本文主要是介绍IMU角度跳变问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 一、IMU角度跳变现象
- 二、问题分析
- 三、改进
- 总结
前言
在融合定位实验中偶然发现IMU的角度存在跳变现象,本文主要记录问题分析和解决方法。
一、IMU角度跳变现象
imu_driver对原始数据进行解析后,以ROS标准的IMU_msg格式发布出来,然后融合定位模块订阅该msg,对其中的IMU四元数通过Eigen中的函数转成欧拉角,但欧拉角时不时的发生180度跳变,比如-124.5度会突然跳变至55.5度,运行一定角度后,又会再次跳回来,此时查看四元数并无很大的变化。
二、问题分析
订阅IMU_topic后直接调用Eigen中的函数将四元数转成欧拉角。
原程序是先记录第一条msg的角度,再将后续收到的msg的角度值与第一条作差,得到相对的偏航角,用于机器人控制。部分代码如下:
Eigen::Vector3d MsgEuler = MsgQuat.matrix().eulerAngles(0,1,2);
if(mbImuTfFromImu2BaseLink) {Eigen::AngleAxisd TfPitch(mImuTfPitch / 180.0 * M_PI, Eigen::Vector3d(1, 0, 0));Eigen::AngleAxisd TfRoll(mImuTfRoll / 180.0 * M_PI, Eigen::Vector3d(0, 1, 0));Eigen::AngleAxisd TfYaw(mImuTfYaw / 180.0 * M_PI, Eigen::Vector3d(0, 0, 1));ImuQuat = Eigen::Quaterniond(mImuFirstQuat * TfRoll.matrix() * TfPitch.matrix() * TfYaw.matrix()).inverse() * Eigen::Quaterniond(MsgQuat * TfRoll.matrix() * TfPitch.matrix() * TfYaw.matrix());
} else {Eigen::AngleAxisd TfPitch((mImuTfPitch - 180.0) / 180.0 * M_PI, Eigen::Vector3d(1, 0, 0));Eigen::AngleAxisd TfRoll((mImuTfRoll - 180.0) / 180.0 * M_PI, Eigen::Vector3d(0, 1, 0));Eigen::AngleAxisd TfYaw((mImuTfYaw - 180.0) / 180.0 * M_PI, Eigen::Vector3d(0, 0, 1));ImuQuat = Eigen::Quaterniond(mImuFirstQuat * TfRoll.matrix() * TfPitch.matrix() * TfYaw.matrix()).inverse() * Eigen::Quaterniond(MsgQuat * TfRoll.matrix() * TfPitch.matrix() * TfYaw.matrix());
然而采用这种计算方法将四元数换算成欧拉角存在角度跳变问题,比如当前角度为-124.5度,突然跳变至55.5度,但看前四列的四元数并未有巨大变化。

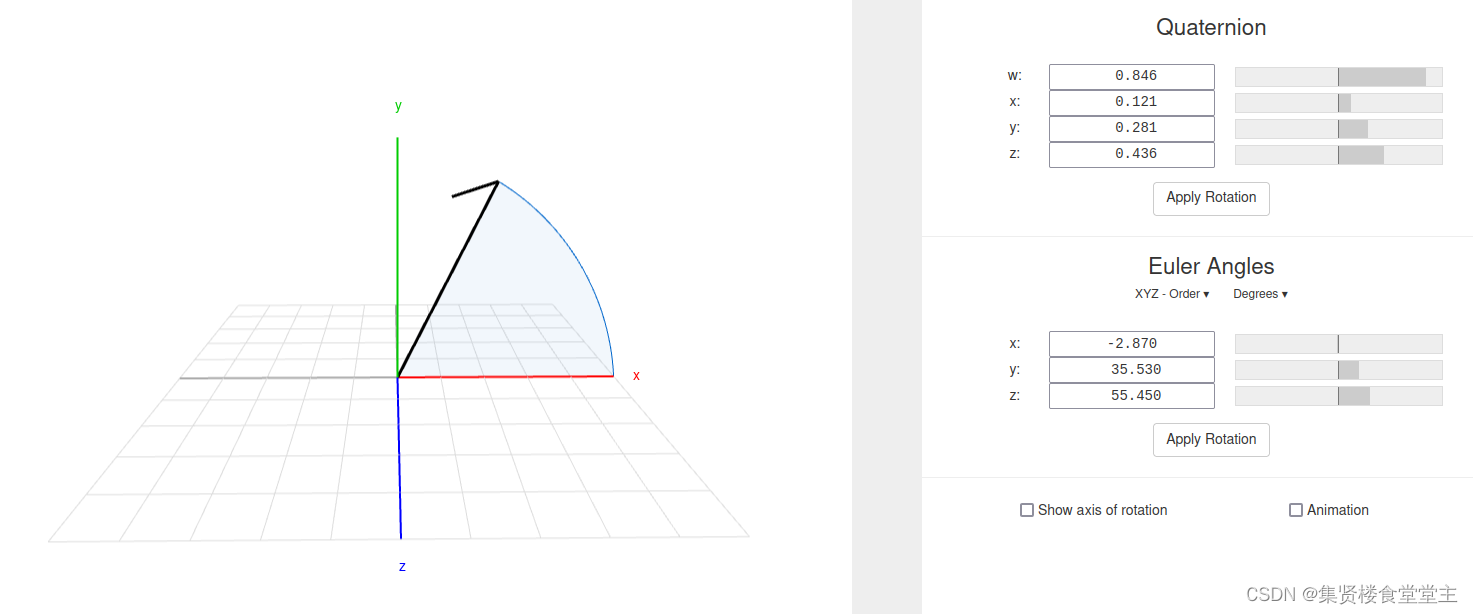
查阅相关资料后发现,同一个四元数,可以用2个欧拉角来表示,而这个方法得到的结果有可能是用转角大于2PI的方式表达的。比如我在RPY角度里输入[177.13,144.47,-124.55],画出此时向量,结果点击apply,此时角度自动变成[-2.87,35.53,55.45],再看角度和四元数与上图跳变一致,印证了这个说法。
三、改进
为了避免这个问题,可以用以下方法
static void toEulerAngle(const Eigen::Quaterniond& q, double& roll, double& pitch, double& yaw)
{// roll (x-axis rotation)double sinr_cosp = +2.0 * (q.w() * q.x() + q.y() * q.z());double cosr_cosp = +1.0 - 2.0 * (q.x() * q.x() + q.y() * q.y());roll = atan2(sinr_cosp, cosr_cosp);// pitch (y-axis rotation)double sinp = +2.0 * (q.w() * q.y() - q.z() * q.x());if (fabs(sinp) >= 1)pitch = copysign(M_PI / 2, sinp); // use 90 degrees if out of rangeelsepitch = asin(sinp);// yaw (z-axis rotation)double siny_cosp = +2.0 * (q.w() * q.z() + q.x() * q.y());double cosy_cosp = +1.0 - 2.0 * (q.y() * q.y() + q.z() * q.z());yaw = atan2(siny_cosp, cosy_cosp);
这里求RY是用atan2()函数,该函数值域为[-pi,pi]可以覆盖roll、yaw整个角度变化范围,无问题;而asin()函数值域为[-pi/2,pi/2]无法完全覆盖pitch角范围,定义域为[-1,1],若直接使用,便会出问题。因此在求出sinp时,首先会对其进行判断,看是否超出范围,若超出,则用90度代替,并取此时sinp的符号。
顺便讲讲copysign(x,y)函数,就是返回带有符号y的数字( x )
float x = 2.5;
float y = -2;
copysign(x, y);
OUTPUT:-2.5
也就是说如果上述sinp符号为正,且超出范围,则最后程序输出+pi/2。
总结
最终通过上述方法,转换后的yaw角再无跳变现象,因此工程问题得以解决。如果单从问题本身来讲,对四元数的理解仍然不够深刻,后续需要进一步研究。
这篇关于IMU角度跳变问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









