC_HandleTypeDef* hdac)
{if(hdac->Instance==DAC1){/* USER CODE BEGIN DAC1_MspDeInit 0 *//* USER CODE END DAC1_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_DAC1_CLK_DISABLE();/* USER CODE BEGIN DAC1_MspDeInit 1 *//* USER CODE END DAC1_MspDeInit 1 */}}/**
* @brief TIM_PWM MSP Initialization
* This function configures the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
{if(htim_pwm->Instance==TIM1){/* USER CODE BEGIN TIM1_MspInit 0 *//* USER CODE END TIM1_MspInit 0 *//* Peripheral clock enable */__HAL_RCC_TIM1_CLK_ENABLE();/* TIM1 interrupt Init */HAL_NVIC_SetPriority(TIM1_UP_IRQn, 0, 0);HAL_NVIC_EnableIRQ(TIM1_UP_IRQn);/* USER CODE BEGIN TIM1_MspInit 1 *//* USER CODE END TIM1_MspInit 1 */}}void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(htim->Instance==TIM1){/* USER CODE BEGIN TIM1_MspPostInit 0 *//* USER CODE END TIM1_MspPostInit 0 */__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();__HAL_RCC_GPIOE_CLK_ENABLE();/**TIM1 GPIO ConfigurationPA7 ------> TIM1_CH1NPB0 ------> TIM1_CH2NPE9 ------> TIM1_CH1PE11 ------> TIM1_CH2*/GPIO_InitStruct.Pin = GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_11;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);/* USER CODE BEGIN TIM1_MspPostInit 1 *//* USER CODE END TIM1_MspPostInit 1 */}}
/**
* @brief TIM_PWM MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
{if(htim_pwm->Instance==TIM1){/* USER CODE BEGIN TIM1_MspDeInit 0 *//* USER CODE END TIM1_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM1_CLK_DISABLE();/* TIM1 interrupt DeInit */HAL_NVIC_DisableIRQ(TIM1_UP_IRQn);/* USER CODE BEGIN TIM1_MspDeInit 1 *//* USER CODE END TIM1_MspDeInit 1 */}}/*** @brief This function handles TIM1 Update interrupt.*/
void TIM1_UP_IRQHandler(void)
{/* USER CODE BEGIN TIM1_UP_IRQn 0 */static uint16_t SineCnt;static uint16_t GpioFlashCnt = 0x00;int32_t Spwm_Duty;/* USER CODE END TIM1_UP_IRQn 0 *///HAL_TIM_IRQHandler(&htim1);/* USER CODE BEGIN TIM1_UP_IRQn 1 */if((TIM1->SR & TIM_FLAG_UPDATE) == TIM_FLAG_UPDATE){//__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_UPDATE);TIM1->SR = ~TIM_FLAG_UPDATE;if((TIM1->CR1 & TIM_CR1_DIR) == TIM_CR1_DIR) {GpioFlashCnt++;if(GpioFlashCnt >= 10000){GpioFlashCnt = 0x00;HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_7);}Spwm_Duty = (int32_t)Sine[SineCnt] * 3600 >> 12;if(Spwm_Duty >= 0){HalSetInvPwmPosDuty(Spwm_Duty); //Õý°ëÖÜHalSetInvPwmNegDuty(0); }else{HalSetInvPwmPosDuty(0); //¸º°ëÖÜHalSetInvPwmNegDuty(abs(Spwm_Duty)); }SineCnt++;if(SineCnt >= 400)SineCnt = 0x00;}}/* USER CODE END TIM1_UP_IRQn 1 */
}---------------------
作者:416775364TP
链接:https://bbs.21ic.com/icview-3290434-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。
这篇关于[STM32U5]【NUCLEO-U575ZI-Q测评】+ 逆变器逐波限流的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








